

40.Асинхронный электропривод с тиристорным регулятором напряжения.
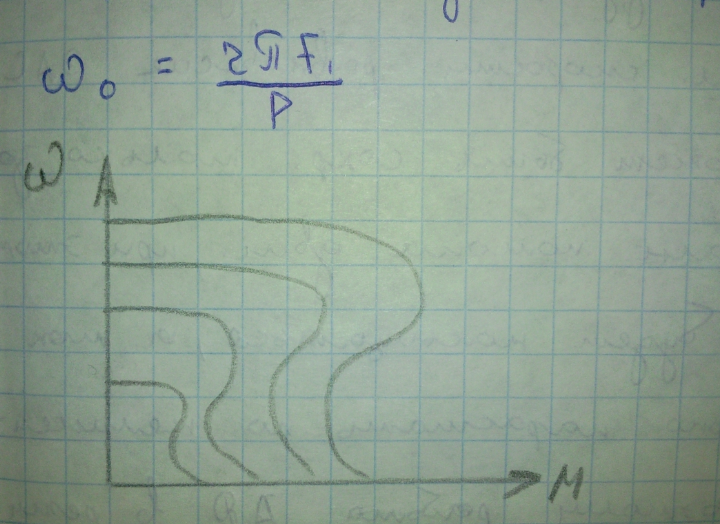
Изменение напряжение на обмотке статора АД приводить к изменению мах. Момента
W




S1 Mmax
S2
S3
М
А )

r1,r2-активное сопротивление статора и приведенное активное сопротивление ротора
х1,х2-индуктивное сопротивление статора и приведенное активное сопротивление ротора
П



 о
мере снижение напряжение статора угловая
частота ротора при постоянном моменте
сопротивление уменшается, однако как
отмечалось ранее по мере снижение
напряжения снижается и магнитный момент
двигателя поэтому при постоянном моменте
нагрузки МS
диапозон регулирования ограничен.
о
мере снижение напряжение статора угловая
частота ротора при постоянном моменте
сопротивление уменшается, однако как
отмечалось ранее по мере снижение
напряжения снижается и магнитный момент
двигателя поэтому при постоянном моменте
нагрузки МS
диапозон регулирования ограничен.
Мс=const
Б)
В двигателях с постоянном активном сопротивление ротора диапозон регулирования расширяется(рис б).Ухудшение работы двигателя обеспечивается тем что заданном скольжении ток двигателя пропорционален напряжению питания, а электромагнитный момент зависит от квадрата этого напряжения.
41.Частотный вентильный асинхронный эл. Привод
Регулирование скорости АД изменен. Частоты питающего напряжения наиболее перспективно и широко использ. в настоящее время.Принцип его закл-ся в том, что при изменении частоты питающего напр. можно изменить скорость идеального ХХ
Регулирование F1 можно получать различные искусственные характеристики. Частотный способ обеспечивает плавное регулирование скорости в широком диапазоне, высокую жесткость получаемых механических характеристик. Регулирование скорости АД не сопровождается увеличением его скольжения, поэтому потери мощности при регулировании скорости оказывается небольшим
U1=E1= 1*K0*f1*Ф
(1)
1*K0*f1*Ф
(1)
Пренебрегая падением напряжения в первичной цепи можно записать, что подводимое напр. двиг. уравнов. к ЭДС двиг.
W1- число витков фазы обмотки статора
К0- обмоточный коэф-т
Ф- магнитный поток в воздушном зазоре двигателя.
Из выражения (1) следует, что при изменении частоты с целью регулирования скорости равновесие ЭДС и напряжения сети может быть сохран. только за счет увеличения магнитного потока двигателя, при этом магнитная цепь будет насыщаться, а ток статора интенсивно нарастать по нелинейному закону. Поэтому работа АД в режиме частотного управления при неизменном напряжении оказывается невозможным.
42 Асинхронный электропривод с импульсным регулированием добавочного сопротивления
Асинхронный ЭП с импульсным регулир. Добавочного сопротивления.
При импульсном регулирование скорости АД с коммутацией в цепи фазного ротора возможно вкл. Терристоров как в цепь переменного тока так и в цепь выпрямленного тока. Преимуществом вкл. Терристоров в цепь выпрямленного тока явл. Меньшее их количество и значит упрощение схемы управления, поэтому они представл. Большой интерес. По существу имеет место реостатного регулирования отличное от обычного плавностью регулир. Большим диапазоном регулир. Высоким быстродействием и возможностью получ. Харак. Желаемой формы
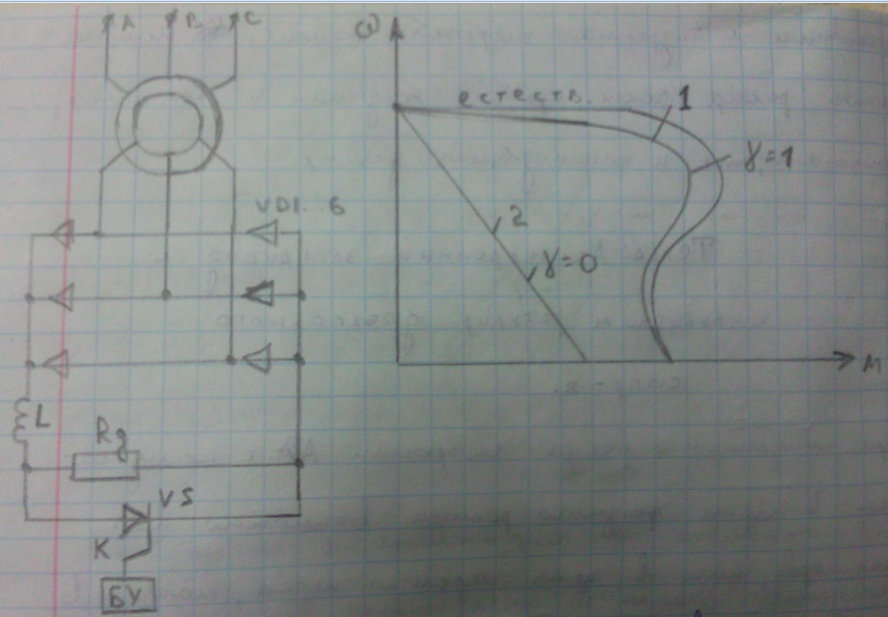
Дополнительный резистор Rд вкл. В роторную цепь через не управляемый выпрямитель для уменьшения пульсации выпрямителя тока послед. С резисторами вкл. Реактор L , паралелльно резистору вкл. Управл. Ключ построенный на терристоре VS при подаче сигнала управл. На терристор он открывается и замыкает накоротко Rд. Rд =0 и двиг. Работает на харак. 1, если терристор закрыт то двиг. Работает по харак. 2. Соответ. Вкл. В каждую фазу ротора добавочного резистора.
Среднее сопротивлении определ.
 =
=
Коммутация ключа К обычно осущ. Таким образом чтобы период комут. Т остается не измен а измен. Лишь соотношения времени вкл. И выкл. Сост. Терристора. Таким образом измен.относит вкл. Время ключа при периоде его коммут. Можно измен. Эквивал. Добавочное сопротивление в цепи от 0 при Υ=0 до Rд. это позвол. Получить семейство мех. Харак. АД при разных знач. Слвфжности Υ которые располог. Между крайней пограничной харак. 1-2 недостатком импульсного регулир. Сопрот. Так же как и ступенчатого явл. Увелич. Потерь энергии в ЭД по мере снижения скорости