21. Одноконтурные и многоконтурные сар
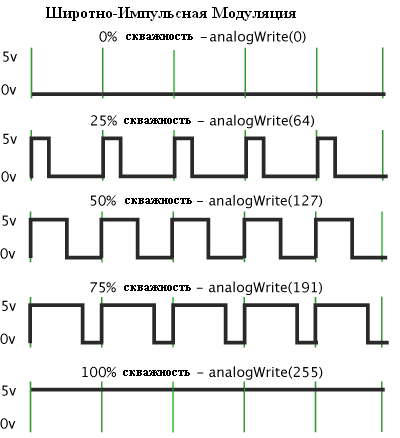
Применим показанные выше приемы для вычисления передаточных функций рассмотренной выше системы. Здесь три входа (х, д и т), а в качестве выходов обычно рассматривают выход системы у, сигнал управления и и ошибку е. Таким образом, всего можно записать 9 передаточных функций, соединяющих все возможные пары вход-выход.
Сначала найдем полную передаточную функцию привода (обведенного штриховой рамкой), используя формулу для контура с отрицательной обратной связью:

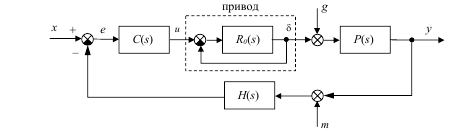
Получаем следующую схему:
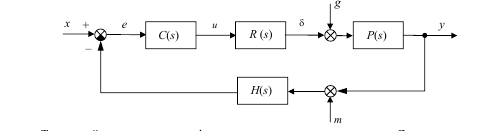
Теперь найдем передаточные функции от входа Х ко всем выходам. Для этого все остальные входы будем считать нулевыми и удалим со схемы. Кроме того, заменим последовательное соединение звеньев с передаточными функциями С (s), R(s) и Р( s) на одно звено:
Для получения окончательного результата снова используем формулу для контура с отрицательной обратной связью:

Принимая в качестве выходов управление и и ошибку е, получим похожие схемы:

Первая из этих схем дает передаточную функцию по управлению Wи (s), а вторая - передаточную функцию по ошибке Wе (s) (здесь блок с передаточной функцией, равной единице, можно
было вообще не рисовать). Снова применяя формулу для контура с отрицательной обратной связью, получаем:
![]()
![]()
22. Широтно-импульсная модуляция (шим)
Для обеспечения высокого качества электрической энергии на входе и (или) выходе таких преобразователей применяют различные виды широтно-импульсной модуляции (ШИМ).
При широтно-импульсной модуляции в качестве несущего колебания используется периодическая последовательность прямоугольных импульсов, а информационным параметром, связанным с дискретным модулирующим сигналом, является длительность этих импульсов. Периодическая последовательность прямоугольных импульсов одинаковой длительности имеет постоянную составляющую, обратно пропорциональную скважности импульсов, то есть прямо пропорциональную их длительности. Пропустив импульсы через ФНЧ с частотой среза, значительно меньшей, чем частота следования импульсов, эту постоянную составляющую можно легко выделить, получив постоянное напряжение. Если длительность импульсов будет различной, ФНЧ выделит медленно меняющееся напряжение, отслеживающее закон изменения длительности импульсов. Таким образом, с помощью ШИМ можно создать несложный ЦАП: значения отсчётов сигнала кодируются длительностью импульсов, а ФНЧ преобразует импульсную последовательность в плавно меняющийся сигнал.
ШИМ использует транзисторы (могут быть и др. элементы) не в линейном, а в ключевом режиме, то есть транзистор всё время или разомкнут (выключен), или замкнут (находится в состоянии насыщения). В первом случае транзистор имеет бесконечное сопротивление, поэтому ток в цепи не течёт, и, хотя всё напряжение питания падает на транзисторе, в абсолютном выражении выделяемая на транзисторе мощность равна нулю. Во втором случае сопротивление транзистора крайне мало, и, следовательно, падение напряжения на нём близко к нулю — выделяемая мощность также мала.
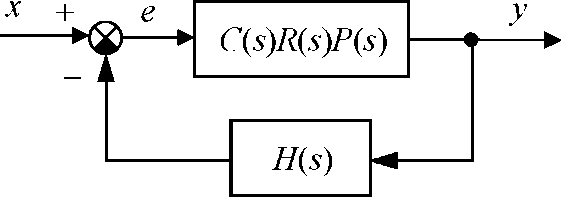
ШИМ есть импульсный сигнал постоянной частоты и переменной скважности, то есть отношения длительности импульса к периоду его следования. С помощью задания скважности (длительности импульсов) можно менять среднее напряжение на выходе ШИМ.
ШИМ (Широтно-Импульсная Модуляция
— импульсный сигнал постоянной частоты и переменной скважности (отношение длительности импульса к периоду его следования). С помощью задания скважности можно менять среднее напряжение на выходе ШИМ.
Т.е. хоть мы и работаем с цифровым устройством, которое понимает только 1 и 0 (высокий уровень напряжения +3..+5V (HIGH) и низкий уровень напряжения 0..+2V (LOW)), но мы всё же можем получить напряжение отличное от данных изменяя скважность импульсов. Другими словами – получаем аналоговый сигнал цифровыми методами.