

1.ТММ - научная основа создания новых механизмов и машин. Классификация машин и механизмов.
ТММ – это наука об общих методах исследования свойств механизмов и машин и проектирования их схем. Скелетом машины является схема (структурная кинематическая). Выбор и проектирование схемы важнейший этап. ТММ является теоретической основой проектирования схем, схемы являются орудие и объектом исследования.
Машина - техническое устройство, выполняющее преобразование энергии, материалов и информации с целью облегчения физического и умственного труда человека, повышения его качества и производительности.
Существуют следующие виды машин:
1. Энергетические машины - преобразующие энергию одного вида в энергию другого вида. Эти машины бывают двух разновидностей:
Двигатели, которые преобразуют любой вид энергии в механическую (например, электродвигатели преобразуют электрическую энергию, двигатели внутреннего сгорания преобразуют энергию расширения газов при сгорании в цилиндре).
Генераторы, которые преобразуют механическую энергию в энергию другого вида (например, электрогенератор преобразует механическую энергию паровой или гидравлической турбины в электрическую).
2. Рабочие машины - машины использующие механическую энергию для совершения работы по перемещению и преобразованию материалов. Эти машины тоже имеют две разновидности:
Транспортные машины, которые используют механическую энергию для изменения положения объекта (его координат).
Технологические машины, использующие механическую энергию для преобразования формы, свойств, размеров и состояния объекта.
3. Информационные машины - машины, предназначенные для обработки и преобразования информации. Они подразделяются на:
Математические машины, преобразующие входную информацию в математическую модель исследуемого объекта.
Контрольно-управляющие машины, преобразующие входную информацию (программу) в сигналы управления рабочей или энергетической машиной.
4. Кибернетические машины - машины управляющие рабочими или энергетическими машинами, которые способны изменять программу своих действий в зависимости от состояния окружающей среды (т.е. машины обладающие элементами искусственного интеллекта (роботы)).
Универсальной классификации нет, но наиболее распространены 3 вида классификации:
Функциональная. По принципу выполнения технологического процесса механизмы делятся на механизмы: приведения в движение режущего инструмента; питания, загрузки, съёма детали; транспортирования и т.д.;
Структурно-конструктивная. Предусматривает разделение механизмов как по конструктивным особенностям, так и по структурным принципам. К этому виду относят механизмы: кривошипно-ползунный; кулисный; рычажно-зубчатый; кулачково-рычажный и т.д.;
Структурная. Проста, рациональна, тесно связана с образованием механизма, его строением, методами кинематического и силового анализа, была предложена Л.В. Ассуром в 1916 году и основана на принципе построения механизма путем наслоения (присоединения) кинематических цепей (в виде структурных групп) к начальному механизму. Согласно этой классификации, любой механизм можно получить из более простого присоединением к последнему кинематических цепей с числом степеней свободы W = 0, получивших название структурных групп, или групп Ассура. Недостаток классификации – неудобство для выбора механизма с требуемыми свойствами.
Основные виды механизмов
1) Рычажный - механизм, состоящий из звеньев, соединённых между собой в низшие кинематические пары. Р. м. бывают плоские и пространственные. В плоских Р. м. звенья соприкасаются по окружности (шарниры, вращательные пары) и по линии (поступательные пары). В пространственном Р. м. звенья соединяются по цилиндрическим или сферическим поверхностям (вращательные пары) и по плоскости (поступательные пары).
2) Фрикционный - механизмы, в которых используются силы трения В целом ряде механизмов, применяемых в современной технике, используются силы трения в качестве сил, приводящих в движение звенья, или сил, тормозящих их движения. Механизмы, в которых используются силы трения, носят название фрикционных
3) Ременные и цепные передачи. Механизмы передач с гибкими звеньями Механизмы передач с гибкими звеньями широко применяются в некоторых отраслях техники. Достаточно указать на передачи ременные, канатные, цепные и др. Такие механизмы применяются в сельскохозяйственных машинах, транспортерах, горных машинах и др.
4) Зубчатые. Механизмы трехзвенных зубчатых передач с неподвижными осями
Самое широкое применение в машинах и приборах находят зубчатые механизмы. Каждое колесо представляет собой круглый цилиндр, на поверхности которого расположены зубья. Два зубчатых колеса, находящихся в соприкосновении, своими зубьями образуют зубчатое зацепление.
5) Кулачковые - называется трехзвенный механизм с высшей кинематической парой входное звено которого называется кулачком, а выходное - толкателем (или коромыслом). Часто для замены в высшей паре трения скольжения трением качения и уменьшения износа, как кулачка, так и толкателя, в схему механизма включают дополнительное звено - ролик и вращательную кинематическую пару.
2.Основные понятия: механизм, машина. Классы современных машин. (см БИЛЕТ 1) Звенья механизма, их виды
Звеньями называются твердые тела, подвижная совокупность которых образует механизм. Звеном может быть как одно твердое тело, так и несколько твердых тел при условии их жесткого соединения друг с другом, т.е. звено- это то, что движется в механизме как одно целое. Звенья механизма имеют название и условное изображение на схемах.
В механизме выделяют звенья:
- подвижные и одно, принимаемое за неподвижное – стойку (корпус, основание, станина и т.п.);
- из подвижных – входное и выходное звено. Входным является звено, которому сообщается извне заданное движение и входной силовой фактор (момент, сила). Выходным считается звено, на котором получают требуемое движение и требуемый силовой фактор (момент, сила).
Обычно входное звено принимают за начальное, которое образует со стойкой начальный двухзвенник
О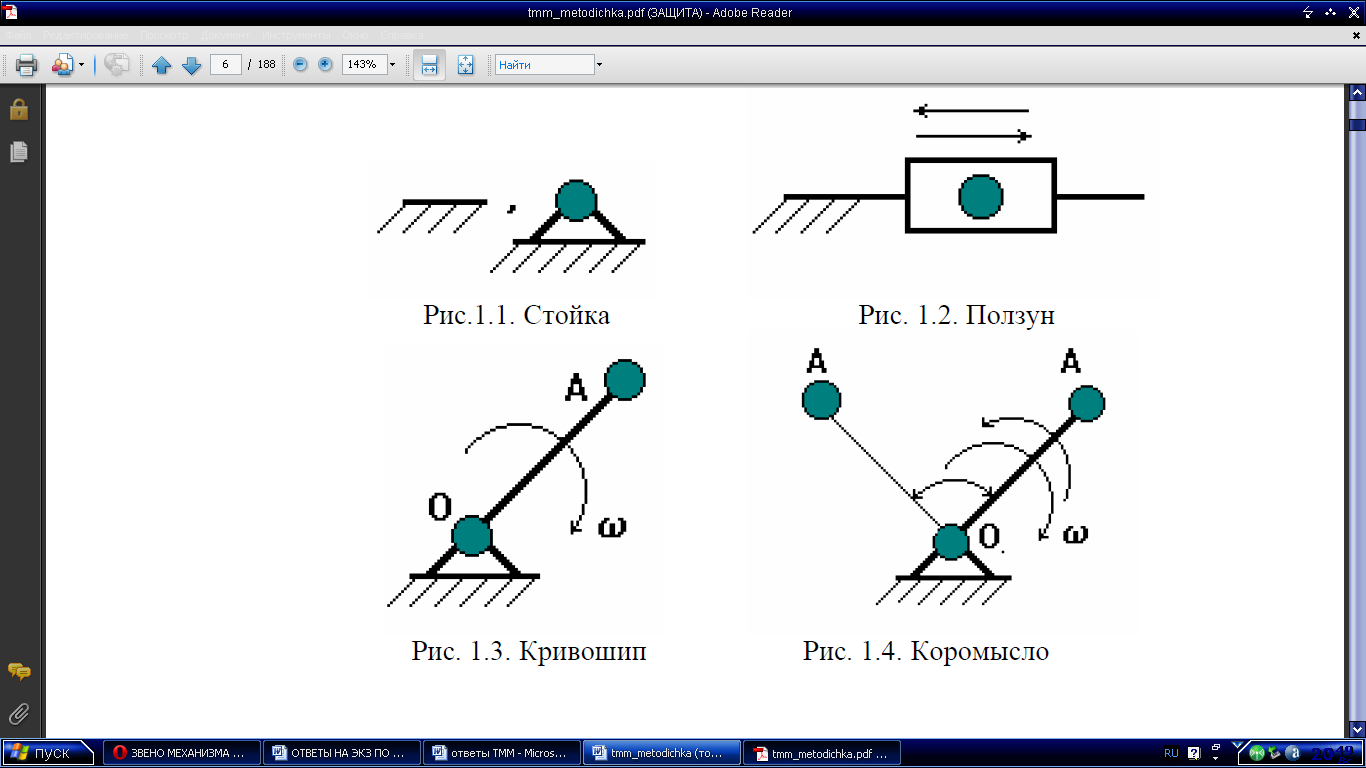 сновные
из них:
стойка, ползун, кривошип, коромысло,
шатун, кулиса, камень.
сновные
из них:
стойка, ползун, кривошип, коромысло,
шатун, кулиса, камень.
Стойкой называется неподвижное звено механизма (у транспортной машины – корпус). Относительно стойки рассматривается абсолютное движение остальных звеньев механизма.
Ползуном называется звено механизма, совершающее возвратно-поступательное движение в направляющих стойки.
Кривошипом называется звено механизма, совершающее полное вращение с неизменной осью на стойке.
К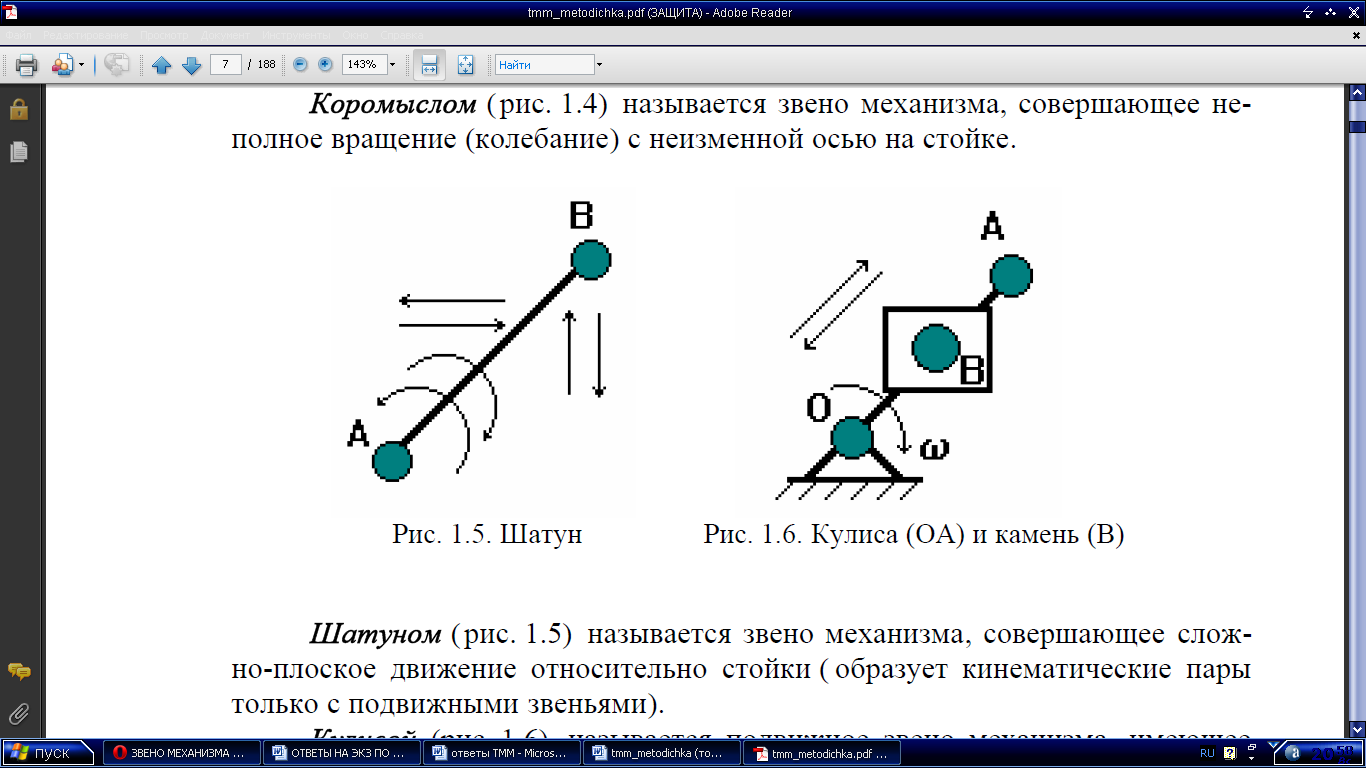 оромыслом
называется
звено механизма, совершающее неполное
вращение (колебание) с неизменной осью
на стойке.
оромыслом
называется
звено механизма, совершающее неполное
вращение (колебание) с неизменной осью
на стойке.
Шатуном называется звено механизма, совершающее сложно-плоское движение относительно стойки ( образует кинематические пары только с подвижными звеньями).
Кулисой называется подвижное звено механизма, имеющее направляющие.
Камнем называется звено механизма, совершающее сложно-плоское движение в направляющих кулисы.
Кулачок-звено, имеющее криволинейный профиль и полностью определяющее движение звена на выходе; Зубч. колесо- это вращающее звено, имеющее нарезанные зубья, которые обеспечивают непрерывное движ. парных звеньев)
3.Структурный анализ механизмов. Звенья механизма, их виды. (Билет №2) Кинематические пары и их классификация. Кинематическая цепь.
Структурный анализ выполняется обратно синтезу для существующих механизмов или для проверки оптимальности вновь проектируемого механизма.
При структурном анализе необходимо составить структурную схему механизма, выделив в нём звенья и кинематические пары, установить вид кинематических пар, найти число степеней свободы механизма, разложить его на структурные группы и составить формулу строения механизма.
СТРУКТУРНАЯ СХЕМА МЕХАНИЗМА – схема содержащая стойку, подвижные звенья, подвижные звенья, кинематические пары с обозначением их вида и подвижности и определяющая взаимное расположение этих элементов.
Структурную схему составляют для существующего или проектируемого механизма с целью выявить его особенности при передаче механического движения. При этом используют структурные формулы для числа степеней свободы [1]:
- пространственного механизма
![]()
-плоского механизма
![]()
q - показатель совершенства структуры механизма:
- при q=0: механизм – статически определимая, оптимальная система с самоустанавливающимися звеньями, собирается без деформации звеньев и натягов в КП;
- при q=0:механизм имеет q избыточных (повторяющихся) связей в КП, статически неопределим, его сборка возможна только при деформации звеньев и натягах в КП, увеличены силы трения в КП и их износ, снижаются КПД и долговечность, удорожается изготовление механизма;
- при q<0: механизм имеет q избыточных подвижностей отдельных звеньев, которые могут быть допустимы и полезны.
КИНЕМАТИЧЕСКАЯ ПАРА (КП) – подвижное соединение двух соприкасающихся звеньев. Поверхности, линии и точки, по которым соприкасаются звенья пары, называются элементами кинематической пары.
Кинематические пары (КП) классифицируются по следующим признакам:
1) По виду места контакта (места связи) поверхностей звеньев:
- низшие, в
которых контакт звеньев осуществляется
по плоскости или поверхности (пары
скольжения);
низшие, в
которых контакт звеньев осуществляется
по плоскости или поверхности (пары
скольжения);
- высшие, в которых контакт звеньев осуществляется по линиям или точкам (пары, допускающие скольжение с перекатыванием). Они имеются, например, в зубчатых и кулачковых механизмах).
Достоинство низших пар – повышенная долговечность соединения благодаря небольшим удельным нагрузкам на поверхность. В высших парах соприкосновение звеньев происходит на небольших площадках, что ведет к их ускоренному износу. Посредством низших пар можно осуществлять относительно простые движения, высшие пары представляют в этом отношении большие возможности.
2) по относительному движению звеньев, образующих пару:
-
вращательные
![]() -
поступательные
-
поступательные
![]() -
цилиндрические
-
цилиндрические
![]()
-
сферические
 -
винтовые ;
-
плоские
-
винтовые ;
-
плоские
3) по способу замыкания (обеспечения контакта звеньев пары):
- силовое (за счет действия сил веса или силы упругости пружины);
- геометрическое (за счет конструкции рабочих поверхностей пары).
4) по числу подвижностей в относительном движении звеньев (одно,двух, трех, четырех-подвижные).
5) по числу условий связи, накладываемых на относительное движение звеньев (число условий связи определяет класс кинематической пары);
Тело, находясь в пространстве (в декартовой системе координат X, Y, Z) имеет 6 степеней свободы. Оно может перемещаться вдоль каждой из трёх осей X, Y и Z, а также вращаться вокруг каждой оси. Если тело (звено) образует с другим телом (звеном) кинематическую пару, то оно теряет одну или несколько из этих 6 степеней свободы.
Все пары делятся на пять классов, в зависимости от числа налагаемых связей на подвижность каждого из звеньев. Например, если телами (звеньями), образовавшими кинематическую пару, утрачено по 5 степеней свободы каждым, эту пару называют кинематической парой 5-го класса. Если утрачено 4 степени свободы – 4-го класса и т.д.
КИНЕМАТИЧЕСКАЯ ЦЕПЬ – система звеньев, образующих между собой кинематические пары.
Кинематические цепи бывают:
- замкнутые (простые). В замкнутой цепи каждое звено входит не менее, чем две кинематические пары.
- разомкнутые (простые).
- сложные.
По признаку наличия разветвлений различают цепи простые (каждое звено цепи входит не более, чем две кинематических пары) и сложные или разветвленные (некоторые звенья входят в три, или более пары); в разветвленных цепях могут присутствовать так называемые кратные (двойные, тройные и т.д.) шарниры.
По области движения звеньев цепи бывают плоские (траектории движения точек всех звеньев - плоские кривые, лежащие в параллельных плоскостях) и пространственные.
Чтобы из кинематической цепи получить механизм, необходимо:
- одно звено сделать неподвижным, т.е. образовать станину (стойку);
- одному или нескольким звеньям задать закон движения (сделать ведущими) таким образом, чтобы все остальные звенья совершали требуемые целесообразные движения.