

курсовая работа / sintez_i_analiz_sistem_avtomaticheskogo_upravleniya
.doc
Министерство общего и профессионального образования Российской Федерации.
ПЕРМСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
Вечерний факультет в г. Чайковский.
КУРСОВАЯ РАБОТА
по ТЕОРИИ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
тема: Синтез и анализ систем автоматического управления.
Выполнил : студент гр. БА-99-1У
Проверил:
г. Чайковский 2002 г.
Содержание.
1. Проверить на устойчивость ОУ методом Гурвица 2
-
Схема переменных состояний 3
-
Моделирование ОУ и определение основных показателей качества: время переходного процесса и перерегулирование. 3
4. Проверка ОУ на управляемость и наблюдаемость. 3
5. Синтез цифрового САУ методом переменного коэффициента усиления. 4
-
Моделирование САУ (Matlab), в качестве переходного процесса рассмотреть
переходный процесс переменной x1 и управляющего цифрового сигнала m 5
7. Определение основных показателей качества ЦСАУ (Время переходного
процесса и перерегулирования) 4
8. Синтез САУ методом структурно- параметрической оптимизации. 4
9. Моделирование САУ (Matlab). 6
10.Определение показателей качества управления САУ (аналогового САУ). 9
11. Вывод. 9
Задание на курсовую работу.
![]() ;
;
![]() - Заданные значения
- Заданные значения
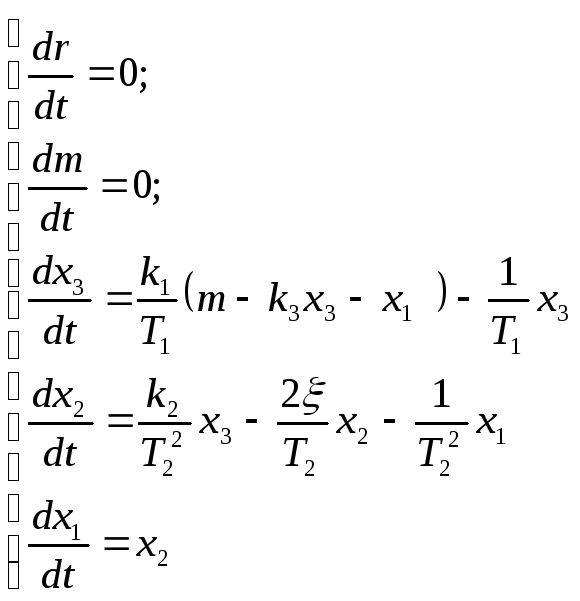
![]()
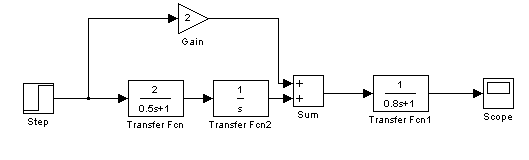
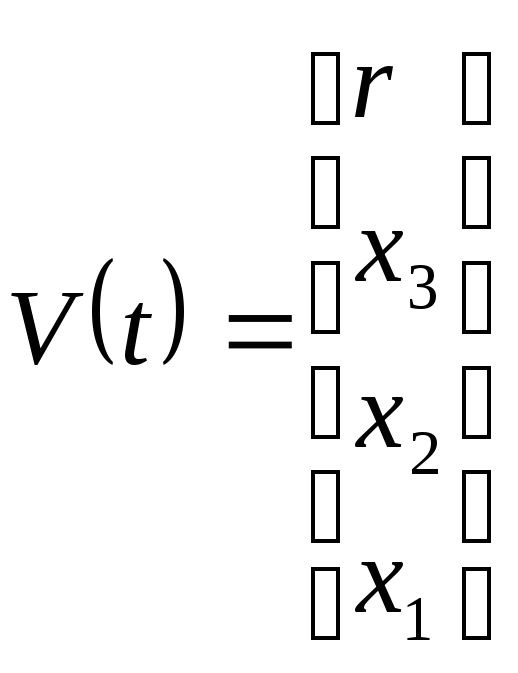
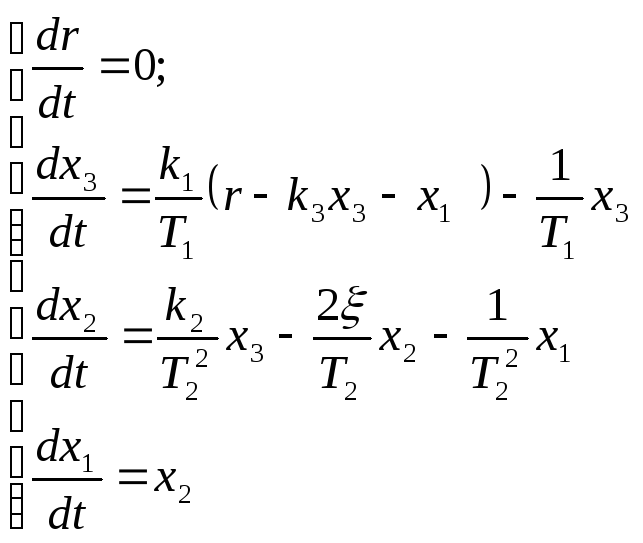
Схема переменных состояний объекта управления

2.2. Построение математической модели объекта управления по схеме переменных состояний.
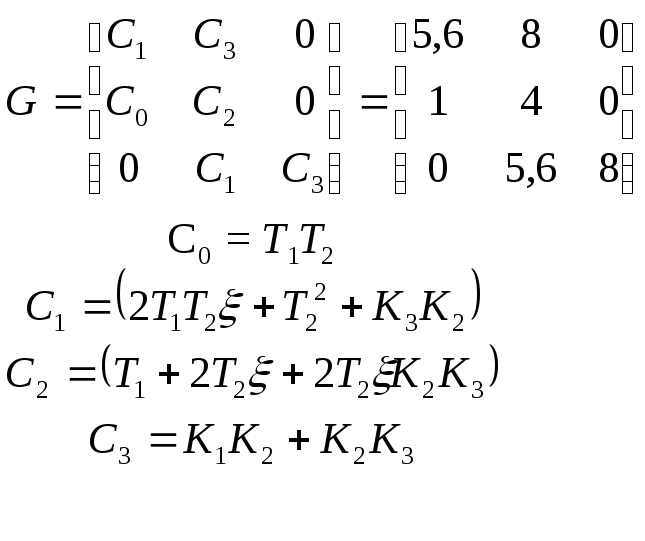
2.3. Определение передаточной функции объекта управления.

2.4. Проверка объекта управления на устойчивость методом Гурвица.
![]()
-характеристическое уравнение. Для определения устойчивости методом Гурвица составим соответствующую матрицу из коэффициентов уравнения системы:
![]()

Объект управления устойчив.
2.5. Моделирование объекта управления.
Моделирование объекта производилось на ПЭВМ с использованием программы "Matlab" и её управляющего модуля Simulink.
Моделирование производилось в двух вариантах т.е. сначала смоделировали заданную схему, а затем преобразованную. В результате моделирования получили два идентичных графика переходного процесса, что говорит о правильности проведенных преобразований.
Схема исходного объекта управления и СПС его приведены выше.
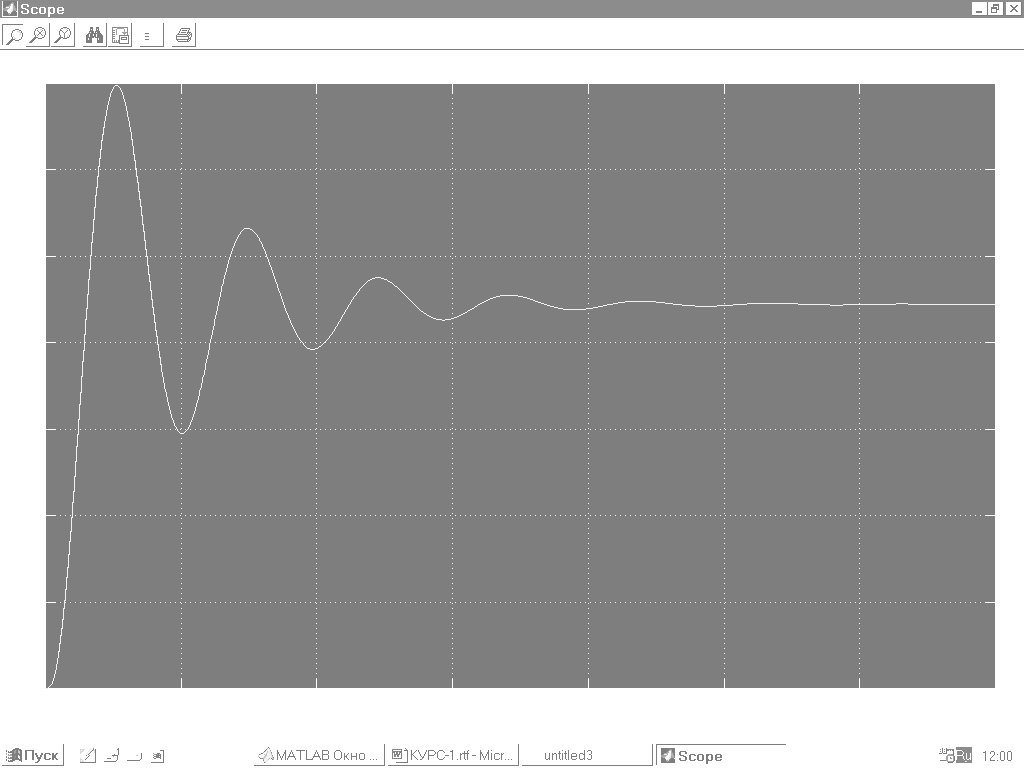
Рис. 2.5.1. Переходный процесс в исходной схеме.
Переходный процесс в преобразованной схеме аналогичный и здесь на приводится ввиду экономии места.
3. Синтез системы методом переменных коэффициентов усиления.
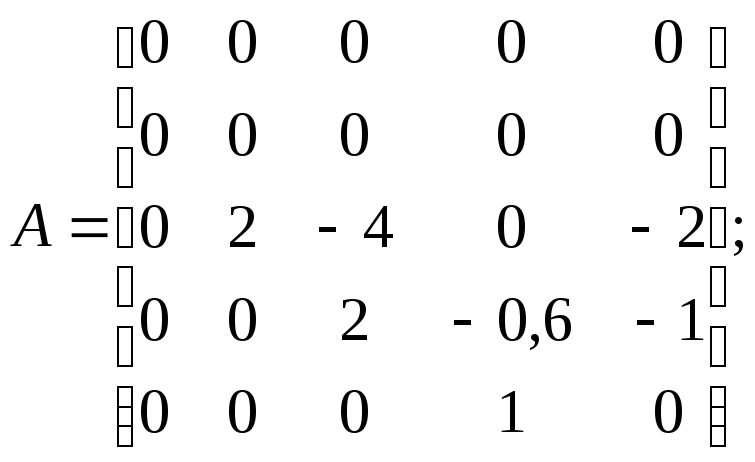
По полученной системе уравнений строим
матрицу коэффициентов А, затем, используя
метод разложения в ряд функции
![]() ,
получим матрицу перехода Ф при времени
,
получим матрицу перехода Ф при времени
![]() .
.
Ф(Т0)=
Составляем систему уравнений 3-го порядка
относительно
![]() для
каждого момента Т вида :
для
каждого момента Т вида :
![]() .
Т.к.
.
Т.к.
![]() ,
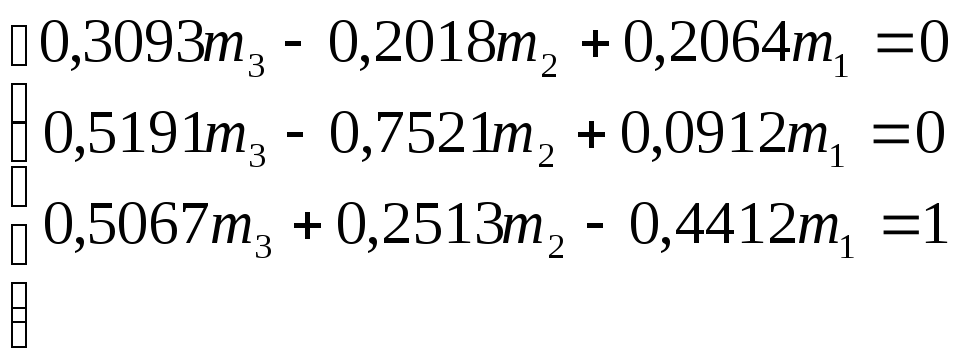
то уравнение можно переписать в виде :
,
то уравнение можно переписать в виде :
![]() .
.
![]()
Ошибки системы:
Проведя все необходимые вычисления получим передаточную функцию регулятора:

Рис. 3.1 Схема объекта управления вместе с регулятором.
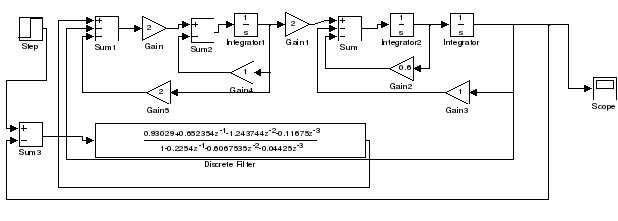
3.1. Моделирование объекта управления вместе с регулятором.
Моделирование САУ производилось на ЭВМ с использованием программы "Matlab" и её управляющего модуля Simulink.

Рис. 3.1.1. Графики переходных процессов при использовании цифрового регулятора.
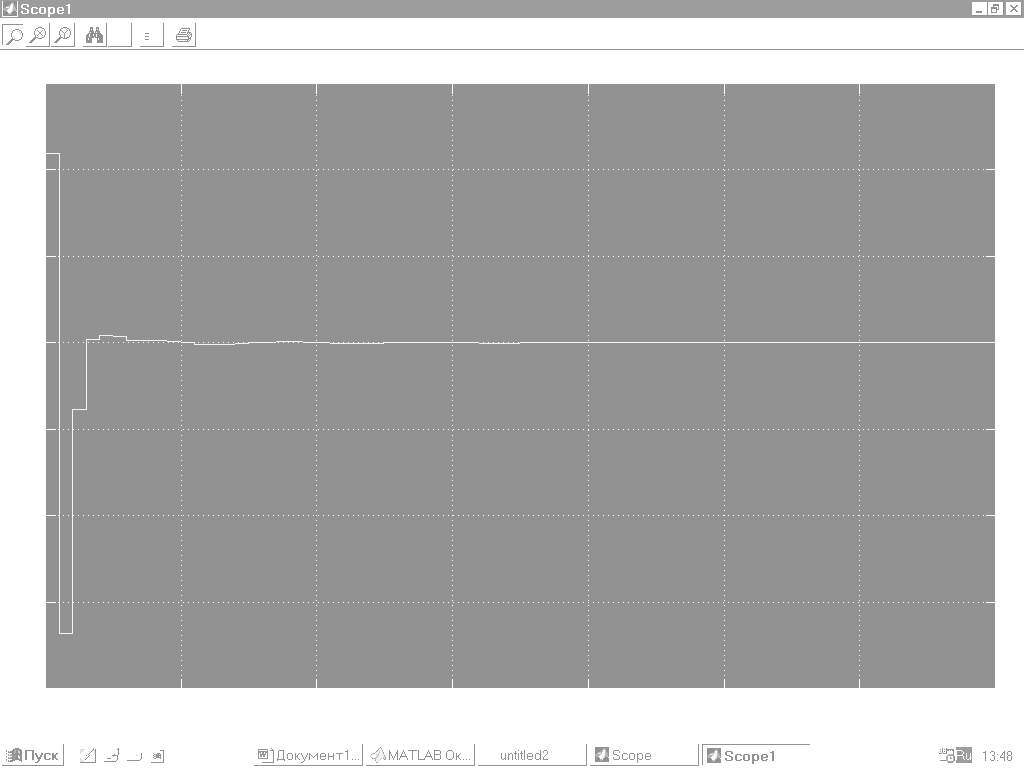
Рис. 3.1.2. График переходных процессов на выходе цифрового регулятора.
4. Расчет модального регулятора для объекта управления.
Перед проведением расчета модального регулятора необходимо провести проверку объекта управления на наблюдаемость и управляемость, для выяснения целесообразности проводимых расчетов.
4.1. Проверка объекта управления на управляемость.
Для управляемости объекта управления необходимо и достаточно чтобы матрица Н вида [B AB A2B … An-1 B] имела rang = n , где:
Матрица коэффициентов при Х= ;
;
матрица коэффициентов входных сигналов
r=![]() ;
;
При n=3 det(Н)=32,
где Н=![]() ;
;
Из расчетов наглядно видно, что определитель матрицы Н > 0 и имеет 3ий порядок, следовательно, матрица Н имеет rang = 3 т.е. объект управления управляем.
4.2. Проверка объекта управления на наблюдаемость.
Для наблюдаемости объекта управления
необходимо и достаточно чтобы матрица
M вида [С AТСТ
(AТ)2СТ
… (AТ)n-1
СТ] имела rang = n
, где матрица коэффициентов выходных
сигналов С=![]() ;
;
при n=3 det(М)=87,
где М=![]() ;
;
Из расчетов видно, что определитель матрицы M > 0 и имеет 3-ий порядок, следовательно матрица M имеет rang = 3 т.е. объект управления наблюдаем.
4.3.Расчет модального регулятора.
Убедившись в управляемости и наблюдаемости объекта управления, можно приступать к расчету модального регулятора. Задача расчета – получить матрицу коэффициентов
обратных связей по каждой переменной состояний.

К - матрица коэффициентов обратных
связей, К=![]() .
.
det![]() ;
;
![]() - характеристическое уравнение,
определяемое способом биноминального
распределения:
- характеристическое уравнение,
определяемое способом биноминального
распределения:![]() ,
,
для n=3
![]() .
.
приравнивая коэффициенты при равных
степенях р находим
 ;
;
приравнивая коэффициенты при равных степенях р находим :
![]()
![]() .
.
4.4. Моделирование объекта управления вместе с регулятором.
Рис.4.4.1. Схема переменных состояний системы с модальным регулятором.
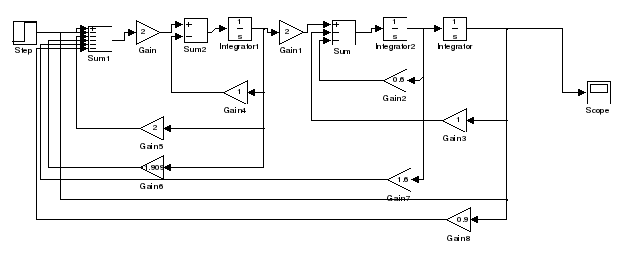
Рис.4.4.2. График переходного процесса системы с модальным регулятором.

5. Сравнительный анализ качества управления двух методов.
Изначально объект управления был устойчив.tпп=25сек. σ=57,55%
Из-за наличия в системе колебательного звена система не сразу приходит в установившееся состояние. Поэтому такое большое tпп.
Используя цифровой регулятор, построенный методом переменных коэффициентов время переходного процесса составляет 15 сек. при перерегулировании σ=12,54%
При использовании модального регулятора время переходного процесса увеличилось до 20 сек при перерегулировани σ=17%.
При применении регуляторов переходные процессы в заданной устойчивой системе улучшаются: уменьшается перерегулирование, уменьшается время переходного процесса. Незначительное повышение уровня выходного сигнала в системе с цифровым регулятором обусловлено погрешностями из-за округления заначений при расчётах.