

39.Основные схемы кулачковых механизмов. (Билет 40) Методы замыкания кулачковых механизмов. Схемы замыкания.
40.Кулачковые механизмы. Виды кулачковых механизмов и их особенности.
Кулачковым называется трехзвенный механизм с высшей кинематической парой входное звено которого называется кулачком, а выходное - толкателем (или коромыслом). Часто для замены в высшей паре трения скольжения трением качения и уменьшения износа, как кулачка, так и толкателя, в схему механизма включают дополнительное звено - ролик и вращательную кинематическую пару. Подвижность в этой кинематической паре не изменяет передаточных функций механизма и является местной подвижностью.
Кулачковые механизмы являются одними из наиболее распространенных устройств в различных приводах и машинах: в силовых приводах станков-автоматов, в приводах перемещения резцов и столов зубострогальных и зубодолбёжных станков, в клапанных механизмах поршневых насосов, компрессоров, газораспределения ДВС и т.д.
В связи с широким применением кулачковые механизмы конструктивно весьма разнообразны. В них используются кулачки : плоские, с поступательным перемещением; цилиндрические; дисковые; конические; гиперболоидные; коноидные.
Применяемые толкатели 2 разделяются (рис.15.1):
— по
виду совершаемого движения: с поступательным
движением (схемы
![]()
![]() );
с вращательным движением (схемы
);
с вращательным движением (схемы
![]() ),
называемый коромысловым;
),
называемый коромысловым;
— по форме рабочей поверхности башмака, контактирующего с кулачком 1:
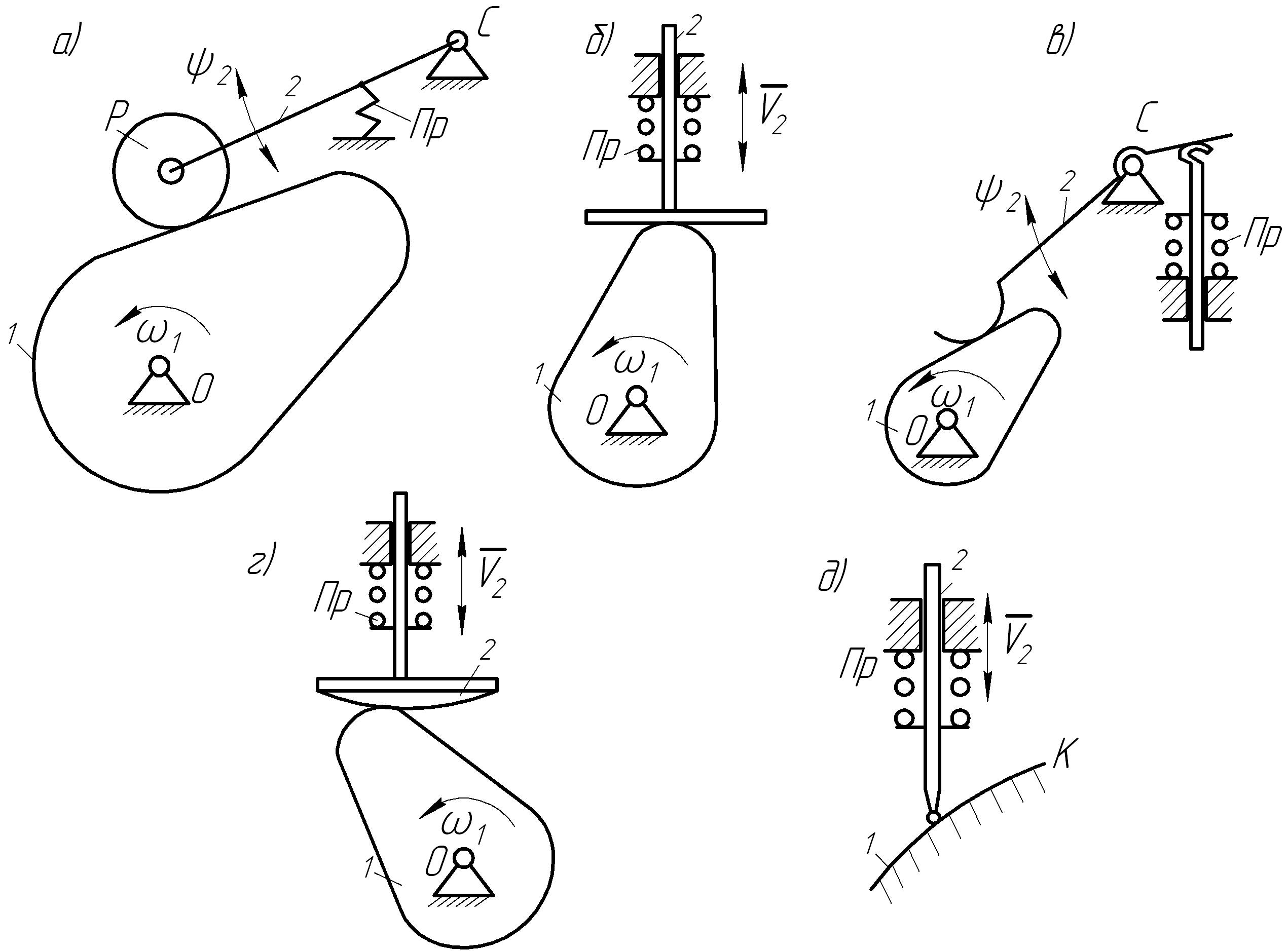
Рис. 15.1. Основные виды толкателей 2:
– роликовый; – тарельчатый плоский; – цилиндрический;
– тарельчатый сферический; – остроконечный сферический.
Выполнение
башмака в виде ролика Р
(на схеме
![]() )
частично исключает трение скольжения,
заменяя его трением качения, уменьшает
износ и повышает надёжность механизма.
Уменьшение износа обеспечивается также
применением для кулачков и башмаков
толкателей: сталей марок 45, 40Х с закалкой
до твёрдостей 52…58HRC;
сталей 15, 20Х, 25ХГ с цементацией и закалкой
до 56…62HRC;
высокопрочных чугунов. При работе
механизма необходим постоянный
контакт кулачка
с башмаком толкателя. Он может
обеспечиваться:
)
частично исключает трение скольжения,
заменяя его трением качения, уменьшает
износ и повышает надёжность механизма.
Уменьшение износа обеспечивается также
применением для кулачков и башмаков
толкателей: сталей марок 45, 40Х с закалкой
до твёрдостей 52…58HRC;
сталей 15, 20Х, 25ХГ с цементацией и закалкой
до 56…62HRC;
высокопрочных чугунов. При работе
механизма необходим постоянный
контакт кулачка
с башмаком толкателя. Он может
обеспечиваться:
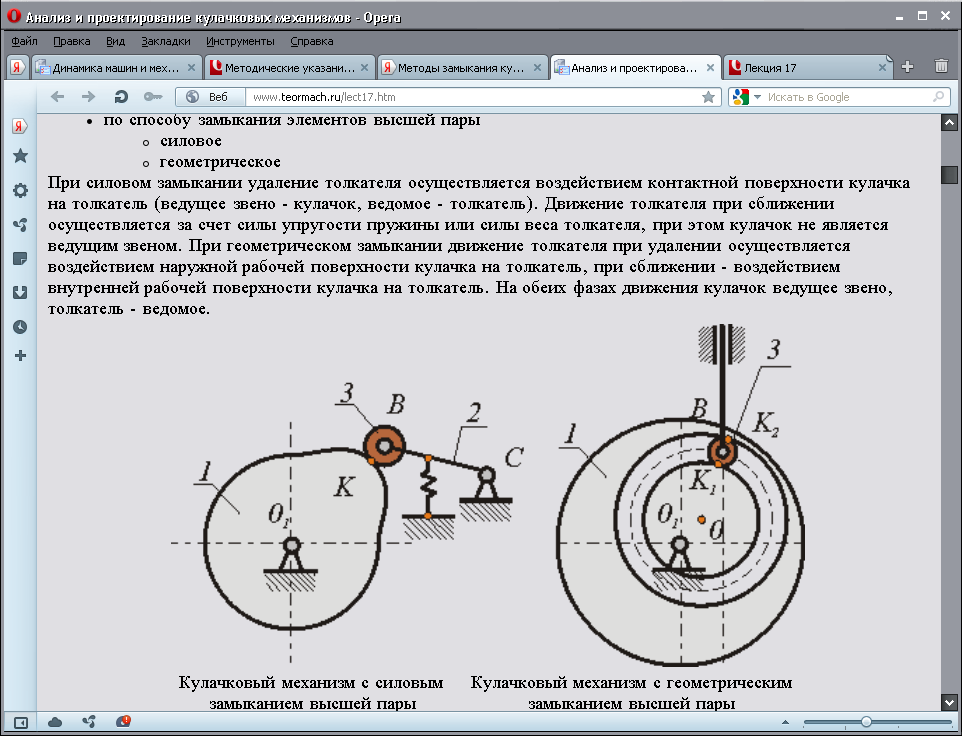
— силовым замыканием кулачковой пары посредством пружины ПР (рис.15.1), давления жидкости или воздуха и т.п.;
— геометрическим замыканием с использованием (рис. 15.2):
) пазового кулачка ) парного кулачка 1 и сдвоенного толкателя 2

41.Планетарные зубчатые механизмы. Выбор схемы, числа сателлитов и чисел зубьев колёс.
Выбор схем планетарных механизмов
Планетарные механизмы позволяют получить большие передаточные отношения, имея при этом значительно меньшие габариты и в 1,5…3,0 раза меньшую массу по сравнению со ступенчатыми механизмами одинакового передаточного отношения.
Заданное передаточное отношение обеспечивается различными существующими схемами планетарных механизмов, но они могут значительно отличаться по КПД, массе и габаритам. По этим качествам простые планетарные механизмы разделяются на две группы:
1. Схемы механизмов первой группы приведены на рис. 14.2. Они выполнены двухрядными, имеют двойные сателлиты 2,3, составлены из колёс однотипного зацепления - только внешнего (схема ) или только внутреннего (схема ).
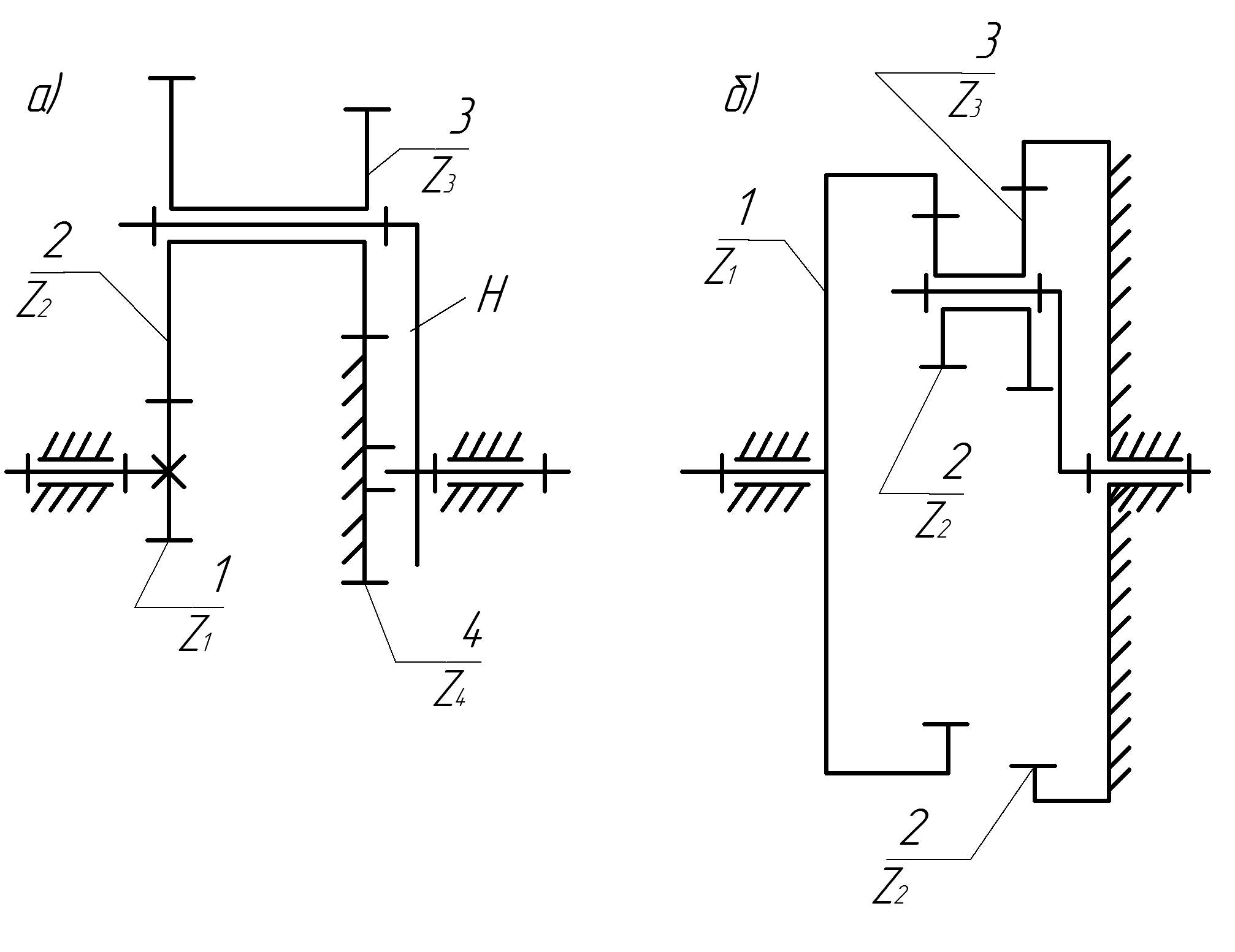
Данные механизмы используются как понижающие передачи (редукторы) с ведущим звеном – водилом Несмотря на большие кинематические возможности, механизмы этой группы целесообразно использовать в случаях, когда полезные нагрузки невелики, так как их КПД небольшой.
2. Схемы механизмов второй группы приведены на рис.14.3. Они составляются обязательно из колёс разнотипного зацепления с двойным (схема ) или одинарным (схема ) сателлитами.
) )

Рис. 14.3.
![]()
![]()
Механизмы второй группы широко применяются в силовых передачах средней и большой мощности, так как имеют высокий КПД. Они выполняются как многосателлитные редукторы, что позволяет значительно снизить их габариты и массу по сравнению с другими видами зубчатых передач одинакового передаточного отношения.
Для получения больших значений передаточных отношений механизмы второй группы применяются в комбинации с простыми зубчатыми передачами, а также в виде многоступенчатых механизмов (рис. 14.4).
Определение числа сателлитов планетарного и дифференциального механизмов.
Планетарные и дифференциальные механизмы выполняются многосателлитными. В существующих конструкциях число сателлитов находится в пределах К=2…12,но чаще всего составляет К=3…6. Наличие нескольких сателлитов позволяет значительно снизить габариты и массу механизма, улучшить его динамику, уравновешивая вращающиеся массы и разгружая опоры центральных колёс и водила.
Целесообразно определить максимально возможное число сателлитов из условия их соседства, т.е. совместного размещения по общей окружности в одной плоскости без задевания друг друга зубьями.
В однорядном механизме (рис.14.7) для выполненеия данного условия находим
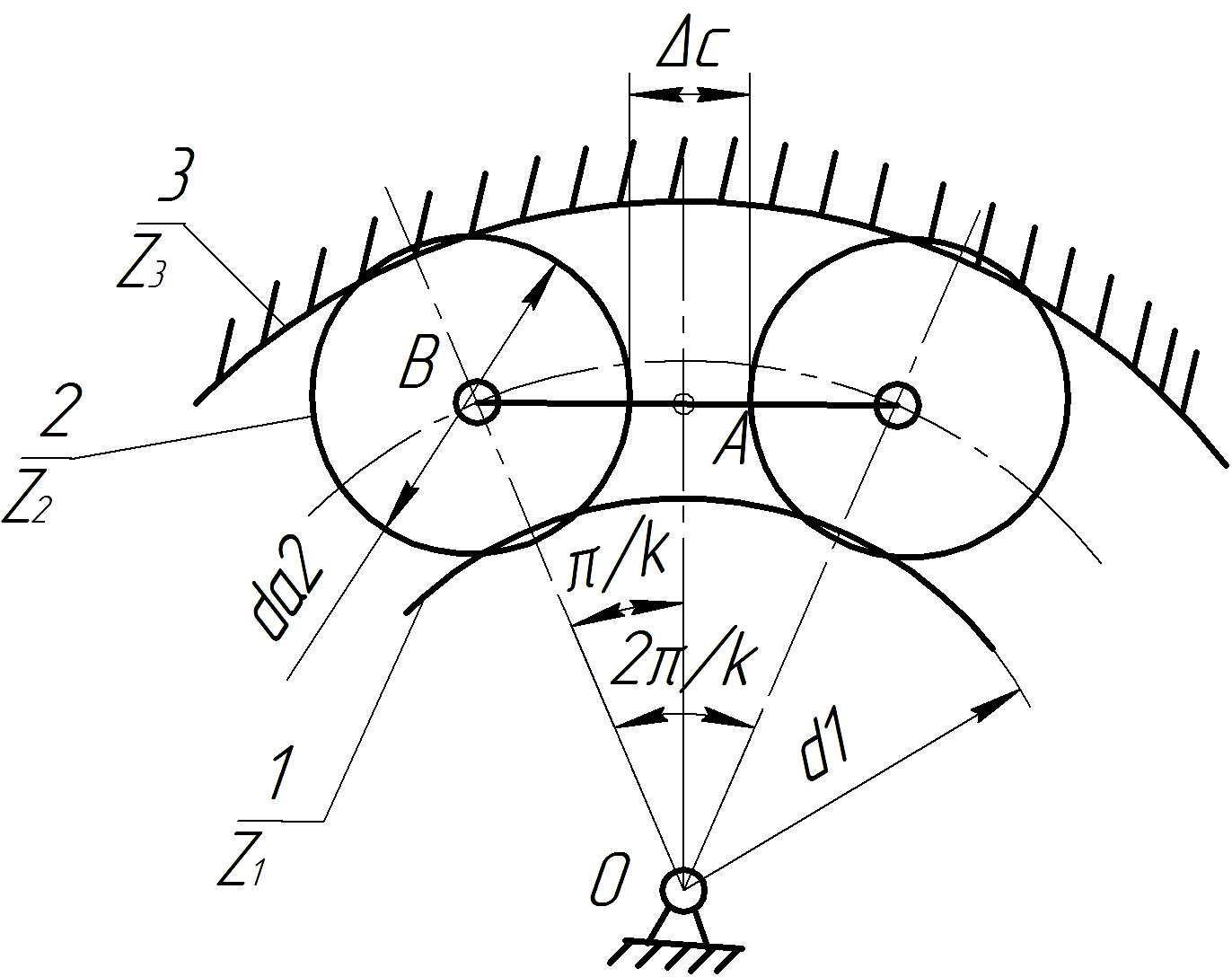
Рис.14.7.
зазор
 ;
;размер
 ;
(14.2)
;
(14.2)для внешнего зацепления колес 1, 2 из

 ;
(14.3)
;
(14.3)
диаметр вершин зубьев колеса 2
![]() ;
(14.4)
;
(14.4)
Подставив выражения (14.3) и (14.4) в уравнение (14.2),получим
 .
(14.5)
.
(14.5)
Аналогично для внутреннего зацепления колес 2, 3 найдем
 .
(14.6)
.
(14.6)
Определение чисел зубьев колес планетарного и дифференциального механизмов.
Важным этапом проектирования механизмов является определение чисел зубьев колес на основе выполнения ряда условий.
1. Обеспечение заданного передаточного отношения с допустимым отклонением ±2% для планетарного механизма.
2. Обеспечение соосности входного и выходного валов , при которой центральные зубчатые колеса и водило должны иметь общую геометрическую ось вращения.
3. Ограничение по числу сателлитов согласно уравнениям (14.5) и (14.6).
4.
Обеспечение сборки (собираемости)
механизма , когда зубья всех К сателлитов
точно войдут во впадины между зубьями
центральных колес при равных углах
между сателлитами
![]() .
.
5. Исключение заклинивания зацеплений и подреза зубьев колес.
Так, для однорядного планетарного механизма, (рис.14.3, б) составленного из эвольвентных прямозубых нулевых колес , указанные условия дают уравнения :
—уравнение передаточного отношения
![]() , откуда находим
, откуда находим
![]() ;
;
—условие
соосности (рис.14.7)
![]() ,
откуда находим
,
откуда находим
![]() ,
,
![]() ;
;
—условие
сборки
![]() - целое число;
- целое число;
—условие соседства (14.5) для нулевых колес (сателлитов) 2
![]() .
.
Из полученных уравнений составим соотношение:
Z1:Z2:Z3:
![]()
Оно
позволяет подобрать числа зубьев колес,
выполнив при этом условия, исключающие
заклинивание зацеплений:
![]() ;
;
![]() ;
;
![]()
![]()
Принятое число сателлитов следует проверить по условию их соседства (14.5) или (14.6).