15. Одномерная схема беспоисковой адаптивной системы.
Адаптивная система оптимального управления решает задачу поиска сочетания элементов режима обработки, при которой достигается экстремальное значение одного из показателей (например, производительности) при одновременном обеспечении заданных значений других показателей (точности, стойкости инструмента и т.д.)
Адаптивные системы оптимального управления могут строиться по поисковому или беспоисковому принципу.
Для поисковых систем требуется малый объем предварительной информации, но приходится измерять много параметров; последнее является существенным недостатком; другой недостаток - значительное время для осуществления алгоритма поиска.
Достоинство такой системы - точное поддержание экстремума. Беспоисковые системы основаны на использовании предварительно разработанной модели процесса обработки, на основании которых по информации о внешних возмущениях формируется управляющее воздействие. Беспоисковые системы нашли более широкое применение, хотя эффективность их значительно ниже, чем поисковых.
По своему назначению адаптивные системы подразделяются на технологические, точностные и комплексные.
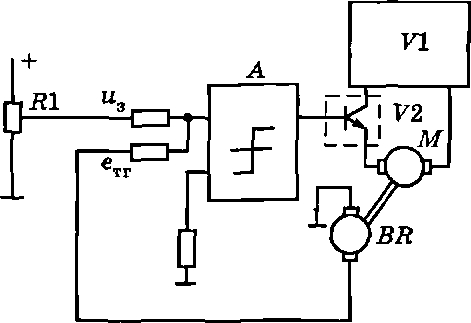
16. Система релейного действия в управлении эл. Двигателем.
Релейные САУ характеризуются тем, что в них управляющее воздействие формируется с помощью релейных элементов. При подаче на вход релейного элемента непрерывного воздействия и достижении им определенного значения, называемого пороговым, его выходная величина, представляющая управляющее воздействие, скачкообразно возрастает. В качестве примера на рис. 1.11 приведена САУ релейного действия, которая служит для поддержания постоянства скорости двигателя постоянного тока М. В качестве релейного элемента применен транзисторный ключ V2, который подключает двигатель М к источнику постоянного напряжения V1, если напряжение рассогласования и3 — етт больше нуля, и отключает двигатель М от источника питания V1, если напряжение рассогласования отрицательное. Таким образом, скорость двигателя колеблется относительно среднего значения, близкого к заданному.
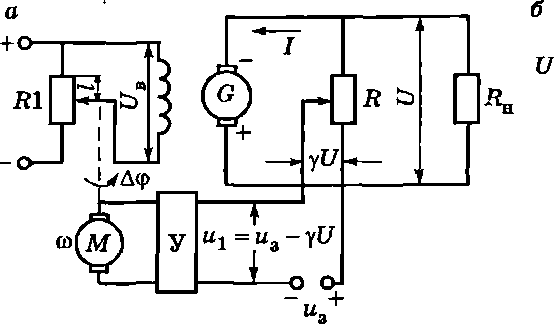
17. Астатическая система регулирования.
Астатическая САУ характеризуется тем, что при воздействии, стремящемся с течением времени к установившемуся значению, отклонение регулируемой величины стремится к нулю. В системах автоматической стабилизации, где задающее воздействие сохраняет постоянное значение, стремятся получить систему, астатическую по отношению к возмущающему воздействию, а в следящих системах — по отношению к задающему воздействию. Для того чтобы САУ являлась астатической по отношению к задающему воздействию, необходимо интегрирование ошибки регулирования. Порядок астатизма системы соответствует порядку нуля интегрирующего устройства. На практике широкое применение получили САУ с астатизмом первого порядка (позиционные) и с астатизмом второго порядка (скоростные).
Рис.1.15.
Астатическая система регулирования
напряжения генератора: а — принципиальная
схема; б — статическая характеристика
с зоной нечувствительности