

29. Автоматическое регулирование угловой скорости асинхронных эп при помощи тиристорных регуляторов напряжения.
Напряжение открывания тиристора зависит от величины управляющего сигнала. Это св-во часто используется для выбора момента перевода тиристора в проводящее состояние. Угол альфа – называют углом управления (открывания). Пока тиристор закрыт сетевое напряжение приложено к тиристору, напряжение на нагрузке равно нулю.
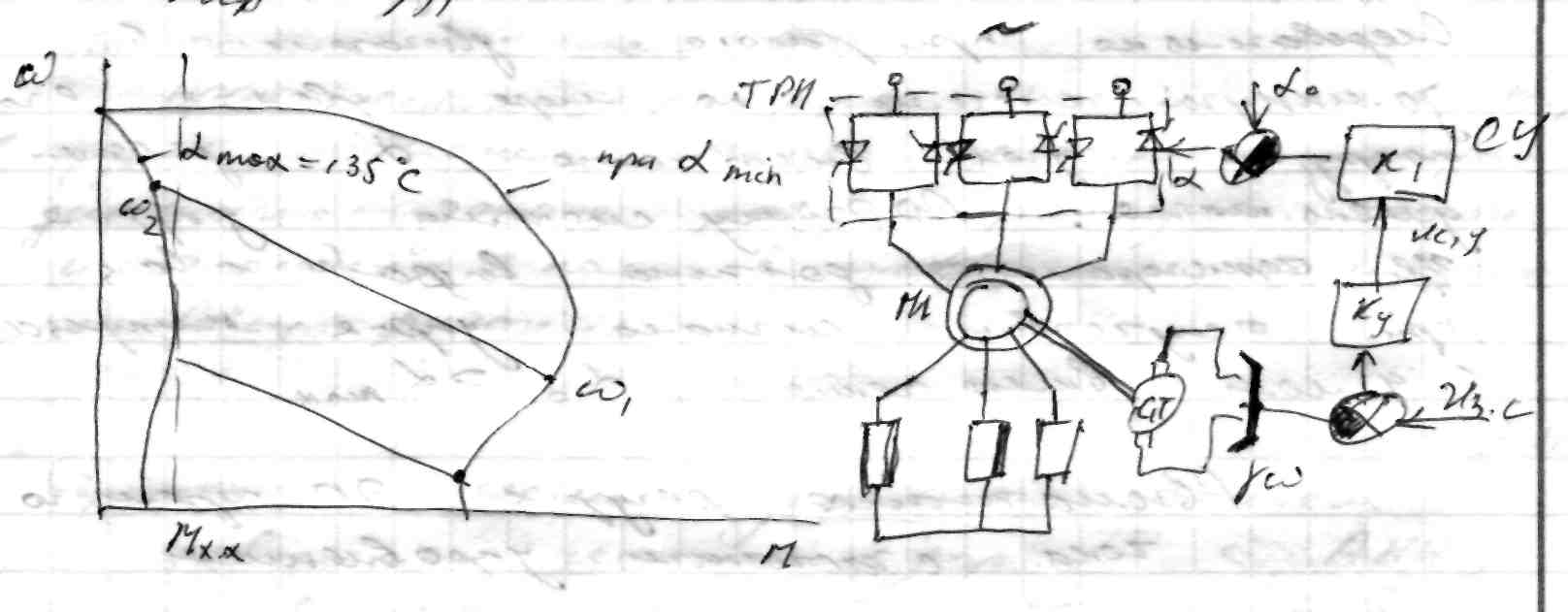
Несмотря на то что в разомкнутой системе АД не может работать на неустойчивой части механической характеристики, а в замкнутой системе автоматического регулирования АД м-т работать устойчиво, обеспечивая плавное регулирование угловой скорости, при увеличении нагрузки на валу двигателя угол открывания тиристора будет уменьшаться. Регулирование напряжения на статоре АД производится тиристорным регулятором напряжения ТРН. Угол альфа задается системой управления СУ. На вход СУ подается сигнал от усилителя U. Этот сигнал зависит от разности задающего напряжения Uз и напряжения ООС по скорости, снимаемый с выхода ТГ. Напряжение ОС равно произведению гамма на угловую скорость. Где гамма – коэффициент передачи ТГ. Одна из этих характеристик соответствует минимальному углу включения тиристоров равному фазовому углу, нагрузки (фи). Другая характеристика соответствует наибольшему углу включения альфа=135. При таком угле момент развиваемого двигателем обычно меньше статического х.х. двигателя при работе двигателя в замкнутой системе, по мере увеличения его нагрузки, угол включения альфа должен уменьшатся. Поэтому система управления тиристорами должна вырабатывать, при отсутствии сигнала управления, импульсы с углом включения альфао>альфамах
30. Сравнительная характеристика типов регулируемых асинхронных электроприводов
№ |
Типы ЭП (Ад) |
Диапазон регулирования |
Точность поддержания заданной скорости,% |
Стоимость ЭД и регулирования в относительных единицах |
1 |
АД с ЭМС |
1…8 |
-+ 2% |
13 |
2 |
С тиристорным преобразователем частоты |
1…400 |
-+ 1% |
120 |
3 |
С тиристотным регулятором напряжения |
1…10 |
-+ 2% |
30 |
4 |
С переключением числа пар полюсов |
1…3 |
-+ 0,5% |
4 |
31Выбор эп и принцип управления лифтом.
На выбор типа ЭП существенно влияет: - кинематическая схема; - требования по времени движения кабины; - ограничение на ускорение и рывки.
Режим работы ЭП характеризуется частыми режимами включения и отключения.
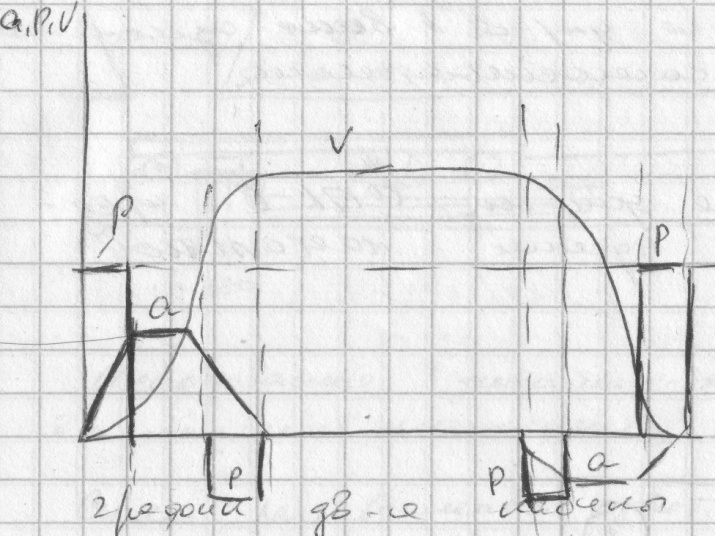
При этом можно выделить следующие этапы движения:
- разгон ЭД до установившейся скорости;
- движение с установившейся скоростью;
- уменьшение скорости при подходе к этажу назначения;
- торможение и остановка кабины.
Необходимость ограничения ускорений и рывков и обеспечение максимальной производительности требует, чтобы во время переходных процессов ЭП обеспечивал разгон и замедление кабины с максимально допустимыми значениями ускорения и рывка.
В механизмах подъема применяются различные типы ЭП.
В нерегулируемом приводе используют одно-, двухскоростные двигатели переменного тока. Односкоростной нерегулируемый асинхронный привод применяется в тихоходных лифтах с невысокими требованиями точности остановки кабины, т.е. изменение в направлении движения изменяется чередованием фаз.
В двухскоростном асинхронном приводе также используется АД с к.з. ротором с двумя статорными обмотками (изменением числа пар полюсов).
Применение регулируемых приводов переменного тока позволяет существенно стабилизировать диаграмму движения, т.е. исключить неоднородность диаграмм движения при изменении загрузки кабины и поддерживать заданное ускорение кабины в режимах разгона, замедления и торможения.