

12. Система генератор-двигатель (г-д).
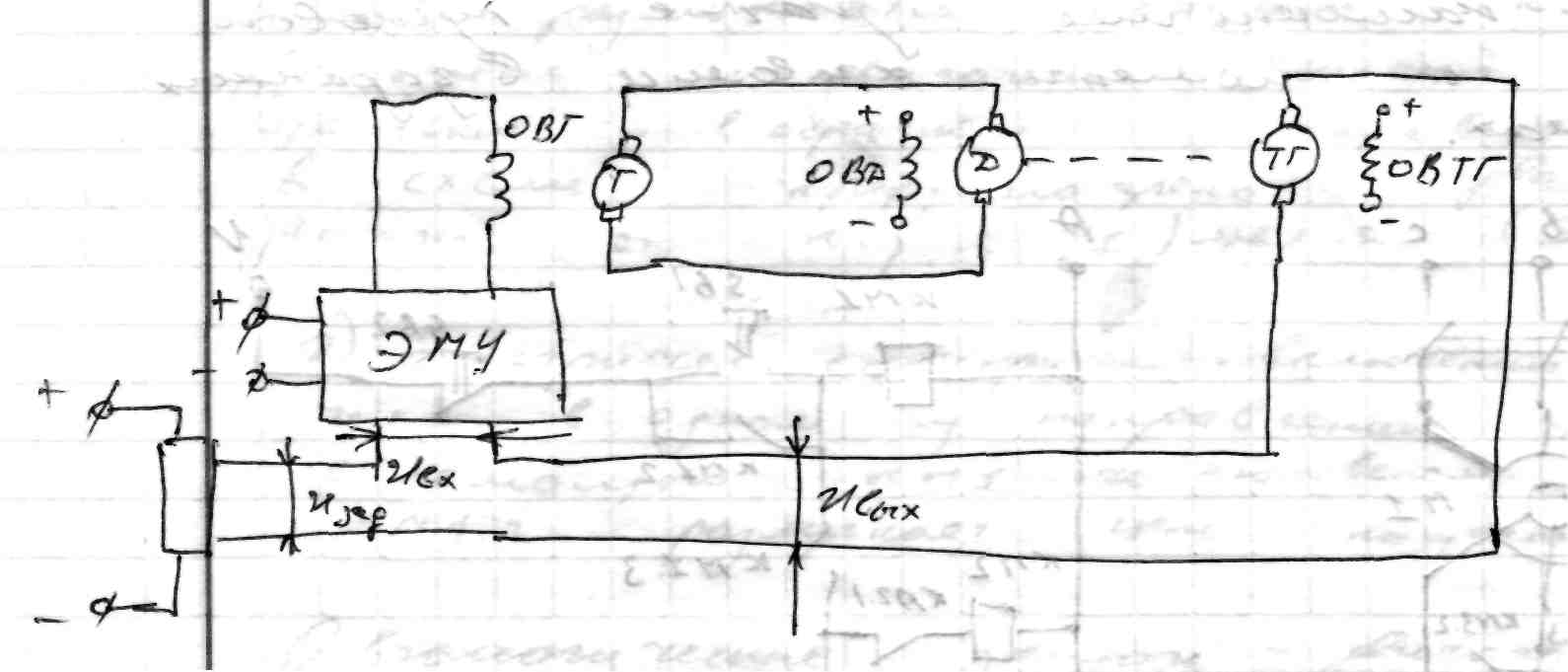
ТГ – тахогенератор.
ЭМУ – электромеханический усилитель.
Для осуществления автоматического регулирования прежде всего необходимо измерить регулируемую величину, для этого служит тахогенератор, затем этот результат измерения Uвых сравнивается с заданной величиной Uзад, и разница передается для воздействия на регулирующий орган, обычно эта разница оказывается недостаточной для воздействия на регулирующий орган и поэтому в схему необходимо введение усилительных и преобразовательных органов.
Измерительный орган, усилитель, регулирующий орган входят в устройство регулятора, осуществляющего процесс регулирования. Система автоматического регулирования характерна наличием обратных связей, кроме того могут быть внутренние обратные связи. Внутренняя ОС соединяет вход и выход только отдельных элементов.
Автоматическое регулирование в схеме достигается следующим образом: предположим что нагрузка на валу двигателя увеличивается, тогда скорость его и напряжение тахогенератора уменьшается, а напряжение на входе усилителя расчет, что приводит к повышению напряжения на якоре двигателя. А следовательно к поддержанию его скорости. Чем больше коэффициент усиления усилителя, тем точнее поддерживается скорость на заданном уровне.
13. Математическое моделирование аэп.
Из всех программ следует отметить Матлаб в которой имеется среда объектного визуального моделирования Simulink.
Достоинства:
- прозрачность реалезования модели т.к. все составляющие (блоки) соединены м/у собой линиями связи с указанием направления или специальными блоками в результате которых модель представляет собой структурную схему. Модель может иметь иерархическую структуру, т.е. состоять из моделей более низкого уровня. Состав библиотеки может быть пополнен пользователем новыми библиотеками.
Результаты моделирования представляются графическим (при необходимости цифровым) способом посредством раскрывающегося окна. Вид математической модели отображает следующие результаты моделирования: силу развиваемую Двигателем, ускорение, скорость. Общность физических явлений позволяет при выводе уравнения ЛАД взять за основу известную систему дифференциальных уравнений Парка-Горева для двигателя вращательного движения /3/. Система осей - O,X,Y, движущаяся в пространстве с синхронной скоростью, предпочтительна для исследования как установившихся, так и переходных режимов асинхронных машин, имеющих электрическую и магнитную симметрию. В этой системе координат преобразуются контуры индуктора и вторичного элемента. Уравнения Парка-Горева, записанные для ЛАД в системе координатных осей O,X,Y, имеют следующий вид:
где: UX1, UY1 – напряжение индуктора по осям OX, OY;
- полюсное деление обмотки ЛАД;
Xs=X1+Xm, Xr=X2+Xm – значения сопротивлений, вводимых в модель;
R1, X1, R2, X2 – соответственно активное и реактивное сопротивления индуктора и вторичного элемента, приведенные к обмотке индуктора;
Xm – сопротивление взаимоиндукции между индуктором и вторичным элементом;
V0 – синхронная скорость двигателя;
X1,Y1,X2,Y2 – потокосцепления по осям OX, OY соответственно индуктора и вторичного элемента;
V – скорость движения вторичного элемента;
0 - угловая частота питающей сети;
F – сила, развиваемая ЛАД;
FC1 - суммарная сила сопротивления КЛАПВ;
m – масса вторичного элемента.