

6. Зона не чувствительности статической характеристики
Статическая характеристика изображена на рис. 1.13, б.
Здесь Ео к Ео — заданная и действительная ЭДС преобразователя; С/н — напряжение преобразователя при токе нагрузки Ги. Свойство статической системы — работа с остаточным отклонением, поэтому ЭДС преобразователя Е0 при отсутствии нагрузки отличается от заданного значения ЭДС Eq = "3/fe0.н-
Статическая точность, или стабильность, системы характеризуется величиной статизма, под которым понимают отношение отклонения регулируемой величины от заданной при нагрузке к заданному значению регулируемой величины.
Обозначим: Е0 = xq; Eq = Xq ; UB = xH; AUa = Дя:н — падение регулируемой величины в замкнутой системе, соответствующее нагрузке (в рассматриваемом случае падение напряжений в цепи преобразователя). В соответствии с определением статизм системы
7. Следящая система
Следящие системы характеризуются тем, что задаваемый закон изменения выходной координаты является случайной функцией времени. Так, антенна радиолокатора поворачивается, следуя за движением самолета, маневр которого носит случайный характер и заранее не определен.
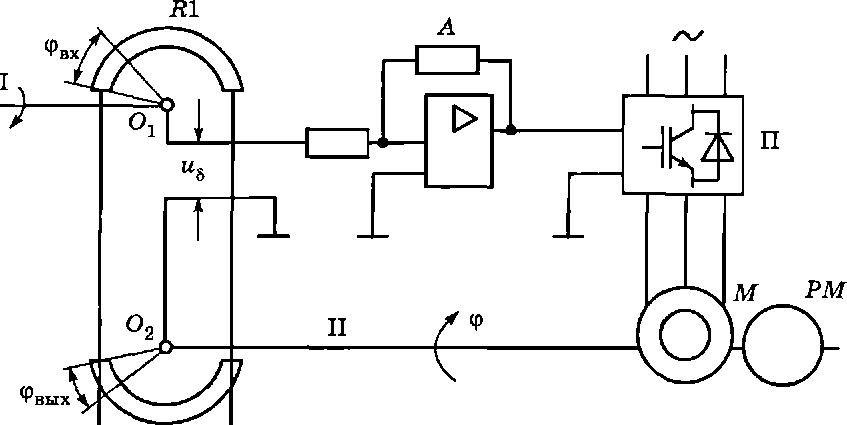
Примером следящей системы может служить следящий электропривод, представляющий САУ, которая с определенной степенью точности воспроизводит заданное движение путем слежения за движением задающего органа. При этом система отрабатывает заданное перемещение в функции рассогласования заданного и действительного положений рабочего органа (регулирование по отклонению). В следящем устройстве (рис. 1.9), состоящем из потенциометрического измерительного устройства R1-R2, преобразователя П, двигателя М и механизма РМ, потен- циометрическое устройство питается от источника постоянного тока с напряжением U. При повороте задающей оси I потенциометра R1 его ползунок повернется на угол <рвх, отличный от угла Фвых» определяемого положением ползунка потенциометра R2, связанного с исполнительной осью II. Вследствие возникновения угла рассогласования (ошибки) 6 = фвх — <рвых между точками Oi и О2 появится разность потенциалов которая пропорциональна этому углу, и через усилитель А поступает на вход преобразователя П. На выходе П появляется напряжение, пропорциональное углу рассогласования, и двигатель М начинает вращаться, поворачивая ползунок R2 в сторону уменьшения угла рассогласования 6. При 6 = 0 (фвх = фвых) двигатель остановится. Ось двигателя повернется на угол фвых относительно начального положения, а механизм отработает заданное угловое перемещение.
8. Разомкнутая система управления
Автоматическое управление с разомкнутой цепью воздействий характеризуется функциями управления, которые не ставятся в зависимость от действительного хода производственного процесса и выполняются по разомкнутому циклу с целью получения определенного конечного результата (например, пуск, реверс и останов двигателя) либо жесткой последовательности смены состояний (например, программное управление перемещением с применением шагового двигателя).
В разомкнутой САУ для управления используется только априорная (начальная) информация об объекте. На рис. 1.1, а показана функциональная схема простейшей разомкнутой системы. Функциональная схема состоит из функциональных элементов и показывает целенаправленную взаимосвязь между этими элементами, воздействиями и координатами системы. Функциональный элемент представляет конструктивно обособленную часть САУ, выполняющую определенные функции. На вход системы подается задающее воздействие иа, которое преобразуется управляющим устройством УУ в управляющее воздействие и. Под действием управления изменяется состояние объекта ОУ, характеризуемое координатой (выходной величиной) у.
Наличие возмущающих воздействий F приводит к тому, что действительное значение управляемой координаты у отличается от желаемого, т.е. появляется ошибка, которая может быть достаточно велика. Для ее уменьшения применяются разомкнутые системы с регулированием по возмущению (рис. 1.1, б).
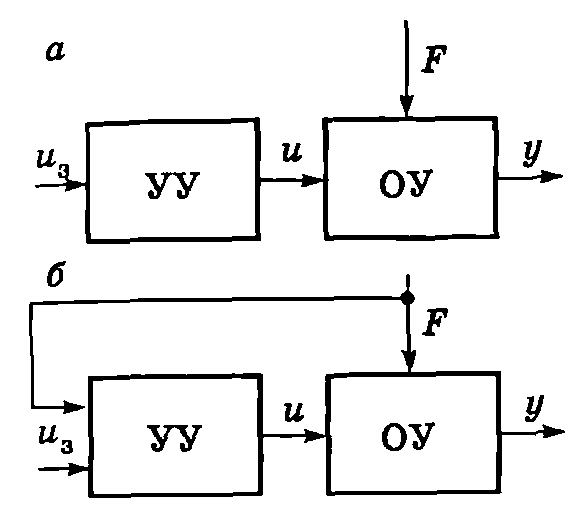
Рис.1.1. Функциональные схемы разомкнутых САУ