

2Системы автоматического регулирования
2.1 Основные понятия и определения
Параметрами
технологического процесса являются
физические величины определяющие его
состояние. Технологические параметры
которые необходимо поддерживать в
аппарате на заданном уровне называются
регулируемой величиной. Текущее значение
регулируемой величины (![]() )
называется измеренным в данный момент
времени ее значения. Заданное значение
регулируемой величины называется та
ее величина которой необходимо ее
поддерживать на заданном уровне в
данном объекте(
)
называется измеренным в данный момент
времени ее значения. Заданное значение
регулируемой величины называется та
ее величина которой необходимо ее
поддерживать на заданном уровне в
данном объекте(![]() ).
Согласование называется разность между
текущими и заданными значением
регулируемой величины(
).
Согласование называется разность между
текущими и заданными значением
регулируемой величины(![]() ).
).
![]()
Технологический аппарат в котором регулируется какой-либо параметр называется объектом регулирования. Совокупность объекта регулирования и технических средствкоторыми осуществляются автом.регулирование образуют автоматическую систему регулирования(АСР).
Объект регулирования есть обычные входные факторы воздействия приводящий к изменению выходных параметров или фактора, т.е. к изменению регулируемой величины.
К таким факторам относят:
1Возмущающее
воздействие – нежелательное выполнение
регулируемой величины от заданного
значения(![]() ).
).
2Регулирующее
воздействие которое целенаправленно
действует на объект регулирования и
вырабатывает автоматическим регулятором
с целью компенсации действия на объект
регулирования возмущающего воздействия(![]() ).
).
Структурная схема АСР:

ОР-объект регулирования,Д-датчик для измерения регулируемого значения,ЗУ-запоминающее устройство формирующее сигнал с заданного значением регулируемой величины.,СУ-суматор,ПР-преобразователь.,Свойства АСР:
1.Воздействие от элемента к элементу АСР передается или распространяется по замкнутому кругу
2.воздействие
распространяется в одном направлении
с выхода регулятора в виде регул.
воздействия
![]() поступает обратно на вход объекта.
Такое соединение объекта и регулятора
называется соединение по принципу
обратной связи. При этом регулируемый
сигнал
поступает обратно на вход объекта.
Такое соединение объекта и регулятора
называется соединение по принципу
обратной связи. При этом регулируемый
сигнал
![]() направлен на встречу (противоположна
сигналам возмущения
направлен на встречу (противоположна
сигналам возмущения
![]() )
с целью компенсации действия на объект
регулирования, поэтому такой обратной
связью называется отрицательной.
)
с целью компенсации действия на объект
регулирования, поэтому такой обратной
связью называется отрицательной.
2.2 Классификация систем автоматического регулирования
1.По виду
воздействующего воздействия
![]() :
:
-
Стабилизирующая в которой
 =const
=const -
Программные АСР, где
 изменяется по заданной временной
программе
изменяется по заданной временной
программе
 =
=
-
Следящие АСР, где величина
 изменяется в соответствии с изменением
какой либо др. величиной
изменяется в соответствии с изменением
какой либо др. величиной
-
Оптимизирующая АСР, где величина
 вырабатывается на оптимальном уровне
и поддерживается на этом уровне с одним
регулятором.
вырабатывается на оптимальном уровне
и поддерживается на этом уровне с одним
регулятором.
2.По принципу действия:
-
Аср по отклонению
-
АСР по возмущению.

АСР по отклонению:
Данная схема АСР
относится к АСР по отклонению, т.к.
регулирующее воздействие вырабатывает
регулировку тогда когда возникает
отклонение
![]() регулируемого параметра от заданного
значения. Недостаток этой АСР:При
действии на объект регулир. возмущение
воздействий
регулируемого параметра от заданного
значения. Недостаток этой АСР:При
действии на объект регулир. возмущение
воздействий
![]() .
.![]() появляется не сразу, а с некоторым
запаздыванием зависящий от инерционных
свойств объекта,т.е процесс регулирования
можно выразить след. графиком:
появляется не сразу, а с некоторым
запаздыванием зависящий от инерционных
свойств объекта,т.е процесс регулирования
можно выразить след. графиком:
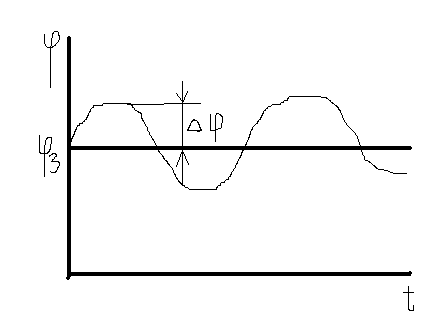
Регулируемая
величина имеет колебательную
характеристику относительно заданной(![]() ).
).
Достоинство АСР:
Идет компенсация
всех возможных возмущений воздействий
действующих на объект так как их
суммарное воздействие проявляется
изменения
![]() .
.
АСР по возмущению.В
этих АСР компенсируется только одно
возмущ. воздействие которое появляется
на выходе объекта регулирования и этот
процесс препятствует появлению
![]() .
.
Достоинство:Сравнительная быстрота воздействия на объект регулирования что вызывает улучшение качества процесса регулирования.
Недостатки:Если
на объект действует много возмущений
то
![]() будет иметь значительное отклонение
, поэтому в наиболее ответственных
случаях применяют комбинированные АСР
которые реализуются по возмущению и
отклонению.
будет иметь значительное отклонение
, поэтому в наиболее ответственных
случаях применяют комбинированные АСР
которые реализуются по возмущению и
отклонению.