

курсовая работа / raschet_sistemy_regulirovaniya_skorosti
.doc
Пункт 1: «Вывод уравнений. Определение численных значений постоянных времени и коэффициентов усиления
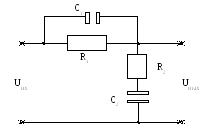
Принципиальная электрическая схема системы регулирования скорости:
(Ку) С
Нагрузка















































RЯГ
RЯД
МГ









Ll
(КД,
ТЭМ)
US
RL

(Кl,
Тl)
С








В
RЯД
RЯГ

MC UГ






![]()
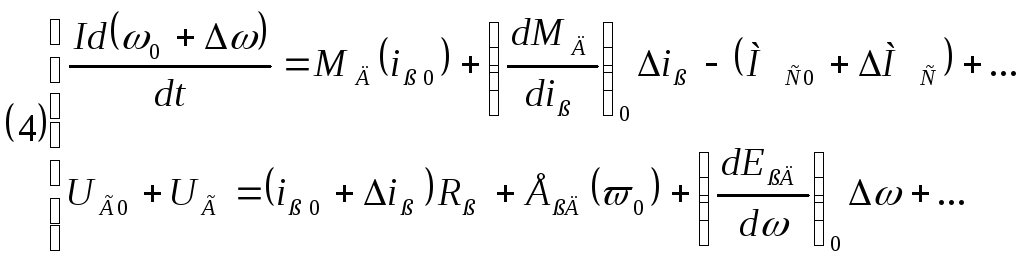
Вычитаем из системы (4) систему (2) получаем следующее:

Выражаем из первого уравнения:

Из второго уравнения получаем:
![]() и с учётом
и с учётом
![]() ;
;
![]()
![]() ,
где
,
где
![]()
В результате преобразования Лапласа получаем:
![]()


Передаточная функция генератора без нагрузки

![]()
![]()
![]()
Подставив
выражение для
![]() в выражение для обмотки возбуждения
получим:
в выражение для обмотки возбуждения
получим:
![]()

![]()
![]()
![]()
![]()
Передаточные функции для инерционно-форсирующего звена
Исходные данные:
С
R




 0
= 4000 Oм,
R = 400000
Oм C=1 мкФ
0
= 4000 Oм,
R = 400000
Oм C=1 мкФ
R0
R
UВХ
UВЫХ













Пункт: 2
Построить структурную схему системы регулирования скорости с указанием передаточных функций звеньев

![]()
![]()
![]()


![]()
![]()
![]()
![]()
![]()
![]()
![]()

![]()
![]()














![]()
![]()


Пункт 3
Определить передаточную функцию замкнутой системы относительно регулируемой координаты по команде т.е. по напряжению U0

Пункт 4
Определите передаточную функцию для ошибки (отклонения) регулируемой величины от заданного задания (по возмущению);

Пункт 5
Определить коэффициент усиления системы и коэффициент усиления электронного усилителя по заданным условиям точности в установившемся режиме по заданной статической ошибке.
![]()
![]()
![]()
![]()
![]()
Пункт 6
Определить для систем регулирования скорости, какое напряжение нужно установить на потенциометре, чтобы заданная скорость вращения была n = 600 об/мин. Сравнить величины изменения скорости вращения ∆n относительно заданного значения nо для регулируемого двигателя при приложении к его валу момента сопротивления Мс = 2000 нм
Таким образом начальные данные будут состоять из:
МС = 2000 Нм и n=600
об/мин. Если ранее
![]() было рассчитано при n=750
об/мин, то теперь поменяв значение на n
= 600 об/мин, мы рассчитаем значение
коэффициента
было рассчитано при n=750
об/мин, то теперь поменяв значение на n
= 600 об/мин, мы рассчитаем значение
коэффициента
![]() с учётом внесённых изменений:
с учётом внесённых изменений:
![]()
где
![]()
![]()
![]()
![]()
![]()
![]()
![]()
«ω – Мс»
В регулируемой системе:

В нерегулируемой системе:
![]()
Пункт: 7
Провести Д – разбиение по общему коэффициенту усиления. Сделать разметку Д – областей, построив с этой целью годограф Михайлова для одной из точек Д – областей. Определить критический коэффициент усиления и сравнить его с коэффициентом усиления, найденным в пункте 6.
Зададим Т < 0,05

Зададим ТР = 2с
ТГ = 1с
ТЭМУ = 0,5с
![]()
![]() где Р = jω
где Р = jω
![]()
![]()
![]()
![]()
![]()
![]()
![]()


![]()
|
ω |
U |
V
|
|
0 |
-1 |
0
|
|
,53 |
0 |
-
|
|
1,8 |
10,34 |
0
|
|
∞ |
∞ |
∞ |








![]()

- 1,
10,34 – критические точки
1,
10,34 – критические точки
Краз = 0
![]()
![]()
![]()
Пункт: 8
Построить логарифмические характеристики разомкнутой системы и сделать вывод об устойчивости замкнутой системы по критерию Найквиста – Михайлова.
Пункт: 9
Провести синтез пассивного корректирующего устройства методом логарифмических амплитудных характеристик (ЛАХ). Определить численные значения параметров коррекции. Выбрать место включения корректирующего устройства.

Из имеющихся интегро-дифференцирующих звеньев выберем подходящий нам.
Проведем расчеты:

Пункт: 13
Определить основные показатели качества процесса регулирования: динамическую ошибку χд, быстродействие Трег.
Основные показатели качества процесса регулирования:
Динамическую ошибка χд = 30%
Быстродействие Трег = 1сек
Пункт: 14
Оценить качественно влияние не учтенных в расчете факторов:
-
несимметричность характеристики электронного усилителя,
-
изменение нагрузки МС,
-
изменение коэффициентов усиления усилителей,
-
нагрев сопротивлений.
Сделать общий вывод о работоспособности системы.
Несимметричность характеристик электронного устройства может играть, как положительную, так и отрицательную роль. Если коэффициент усилителя дальше в области положительных сигналов, то в момент прихода положительных сигналов ошибка системы уменьшается. Если не дальше в области отрицательных входных сигналов, то ошибка увеличивается.
Изменение МС влечет за собой изменение установившегося значения , с увеличением нагрузки МС, возрастает и, наоборот, с уменьшением МС, увеличивается.
Нагрев сопротивлений приводит к изменению коэффициента усиления всей системы.
Изменение постоянных времени приводит к изменению вида LНС(). Например, при сдвиге ср влево, время переходного процесса увеличивается и наоборот.
Пункт: 15
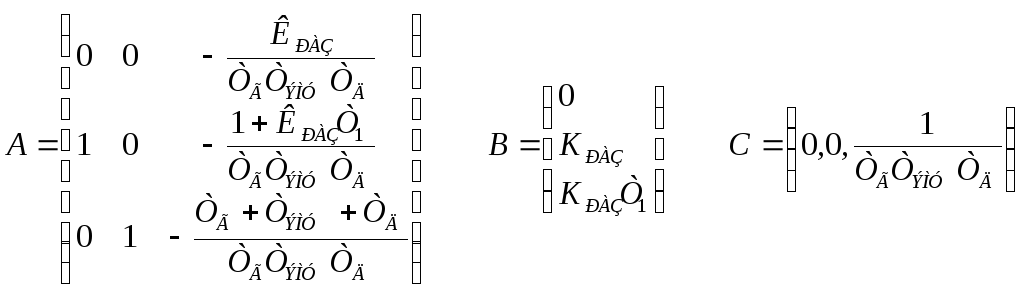
Осуществить переход от структурной схемы системы к нормальной форме и исследовать управляемость и наблюдаемость скорректированной системы. Сделать выводы о применимости частотного метода для анализа и синтеза системы.
Система z*=A*z1+B*и называется полноуправляемой, если она, ни каким не особым преобразованием z = Тz* она не может быть приведена к виду:

Наблюдаемость V=(СТ, АТСТ, …, (АТ)N-1СТ). Исходная система z*=A*z1+B* будет полностью наблюдаема если ранг матрицы будет равен n.

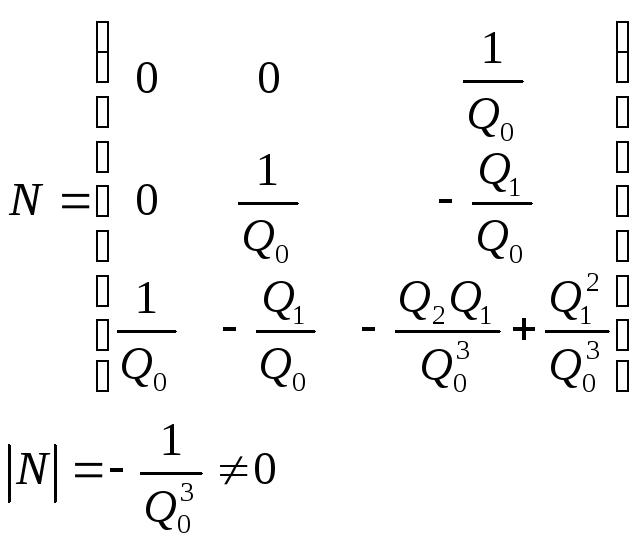
Управляемость y=(BТ, АB, …, АN-1B). Исходная система z*=A*z1+B* является полноуправляемой если ранг матрицы управляемости равен n.


Управляемость

Наблюдаемость:

Список литературы.
-
Васильев Д.В., Чуич В.Г. Системы автоматического регулирования. М., Высшая школа, 1967г.
-
Ахметгалиев Н.Н. и др. Экспериментальные методы исследования систем автоматического регулирования. Казань: КАИ, 1978г.
-
Воронов А.А. Основы теорем автоматического регулирования. 41-М.-А., Энергия, 1985г.
-
Бесекерский В.А. и др. Сборник задач по теории автоматического регулирования.
М, Наука, 1965г.