

18. Частотная и амплитудная модуляции.
Амплитудная модуляция заключается в квантовании импульсов по высоте при tH = const и Т = const. При широтной модуляции импульсы квантуются по ширине при U = const и Т = const. Частотная модуляция характеризуется квантованием периода повторения при tK = const и UH = const.
Полученные в результате модуляции амплитуда, ширина и частота импульсов пропорциональны в фиксированные моменты времени значениям непрерывного сигнала, подаваемого на вход модулятора.
19.Дискретное и непрерывное управление системами
По характеру сигналов системы могут быть:
непрерывными, в которых все сигналы – функции непрерывного времени, определенные на некотором интервале;
дискретными, в которых используются дискретные сигналы (последовательности чисел), определенные только в отдельные моменты времени;
непрерывно-дискретными, в которых есть как непрерывные, так и дискретные сигналы.
Непрерывные (или аналоговые) системы обычно описываются дифференциальными уравнениями. Это все системы управления движением, в которых нет компьютеров и других элементов дискретного действия (микропроцессоров, логических интегральных схем).
Существуют также и гибридные непрерывно-дискретные системы, например, компьютерные системы управления движущимися объектами (кораблями, самолетами и др.). В них часть элементов описывается дифференциальными уравнениями, а часть – разностными. С точки зрения математики это создает большие сложности для их исследования, поэтому во многих случаях непрерывно-дискретные системы сводят к упрощенным чисто непрерывным или чисто дискретным моделям.
20. Классификация адаптивных систем.
При решении технических задач, связанных с использованием самоприспосабливающихся систем (СПС), принципиальное значение имеет классификация по характеру процесса адаптации
(рис.11.10).
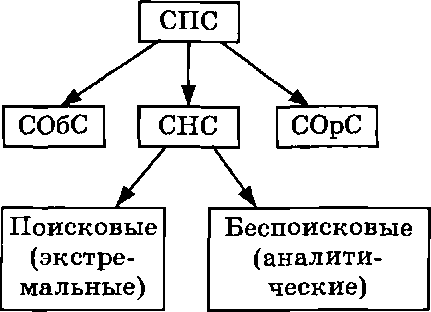
Рис.11.10. Классификация адаптивных систем
Самонастраивающиеся системы (СНС), относящиеся к этой линии классификации, представляют собой системы, в которых адаптация при изменении условий работы осуществляется путем изменения параметров и управляющих воздействий.
Самоорганизующимися (СОрС) называются системы, в которых адаптация осуществляется за счет изменения не только параметров и управляющих воздействий, но и структуры. Самоорганизующиеся системы для своего функционирования используют меньший объем априорной информации по сравнению с самонастраивающимися, поэтому они являются системами более сложного типа.
Самообучающаяся (С0бС) — это система автоматического управления, в которой оптимальный режим работы управляемого объекта определяется с помощью управляющего устройства, алгоритм которого автоматически целенаправленно совершенствуется в процессе обучения путем автоматического поиска. Поиск производится с помощью второго управляющего устройства, являющегося органической частью самообучающейся системы.
Самонастраивающиеся системы в свою очередь делятся на поисковые, или экстремальные, и беспоисковые, или аналитические.
В поисковых системах изменение параметров управляющего устройства или управляющего воздействия осуществляется в результате поиска условий экстремума показателей качества. Поиск условий экстремума в системах этого типа осуществляется с помощью пробных воздействий и оценки полученных результатов.
В беспоисковых системах определение параметров управляющего устройства или управляющих воздействий производится на основе аналитического определения условий, обеспечивающих заданное качество управления без применения специальных поисковых сигналов.