

1 Разработка функциональной и структурных схем сар
1.1 Разработка функциональной схемы сар
Функциональная
схема разрабатывается по исходным
данным, а именно, по дифференциальным
уравнениям элементов САР. Взаимное
расположение элементов в схеме зависит
от входных и выходных сигналов для
каждого элемента. В данной работе схема
начинается из сигнала
![]() ,
т.е. входного сигнала СЭ, и заканчивается
сигналом
,
т.е. входного сигнала СЭ, и заканчивается
сигналом![]() ,
который является выходным сигналом для
объекта регулирования. Измерительный
элемент находится в обратной связи,
т.к. для него входным сигналом является
выходной сигнал системы, а выходным –
сигнал, приходящий на первый элемент
системы – СЭ.
,
который является выходным сигналом для
объекта регулирования. Измерительный
элемент находится в обратной связи,
т.к. для него входным сигналом является
выходной сигнал системы, а выходным –
сигнал, приходящий на первый элемент
системы – СЭ.
Все элементы функциональной схемы изображены по стандартам ЕСКД (Приложение Е). Схема изображена на рисунке 1.1.

Рисунок 1.1 - Функциональная схема дискретной САР
1.2 Разработка структурной схемы сар
На основе разработанной функциональной схеме строим структурную схему. Последовательность элементов сохраняется, только их изображение условное, в виде прямоугольников, с обозначением названия элементов в середине. Схема изображена на рисунке 1.2.
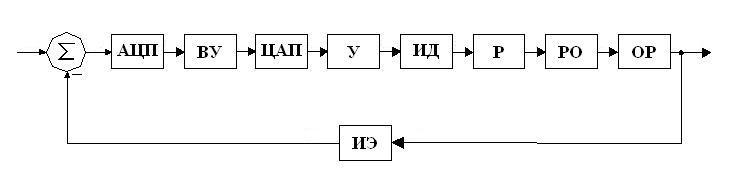
Рисунок 1.2 - Структурна схема дискретной САР
2 Описание принципа действия сар
Объектом регулирования разрабатываемой дискретной системы автоматического управления является трубопровод. Регулируемым параметром в данном случае может быть физическая величина протекающей по трубопроводу среды.
Данная дискретная САР является стабилизирующей системой. Принцип управления – замкнутое управление (управление по отклонению). Алгоритм управления основан на базе пропорционального закона регулирования.
Задающим воздействием является входной сигнал Xвх(t) . Возмущающим воздействием может бить любое не связанное с системой регулирования воздействие, например изменение температуры окружающей среды, протечки в трубопроводе, изменение состава или изменение скорости протекания среды в трубопроводе.
Разрабатываемая дискретная система автоматического регулирования предназначена для непрерывного контроля и поддержания постоянным значение регулируемого параметра, равного заданному значению. Данная система состоит из следующих элементов:
Сравнивающее устройство предназначено для формирования сигнала рассогласования между фактическим и заданным значением регулируемого параметра;
Аналого-цифровой
преобразователь (АЦП) осуществляет
преобразование входного непрерывного
сигнала
![]() в
дискретный (цифровой)
в
дискретный (цифровой)![]() .
При
этом происходит
дискретизация по времени, т.е. осуществляется
выборка непрерывного сигнала
в дискретные моменты времени
.
При
этом происходит
дискретизация по времени, т.е. осуществляется
выборка непрерывного сигнала
в дискретные моменты времени
![]() .
При
исследовании ДСАР преобразователь
АЦП представляется в виде идеального
ключа способного мгновенно размыкаться
или смыкаться генерируя на выходе
последовательность импульсов типа
.
При
исследовании ДСАР преобразователь
АЦП представляется в виде идеального
ключа способного мгновенно размыкаться
или смыкаться генерируя на выходе
последовательность импульсов типа
![]() -
функции, амплитуда импульсов при этом
будет пропорциональна величине
непрерывного
сигнала в момент мгновенного замыкания.
-
функции, амплитуда импульсов при этом
будет пропорциональна величине
непрерывного
сигнала в момент мгновенного замыкания.
Цифро-аналоговый преобразователь (ЦАП) при исследовании дискретной системы представляется в виде формирующего элемента, который преобразует мгновенные импульсы на входе в реальные модулируемые импульсы. На выходе формирующего элемента имеем последовательность моделируемых импульсов, форма и параметры которых зависят от изменения входного сигнала. Формирующий элемент относится к непрерывной части системы, вместе с которой он образует приведенную непрерывную часть.
Цифровое вычислительное устройство (ЦВУ) - это микропроцессор, который реализует П – закон регулирования.
Исполнительный двигатель (ИД) — приводит в движение регулирующий орган.
Редуктор (Р) преобразует и передает кинематическое воздействие от ИД к регулирующему органу;
Усилитель (У) - это устройство, предназначенное для усиления входного сигнала, поступающего с ЦАП. Далее усиленный сигнал поступает на исполнительный двигатель для последующего преобразования в соответствии с законом регулирования;
Измерительный элемент (ИЭ) предназначен для измерения фактического значения управляемой величины.
Принцип действия заданной САР заключается в следующем: при изменении значения регулируемого параметра на выходе измерительного элемента, пропорционально величине контролируемого параметра изменяется аналоговый сигнал, поступает на вход сравнивающего элемента. СЭ выполняет сравнение заданного значения регулируемого параметра, представленного в аналоговой форме, с сигналом, поступающим из ИЭ. В случае рассогласования этих сигналов СЭ формирует на выходе сигнал отклонения, который поступает на вход АЦП, где преобразуется в дискретную форму. Далее сигнал поступает на вход ВУ, где преобразуется в соответствии с П - законом регулирования, запрограммированного в вычислительном устройстве в дискретный сигнал определённой частоты. Далее производиться широтно-импульсная модуляция этого сигнала с помощью цифро-аналогового преобразователя, в результате чего образуется сигнал в виде последовательности прямоугольных импульсов с постоянной амплитудой, периодом и переменной шириной и скважностью импульса, пропорциональной значению входного сигнала. Эти импульсы подаются на вход исполнительного двигателя, ротор которого с приходом каждого последующего импульса поворачивается на определённый угол. Величина угла поворота ротора зависит от длительности импульса. Скорость вращения ротора ИД уменьшается за счёт редуктора. Вращение ведомого вала редуктора приводит к закрытию или открытию клапана, выступающего в роли регулирующего органа, тем самым изменяя значение регулируемого параметра до тех пор, пока он не станет равным заданному значению Хвх(t). Аналоговый сигнал из ИЭ поступает на СЭ, где преобразовывается в аналоговый сигнал рассогласования и далее на АЦП. Принцип управления – по отклонению.