

9.Силовой расчёт механизмов. Задачи и методы силового расчёта. Реакции кп. Аналитический метод силового расчёта механизмов.
При работе механизма к его звеньям приложены внешние силы и моменты: движущие силы и моменты, силы и моменты сопротивления, силы тяжести подвижных звеньев и силы упругости гибких элементов. Под действием этих силовых факторов между элементами звеньев в кинематических парах (КП) возникают внутренние силы взаимодействия. Определение внутренних сил, а также внешних уравновешивающих силовых факторов, составляет содержание силового расчета механизма.
Рассмотрим действие сил в КП, полагая в первом приближении, что влияние сил трения мало и им можно пренебречь. В этом случае силы взаимодействия связаны третьим законом Ньютона и направлены по общей нормали к поверхности соприкосновения элементов звеньев в КП.
1.
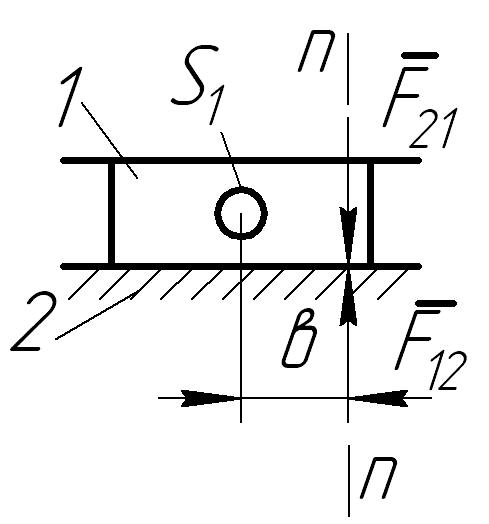
В одноподвижной поступательной КП
сила
![]() ,
приложенная к звену 1 от звена 2,
направлена по нормали n-n.
,
приложенная к звену 1 от звена 2,
направлена по нормали n-n.
|
Согласно
третьему закону Ньютона
Неизвестными
являются модуль сил и координата «b»
точки их приложения относительно
центр масс
|
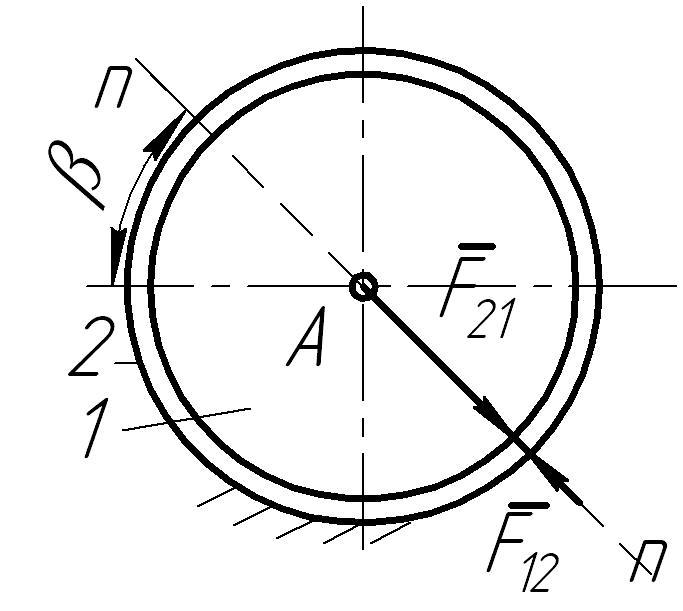
2.
В одноподвижной
вращательной КП сила
![]() направлена нормально к цилиндрической
поверхности соприкосновения обоих
звеньев 1,2
и проходит через центр А
шарнира.
направлена нормально к цилиндрической
поверхности соприкосновения обоих
звеньев 1,2
и проходит через центр А
шарнира.
|
Сила
.
Неизвестными являются модуль сил и
угол
|
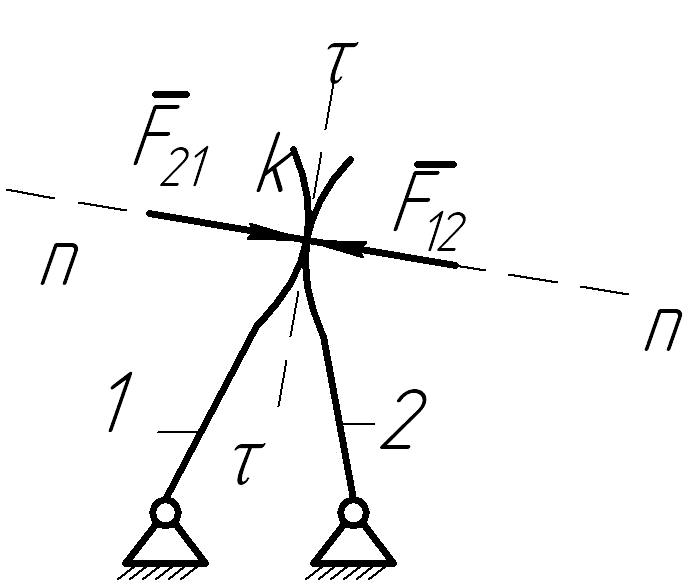
3. В высшей двухподвижной КП сила направлена по общей нормали n-n перпендикулярно касательной τ-τ к поверхностям в точке K контакта звеньев 1 и 2.
|
Сила . Следовательно, для сил известны точка приложения (точка К) и линия действия n-n. Неизвестным остается модуль сил. |
Нагруженность звеньев определяется также их движением с ускорениями, которые в современных быстроходных машинах весьма значительны. Учет этих ускорений выполним методом кинетостатики, условно приложив к каждому подвижному звену главный вектор и главный момент сил инерции:
,
![]() (6.1)
(6.1)
где
![]() ,
,
![]() - масса и момент инерции i-го
звена,
- масса и момент инерции i-го
звена,
![]() ,
,
![]() - вектор ускорения центра масс и угловое
ускорение i-го
звена.
- вектор ускорения центра масс и угловое
ускорение i-го
звена.
В основе метода кинетостатики лежит принцип Даламбера: при движении механической системы приложенные к её звеньям активные силы, реакции связей и силы инерции образуют равновесную систему сил в любой момент движения. Приложив к подвижным звеньям механизма силы и моменты сил инерции по уравнениям (6.1), можем записать три уравнения кинетостатики для каждого i-го звена:
![]() (6.2)
(6.2)
![]() (6.3)
(6.3)
![]() .
(6.4)
.
(6.4)
Алгебраические уравнения (6.2) и (6.3) могут быть заменены одним эквивалентным векторным уравнением сил:
![]() (6.5)
(6.5)
Уравнения (6.2) - (6.4) используют для силового расчета рычажных механизмов координатным (аналитическим) способом, а уравнение (6.5) – для расчета векторным (графическим) способом.