

32.Ступенчатые и импульсные сигналы
Для исследования динамических свойств систем автоматического управления (САУ) пользуются типовыми сигналами, к которым относятся ступенчатый, импульсный, гармонический, линейно-возрастающий и др.
Ступенчатый сигнал (рис.) – один из наиболее простых видов сигналов, используемых при расчете переходных процессов в САУ.


Он
представляет функцию времени, которая
в момент ![]() достигает значения
достигает значения ![]() и остается далее постоянной. При
и остается далее постоянной. При ![]()
![]() .
.
Математически ступенчатая функция записывается в виде:
![]()
где
![]() – единичная ступенчатая функция:
– единичная ступенчатая функция: ![]()
При
![]() получаем единичный ступенчатый сигнал.
получаем единичный ступенчатый сигнал.
Изображение
по Лапласу ступенчатой функции имеет
вид: ![]()
Импульсный
сигнал можно рассматривать как предел
прямоугольного импульса высотой ![]() и длительностью
и длительностью ![]() при
при ![]() ,
площадь которого
,
площадь которого ![]() (рис. 2.2, а). Он представляет производную
от ступенчатого сигнала
(рис. 2.2, а). Он представляет производную
от ступенчатого сигнала ![]() или
или ![]()
где
![]() - дельта-функция, равная производной
- дельта-функция, равная производной
![]() от единичной ступенчатой функции
.
Математическая дельта-функция выражается
так:
от единичной ступенчатой функции
.
Математическая дельта-функция выражается
так:
![]() причем
причем ![]() .
.
Изображение
по Лапласу импульсной функции ![]()
![]()
Для прямоугольного импульса (рис. 2.2, б)
![]()
а изображение этой функции по Лапласу:
![]()
Для импульса треугольной формы (рис. 2.2, в) изображение по Лапласу:
![]()
33.Замкнутая система управления
Системы управления, использующие обратную связь, называются замкнутыми. В таких системах обратная связь используется для изменения управляющего сигнала с целью достижения управляемым объектом требуемого состояния.
Для сравнения, разомкнутая система управления не имеет обратной связи или не использует ее.
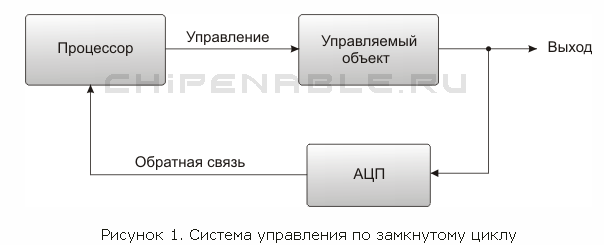
Простейшая замкнутая система управления показана на рис. 1. Этот рисунок характеризует множество существующих систем управления, включая, например, систему управления лифтом, термостат и круиз-контроль.
Замкнутая система управления обычно работает с фиксированной частотой. Частота изменений управляющего сигнала обычно меньше или равна частоте выборки состояния управляющего объекта. Во всяком случае, никак не больше.
После получения от датчика каждого нового значения данных, программное обеспечение управляющей системы реагирует на изменившееся состояние объекта, выполняя перерасчет и задавая требуемое значение управляющего сигнала. Объект откликается на эти изменения, производится следующая выборка и цикл повторяется. В конечном счете, управляемый объект должен достигнуть требуемого состояния и тогда программное обеспечение перестанет изменять управляющий сигнал.
34.Программное управление скоростью электродвигателя
Системы
программного управления служат для
изменения регулируемой координаты во
времени по определенному, заранее
установленному закону, называемому
программой. В этом случае задающее
воздействие является заданной функцией
времени: ![]() .
Примером может служить система
программного управления скоростью
двигателя (рис. 1.10). ЭДС
.
Примером может служить система
программного управления скоростью
двигателя (рис. 1.10). ЭДС ![]() тахогенератора BR,
пропорциональная скорости двигателя,
сравнивается с заданным напряжением
тахогенератора BR,
пропорциональная скорости двигателя,
сравнивается с заданным напряжением
![]() ,
формируемым программным устройством
ПУ по заданному во времени закону.
Напряжение рассогласования, определяемое
разностью
,
формируемым программным устройством
ПУ по заданному во времени закону.
Напряжение рассогласования, определяемое
разностью ![]() в данный момент времени, усиливается
усилителем А
и
поступает на вход системы управления
преобразователя П.
в данный момент времени, усиливается
усилителем А
и
поступает на вход системы управления
преобразователя П.
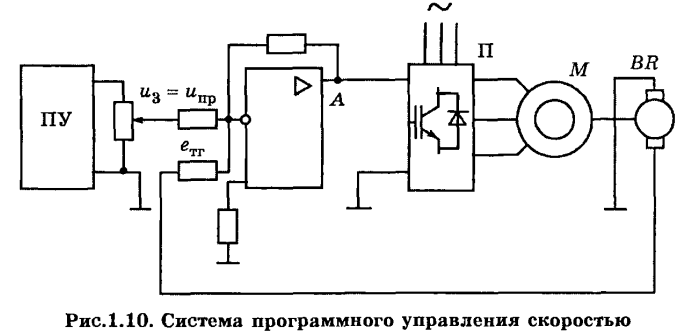
На выходе П формируется напряжение рассогласования, которое подается на двигатель М. Скорость двигателя М изменяется таким образом, чтобы уменьшить напряжение рассогласования. Двигатель отрабатывает поступающее с программного устройства задание , устанавливая скорость, соответствующую с некоторой степенью точности новому его значению.
Системы программного управления применяются также для обработки механизмом заданных программой перемещений. Перемещение может быть задано либо в аналоговой, либо в цифровой форме.
Системы, работающие в режиме пуска, торможения и реверса, предназначены для формирования заданного закона изменения координат объекта в периоды переходных процессов электромеханических САУ. Основной целью управления в этом случае является отработка системой оптимальных по быстродействию указанных режимов. Оптимальность процессов достигается за счет выбора структуры и параметров регулятора САР при ее проектировании на основании априорной информации об объекте.