27. Автоматическое регулирование момента эп в системе преобразователь-двигатель.
Для автоматического регулирования момента привода ДПТ НВ может быть использована так называемая не линейная жесткая обратная отрицательная связь по току, или связь с отсечкой.
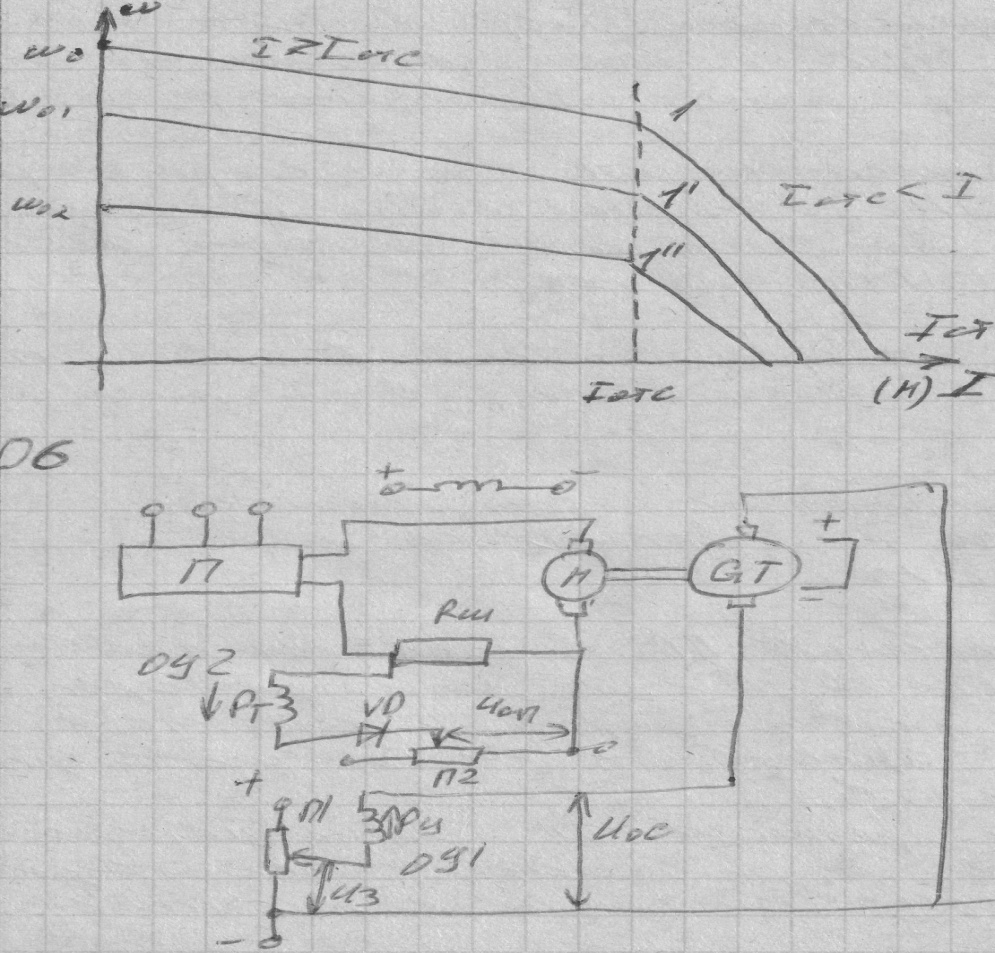
ООС действует по скорости на первом участке МХ ЭД , когда ток нагрузки не достигает тока отсечки (I меньше Iотс) и на 2-ом , при I больше Iотс.
ООС по току с отсечкой начинает действовать тогда , когда ток якоря ЭД превышает ток отсечки. Вступая в действие эта ОС позволяет обеспечить в системе с опреленной точностью поддержания пост-во тока или напряжения.
Преобразователь П имеет 2 обмотки управления:
1) обмотка управления ОУ1 сигнал, которой пропорционален разности Uз и Uос снимаемого с генератора GT.
2) ОУ2 включенная через диод VD на разность опорного напряжения UОП снимаемого с потенциометра П2 и падения напряжения на шунте Rш пропорционально току якоря ЭД.
Разность этих напряжений при протекании тока больше чем ток отсечки создает МДС направленную встречно МДС первой обмотки Fу.
При токах меньших тока отсечки в обмотке ОУ2 ток не протекает (VD – закрыт и соот-им образом подобранного Uоп.).
По мере увеличения Iн угловая скорость падает. Уменьшается напряжение обратной связи , напряжение на ОУ1 возрастает частично компенсируя падение угловой скорости. При токе больше тока отсечки появляется напряжение на обмотке ОУ1. Это напряжение вызывает размагничивающий сигнал и результирующая МДС падает.

Что приводит к резкому падению ЭДС преобразователя и угловой скорости.
При не подвижном состоянии ЭД по его якорной цепи протекает ток стопарения (Iотс) ,а результирующая ЭДС преобразователя равна произведению Iст на сопротивление цепи преобразователь-двигатель.
На 2-ом участке харак-ки в месте с ООС по угловой скорости действует ООС по току.
В этом случае результирующий сигнал выраженный через параметры схемы управления можно записать следующим образом:

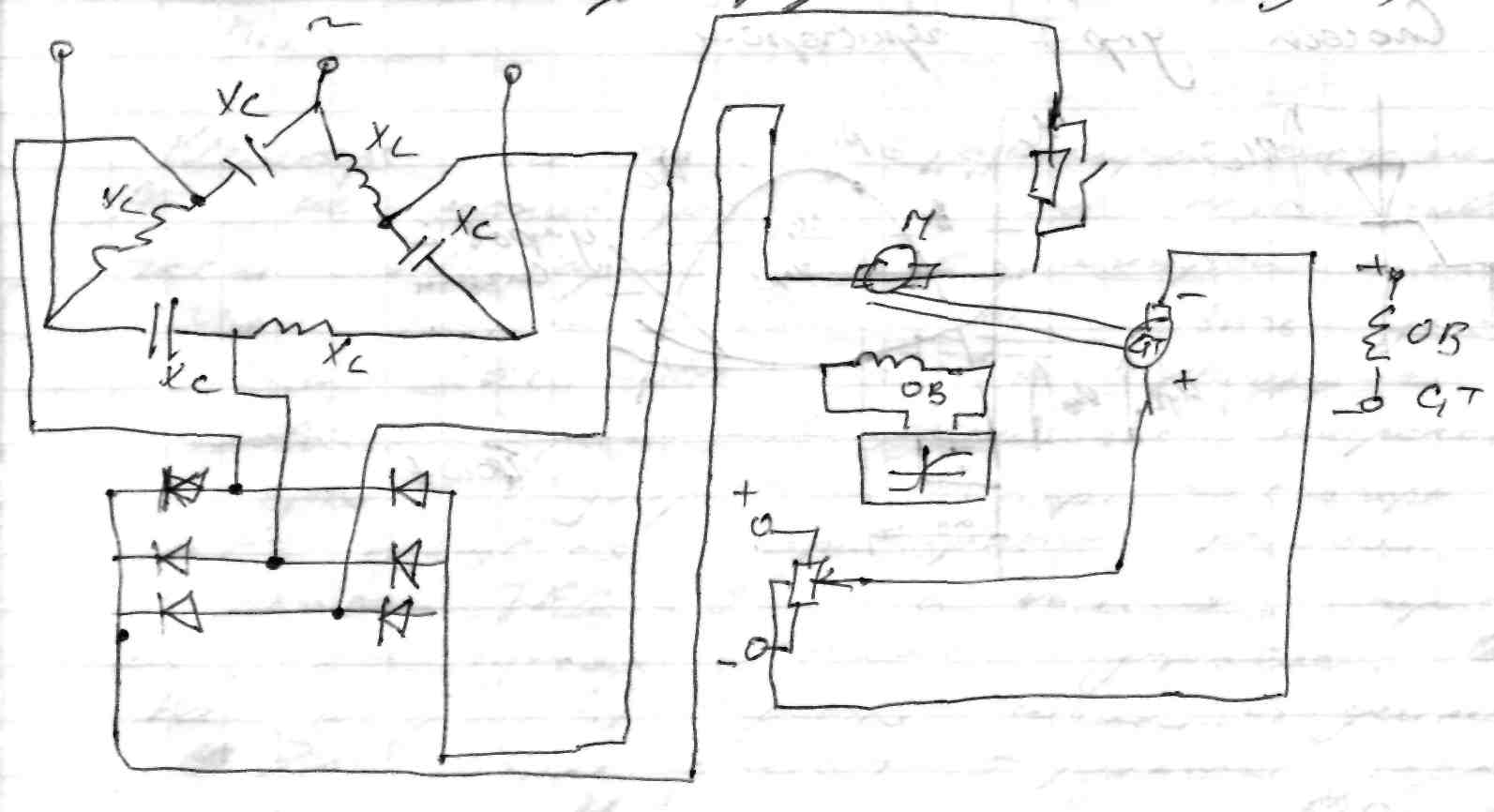
28. Автоматическое регулирование скорости и момента в системе «источник тока-двигатель».
Рассмотрим схему Автоматическое регулирование скорости и момента c питанием якорной цепи от источника тока, в котором задан ток независящий от ЭДС и сопр-я нагрузки. Обмотка возбуждения двигателя получает питания от источника регулируемого напряжения с возможностью изменения полярности. Механические характеристики такого привода представляют собой вертикальные линии, т.е.являются абсолютно мягкими.
М=kIФ=kФ
Применение обратной связи в схеме источник тока – двигателя.
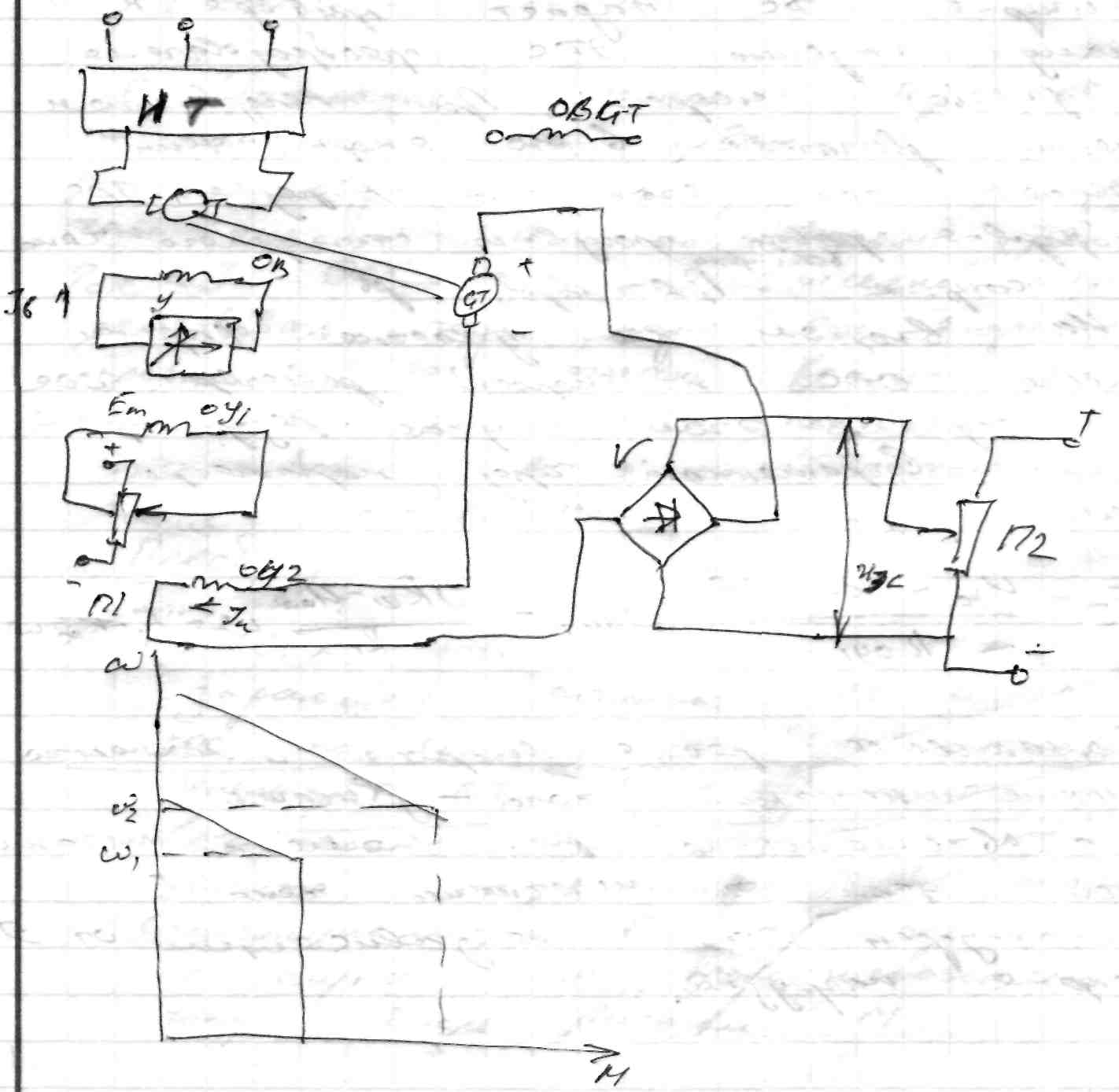
Обмотка якоря подключена к источнику тока ИТ, а обмотка возбуждения подключена к усилителю с линейной характеристикой, на входе которого 2 обмотки управления: ОУ1 получает питание от потенциометра П1 и предназначена для создания сигнала, пропорционального потоку Fм=Iм*wм, т.е. обмотка задается момент . Другая обмотка ОУ2 присоединена к ТГ GT через потенциометр П2. и выпрямитель V так, что сигнал пропорционально скорости появ-ся на ней тогда, когда Етг>Uз . Меняя с помощью потенциометра П2 задающее напряжении можно регулировать уставку отсечки обр. связи по скорости.
Наиболее простое устройство работающее в режиме источника тока это индуктивно - емкостной преобразователь