

22.Уравновешивание вращающихся звеньев механизмов (роторов). Статическая и динамическая балансировка роторов.
Давление ротора на его опоры складываются из двух составляющих:
статической, вызванной действием нагружающих ротор сил;
динамической, обусловленной ускоренным движением материальных частиц ротора.
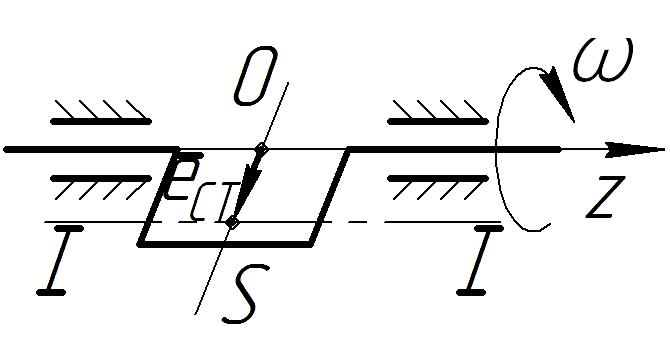
Если динамическая составляющая не равна нулю , то ротор называют неуравновешенным. Рассмотрим схему силовых факторов , действующих на такой ротор Р (рис. 17.4).

Рис. 17.4.
S
– центр масс ротора;
-
масса ротора;![]() -
эксцентриситет массы ротора;
-
эксцентриситет массы ротора;
![]() -
центростремительное ускорение ротора.
-
центростремительное ускорение ротора.
1.
Главный вектор центробежных сил инерции
ротора
![]() ,
модуль которого
,
модуль которого
![]() .
.
2. Модуль главного момента центробежных сил инерции ротора
![]() ,
где
,
где
![]() ,
,
![]() -
центробежные моменты инерции ротора.
-
центробежные моменты инерции ротора.
Силовые
факторы
![]() и
и
![]() вызывают циклически изменяющиеся
динамические давления на опоры А
и В
ротора, вибрацию опор и основания.
Устранение этого вредного воздействия
называют балансировкой
(уравновешиванием) ротора.
вызывают циклически изменяющиеся
динамические давления на опоры А
и В
ротора, вибрацию опор и основания.
Устранение этого вредного воздействия
называют балансировкой
(уравновешиванием) ротора.
В технике за количественные характеристики неуравновешенности роторов принимают:
 -
главный вектор дисбалансов ротора
-
главный вектор дисбалансов ротора
![]() ;
;
 -главный
момент дисбалансов ротора.
-главный
момент дисбалансов ротора.
Различают следующие виды неуравновешенности роторов:
1. Статическая неуравновешенность, характеризуемая параметрами:
![]() ,
,
![]() ;
;
![]() ,
,
![]() ,
,
![]() .
.
Главная центральная ось инерции I-I ротора Р проходит через центр S его массы и параллельно оси вращения OZ.
2. Моментная неуравновешенность, характеризуемая параметрами :
![]()
Ось I-I проходит через центр S массы ротора, и наклонена к оси вращения SZ

3. Динамическая неуравновешенность, характеризуемая параметрами:
![]()
Ось I-I проходит через центр S массы ротора, смещенной на величину lСТ от оси вращения и наклонена к этой оси.
Статическая балансировка роторов.
Статическую неуравновешенность можно обнаружить статическим испытанием ротора, например, на балансировочном устройстве СБС-4а с треугольными направляющими (НП) (рис.17.5)
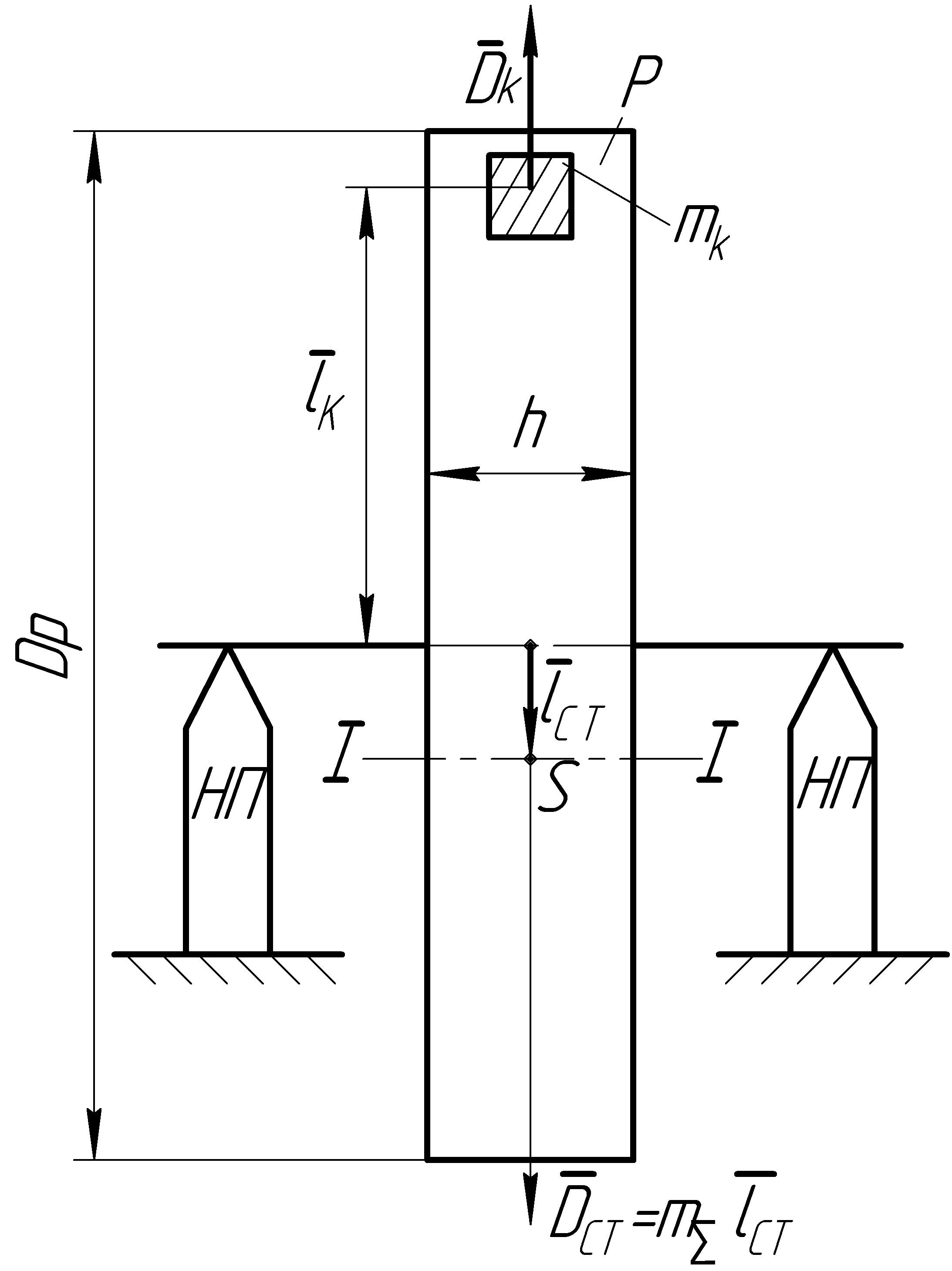
Рис.17.5.
На
устройстве центр масс S
займет самое нижнее положение. Для
балансировки на роторе Р
закрепляют корректирующую массу
![]() так , чтобы выполнялось условие:
так , чтобы выполнялось условие:
![]()
Статическая
балансировка целесообразна только для
коротких роторов с
![]() (зубчатые колёса, шкивы и т. п.).
(зубчатые колёса, шкивы и т. п.).
Динамическая балансировка роторов
Динамическая
неуравновешенность характерна для
длинных роторов с
![]() и выражается величинами
и выражается величинами
![]() и
и
![]() .
Она эквивалента двум скрещивающимся
векторам дисбалансов
.
Она эквивалента двум скрещивающимся
векторам дисбалансов
![]() и
и
![]() (“кресту дисбалансов”). Их расположим
в двух корректирующих плоскостях
(“кресту дисбалансов”). Их расположим
в двух корректирующих плоскостях
![]() и
и
![]() и отнесём к двум условным точечным
массам
и отнесём к двум условным точечным
массам
![]() и
и
![]() (рис.17.6).
(рис.17.6).

Рис.17.6.
Балансировку
осуществляем постановкой двух
корректирующих масс
![]() и
и
![]() ,
выбирая их из условий равенства векторов:
,
выбирая их из условий равенства векторов:
![]() ;
;
![]() .
.
В
результате главная центральная ось
инерции
![]() ротора совмещается с осью Z
его вращения. Балансировку проводят на
специальных станках с электронными
счётно-решающими устройствами.
ротора совмещается с осью Z
его вращения. Балансировку проводят на
специальных станках с электронными
счётно-решающими устройствами.
По
ГОСТ остаточный эксцентриситет
![]() ротора
зависит от его веса и частоты вращения
ротора
зависит от его веса и частоты вращения
![]() .
Для электрических машин
.
Для электрических машин
![]() =8…4
мкм при
=8…4
мкм при
![]() .
.