

РЕФЕРАТ
Курсовая работа содержит 46 страниц, 22 рисунка, одну таблицу, список литературы из 5 источников.
Объектом исследования является система управления автоматизированным электроприводом.
Цель работы – разработка САУ электропривода. В процессе работы проведены анализ качества регулирования САУ, оптимизация настроек ПИ-регулятора и расчет переходных процессов.
ПЕРЕХОДНАЯ ФУНКЦИЯ, КРИТЕРИЙ УСТОЙЧИВОСТИ НА ЙКВИСТА, ПЕРЕХОДНАЯ ХАРАКТЕРИСТИКА, ЛФЧХ, ЛАЧХ, КФЧХ, ПИ-РЕГУЛЯТОР
СОДЕРЖАНИЕ
|
ВВЕДЕНИЕ |
|
|
1. АНАЛИТИЧЕСКИЙ ОБЗОР |
|
|
2. ОСНОВНАЯ ЧАСТЬ |
|
|
2.2. Анализ качества в исходной системе с пропорциональным регулятором скорости |
|
|
2.2.1. Структурная схема системы |
|
|
2.2.2. Расчет коэффициентов передачи и постоянных времени |
|
|
2.2.2.1. Параметры передаточной функции ГПТ |
|
|
2.2.2.2. Параметры передаточной функции ДПТ |
|
|
2.2.3. Передаточные функции и дифференциальные уравнения системы |
|
|
2.2.3.1. Передаточная функция и дифференциальное уравнение разомкнутой системы |
|
|
2.2.3.2. Передаточная функция и дифференциальное уравнение замкнутой системы |
|
|
2.2.3.3. Передаточная функция и дифференциальное уравнение замкнутой системы по управляющему воздействию |
|
|
2.2.3.4. Передаточная функция и дифференциальное уравнение замкнутой системы по возмущающему воздействию |
|
|
2.2.3.5. Передаточная функция и дифференциальное уравнение замкнутой системы по ошибке |
|
|
2.2.4. Анализ устойчивости, определение критического коэффициента усиления, используя критерий Гурвица |
|
|
2.2.5. Построение ЛАЧХ и ЛФЧХ разомкнутой системы. Оценка качества регулирования разомкнутой и замкнутой системы |
|
|
2.2.6. Построение электромеханической характеристики в статике для разомкнутой и замкнутой системы. Оценка качества регулирования в статике |
|
|
2.2.7. Оптимизация контура регулирования скорости двигателя по модульному оптимуму |
|
|
2.3. Оптимизация САУ по критерию параметрической стабилизации |
|
|
2.3.1. Расчет переходных характеристик оптимизированной системы электропривода по управляющему и возмущающему воздействию |
|
|
2.4. Расчет параметров регулятора скорости |
|
|
3. ЗАКЛЮЧЕНИЕ |
|
|
4. СПИСОК ИСПОЛЬЗОВАННОЙ ЛИТЕРАТУРЫ |
|
ВВЕДЕНИЕ
Современная теория автоматического регулирования является основной частью теории управления. Система автоматического регулирования состоит из регулируемого объекта и элементов управления, которые воздействуют на объект при изменении одной или нескольких регулируемых переменных. Под влиянием входных сигналов (управления или возмущения) изменяются регулируемые переменные. Цель же регулирования заключается в формировании таких законов, при которых выходные регулируемые переменные мало отличались бы от требуемых значений. Решение данной задачи во многих случаях осложняется наличием случайных возмущений (помех). При этом необходимо выбирать такой закон регулирования, при котором сигналы управления проходили бы через систему с малыми искажениями, а сигналы шума практически не пропускались.
Эффективность средств, производства, которыми располагает человечество, в значительной степени определяется совершенством способов получения энергии, необходимой для выполнения механической работы в производственных процессах.
В автоматизированном электроприводе нашли применение и получили дальнейшее развитие основные достижения техники управления – от новейших аппаратов до полупроводниковых приборов и управляющих вычислительных машин.
Электрический привод представляет собой электромеханическое устройство, предназначенное для приведения движения рабочего органа машины и управление её технологическими процессами. Он состоит из трех частей: электрического двигателя, осуществляющего электромеханическое преобразование энергии, механической части передающей механической энергии рабочему органу, и системе управления, обеспечивающей оптимальную по тем или иным критериям управления технологическими процессами. Характеристики двигателя и возможности системы управления определяют производительность механизма, точность выполнения технологических операций, динамические нагрузки механического оборудования и ряд других факторов. С другой стороны, нагрузка механической части привода, условие движения ее связных масс, точность передач и т. п. Оказывают влияние на условие работы двигателя и системы управления, по этому электрические и механические элементы электропривода образуют единую электромеханическую систему, составные части которой находятся в тесном взаимодействии.
Свойства электромеханической системы оказывают решающее влияние на важнейшие показатели рабочей машины и в значительной мере определяют качество и экономическую эффективность технологических процессов.
Электрическая мощность, потребляемая из электрической сети в силовой части систему управления ССУ преобразуется в регулируемую мощность, подводимую к обмоткам электропривода. Двигатель представлен двумя элементами – электромеханическим преобразователя ЭМП и массой ротора РД.
Система управления состоит из силовой части ССУ и информационной части ИСУ. ИСУ получает командные сигналы от задающих устройств и информацию о состоянии электропривода и течении технологического процесса от датчиков обратных связей. На основании этих данных в соответствии с заложенным алгоритмом выбираются воздействия на силовую часть системы управления ССУ и электромеханический преобразователь ЭМП, управляющие движением системы и технологическим процессом машины.
По отношению к системе управления ССУ ЭМП и механическая часть представляют собой разомкнутую систему управления электропривода как объект автоматического регулирование переменных.
1. Аналитический обзор
Электропривод постоянного тока нуждается в постоянном регулировании скорости. Это регулирование может быть осуществлено шестью способами:
Реостатное регулирование скорости осуществляется введением добавочных сопротивлений в цепь якоря двигателя постоянного тока. Может использоваться как средство регулирования скорости, момента тока.
Параметрическое регулирование скорости изменением напряжения на якоре двигателя осуществляется быстрым снимание жесткости механических характеристик. Для двигателя с независимым возбуждением при реостатном регулирование это обусловлено тем, что приведении сопротивлении в цепь якоря скорость идеального холостого хода остается неизменной. Так как скорость определяется приложенным к якорю напряжения (Uя) и потоком двигателя (Ф), более благоприятные условия для регулирования скорость обеспечивает изменение эти параметров.
Автоматическое регулирование скорости в системе управления преобразователь – двигатель (УП-Д) может быть осуществлено электрическим суммированием на входе системы напряжения (Uз.п), пропорционального заданному значению скорости, и отрицательного напряжения (Uо.с), пропорционального фактической скорости двигателя, снимаемого с якоря тахогенератора (ТГ).
Последовательная коррекция контура, регулирование скорости в системе тиристорный преобразователь – двигатель (ТП-Д).
Регулирование скорости изменением потока двигателя. В отличие от всех вышерассмотренных способов регулирования скорости, при ослаблении поля регулировании осуществляется при изменяющемся потоке, что определяется принципиальную зависимость допустимой нагрузки от скорости. Если принять в качестве критерия допустимой нагрузки ток:

то допустимый момент при регулирование определяется соотношением:
 ,
,
которое показывает, что при ослаблении поля нагрузка на валу двигателя необходимо снижать.
Передаточная функция объекта регулирования скорости, если для удобства давнейших сопоставлений пренебречь внутренней связью по ЭДС двигателя, имеем более сложный вид, чем при тех же условиях в системе ТП-Д
Особенности системы Г-Д проявляются в усложнении схемы регулятора тока (ПИД-регулятор вместо ПИ-регулятора) и в необходимости учета возможного ограничения быстродействия системы в связи с ограниченной мощностью возбудителя. Тиристорный возбудитель генератора имеет нелинейную характеристику с ограничением выходного напряжения максимальным значением:

где kф – коэффициент форсировки,
соответствующим допустимому углу регулирование в инертном режиме.
2. Основная часть
2.2. Анализ качества в исходной системе с пропорциональным регулятором скорости.
2.2.1. Структурная схема системы.
Систему управления автоматизированным электроприводом можно условно разбить на три части:
-
объект регулирования, состоящий из электродвигателя, генератора и тиристорного возбудителя;
-
датчик скорости, включающий тахогенератор и потенциометр;
-
регулятор скорости.
Составим структурную схему в динамике, записав для каждого из элементов передаточную функцию.
Передаточная функция регулятора:

где KAR = 1.
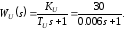
Передаточная функция тиристорного возбудителя:

Передаточная функция генератора:

Передаточная функция двигателя:
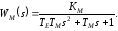
Передаточная функция датчика скорости:

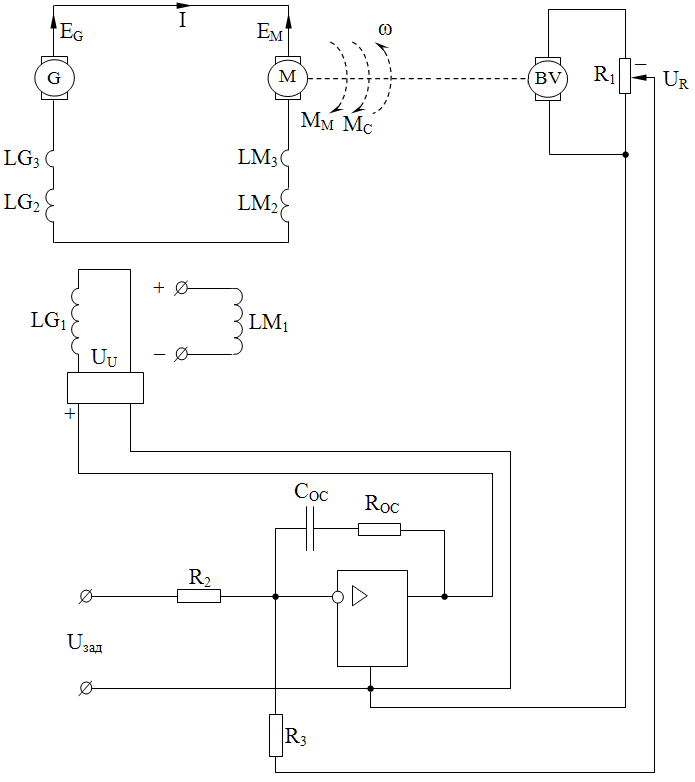
Рисунок 1 – Принципиальная схема управления автоматизированным электродвигателем

Рисунок 2 – Структурная схема электродвигателя
Структурную
схему составляем из условия, что
 .
Структурная схема в статике представлена
на рисунке 4. По ней записываем уравнение
электромеханической характеристики:
.
Структурная схема в статике представлена
на рисунке 4. По ней записываем уравнение
электромеханической характеристики:
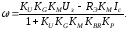
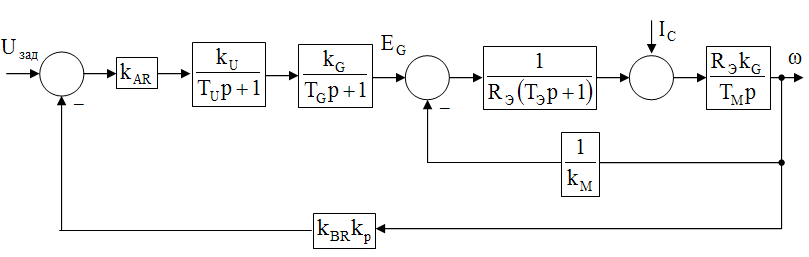
Рисунок 3 – Структурная схема системы управления электродвигателем в динамике
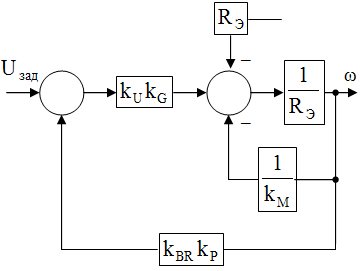
Рисунок 4 – Структурная схема системы управления электроприводом в статике
2.2.2. Расчет коэффициентов передачи и постоянных времени
Запишем передаточную функцию тиристорного возбудителя, датчика скорости и регулятора соответственно:



где KU = 30;
KBR = 2.9;
KR = 0.3448;
KAR = 1;
TU = 0.006с.
Следовательно:

2.2.2.1. Параметры передаточной функции ГПТ
Найдем постоянную времени обмотки возбуждения генератора по формуле:

где LV – индуктивность обмотки возбуждения генератора, Гн,
 – сопротивление
обмотки возбуждения генератора,
приведенное к температуре 20°С, Ом.
– сопротивление
обмотки возбуждения генератора,
приведенное к температуре 20°С, Ом.
Определим
сопротивление обмотки возбуждения
генератора при 20°С
 по формуле:
по формуле:

Определим индуктивность обмотки возбуждения генератора из выражения:

откуда


где 2p – число пар полюсов;
Wв – число витков на полюс обмотки возбуждения;
aV – число параллельных ветвей обмотки возбуждения;
δ – коэффициент рассеяния номинального магнитного потока (δ = 1.2);
ΔФ и ΔF – приращения магнитного потока и намагничивающей силы соответственно (берутся из кривой намагничивания генератора);
Fн – номинальная намагничивающая сила, А вит;
Фн – номинальный магнитный поток, Вб;
Из графика получаем значения приращений намагничивающей силы и магнитного потока генератора:
ΔФ1 = 1.4∙10–2(Вб);
ΔФ2 = 0.5∙10–2(Вб);
ΔF1 = 1000(A вит);
ΔF2 = 2000(A вит).
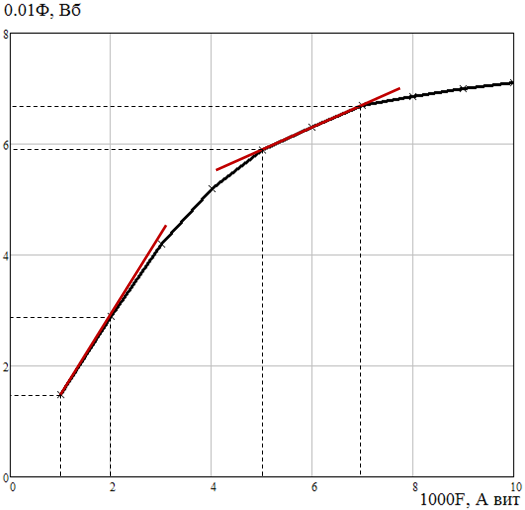
Рисунок 5 – Кривая намагничивания генератора П141-9К
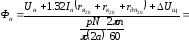
Номинальный магнитный поток генератора определяется по формуле:

откуда:



где: p – число пар полюсов;
(2а) – число параллельных ветвей обмотки якоря;
n – номинальная скорость вращения;
N – число активных стержней обмотки якоря;
ΔUщ – падение напряжения на щетках, В (ΔUщ = 2В);
 – сопротивление
обмотки якоря, компенсационной обмотки
и обмотки дополнительных полюсов
соответственно, приведенных к температуре
20°С, Ом;
– сопротивление
обмотки якоря, компенсационной обмотки
и обмотки дополнительных полюсов
соответственно, приведенных к температуре
20°С, Ом;
In – номинальный ток, А;
Uн – номинальное напряжение, В;
Eн – номинальная ЭДС, В.
Пересчитаем выражение (6):

По графику намагничивания определяем значение намагничивающей силы: Fн = 6200(А).
Определим индуктивность обмотки возбуждения по формуле (3):




Найдем TG по выражению (1):

Найдем коэффициент передачи генератора по формуле:

Получаем передаточную функцию:
2.2.2.1. Параметры передаточной функции ДПТ
Эквивалентные электромагнитная и электромеханическая постоянные времени двигателя постоянного тока можно определить по выражениям:


откуда:


где
 – индуктивности якорей генератора и
двигателя соответственно;
– индуктивности якорей генератора и
двигателя соответственно;
pг, pд – число пар полюсов генератора и двигателя соответственно;
 – номинальные
напряжения двигателя и генератора
соответственно, В;
– номинальные
напряжения двигателя и генератора
соответственно, В;
 – номинальные
токи генератора и двигателя соответственно,
А;
– номинальные
токи генератора и двигателя соответственно,
А;
 – угловые
частоты вращения генератора и двигателя
соответственно,
– угловые
частоты вращения генератора и двигателя
соответственно,
 ;
;
 – сопротивления
щеток генератора и двигателя соответственно
– сопротивления
щеток генератора и двигателя соответственно
 ,
Ом.
,
Ом.
Определим эти величины:







Отсюда получим электромагнитную постоянную:


где:


Следовательно:

Тогда известна механическая постоянная времени:

Определим коэффициент передачи двигателя по формуле:
Значит, передаточная функция двигателя равна:

2.2.3. Передаточные функции и дифференциальные уравнения системы
2.2.3.1. Передаточная функция и дифференциальное уравнение разомкнутой системы
Запишем передаточную функцию разомкнутой системы в общем виде:

или

откуда:


Следовательно, получаем:
Передаточную функцию разомкнутой системы можно записать в виде:

Характеристическое уравнение:

Подставим значения постоянных времени и коэффициентов в уравнение передаточной функции и получим:




где
коэффициенты равны:






Дифференциальное уравнение системы имеет вид:

2.2.3.2. Передаточная функция и дифференциальное уравнение замкнутой системы

Рисунок 5 – Структурная схема разомкнутой системы
Получим из структурной схемы передаточную функцию разомкнутой системы:




2.2.3.3. Передаточная функция и дифференциальное уравнение замкнутой системы по управляющему воздействию
Из структурной схемы получаем уравнение передаточной функции по управляющему воздействию:
откуда:


Получаем выражение для передаточной функции:





2.2.3.4. Передаточная функция и дифференциальное уравнение замкнутой системы по возмущающему воздействию
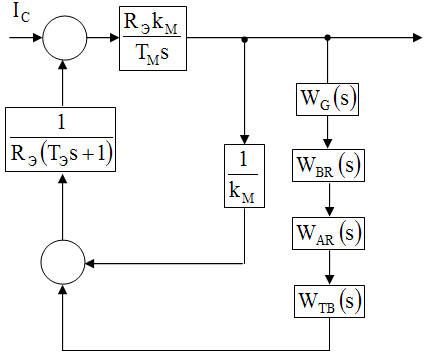
Рисунок 6 – Структурная схема замкнутой системы по возмущающему воздействию
Из рисунка выразим передаточную функцию по возмущающему воздействию:

откуда:


имеем передаточную функцию:



2.2.3.5. Передаточная функция и дифференциальное уравнение замкнутой системы по ошибке
Передаточная функция замкнутой системы по ошибке имеет вид:



Дифференциальное уравнение замкнутой системы находим из зависимостей:





где







Запишем дифференциальное уравнение:


2.2.4. Анализ устойчивости, определение критического коэффициента усиления, используя критерий Найквиста по АЧХ. Оценка качества регулирования разомкнутой и замкнутой системы
Для определения критического коэффициента, построим ЛАЧХ и ЛЧФХ разомкнутой системы. Передаточная функция разомкнутой системы выглядит следующим образом:

Делаем замену s → ωj:

Запишем выражения для АЧХ, ЛАЧХ и ЛФЧХ соответственно и построим графики в логарифмической шкале:





Рисунок 8 – ЛФЧХ разомкнутой системы
По графикам определим запас по модулю:

По графикам определим запас по фазе:

Из выражения:

найдем Ккр:

Из ЛАЧХ и ЛФЧХ определим критическую частоту и частоту среза:


Для оценки времени регулирования разомкнутой системы построим переходную характеристику:

Возьмем
обратное преобразование Лапласа от



По графику на рисунке 9 определим параметры:

время
переходного процесса:

2.2.6. Построение электромеханической характеристики в статике для разомкнутой и замкнутой системы. Оценка качества регулирования в статике
Электромеханическую
характеристику строят для замкнутой и
разомкнутой систем, для значений
напряжения задания равных
 и
и
 .
Характеристики строят по трем точкам:
.
Характеристики строят по трем точкам:
-
Ic = 0;
-
Ic = 0.5Iн;
-
Ic = Iн,
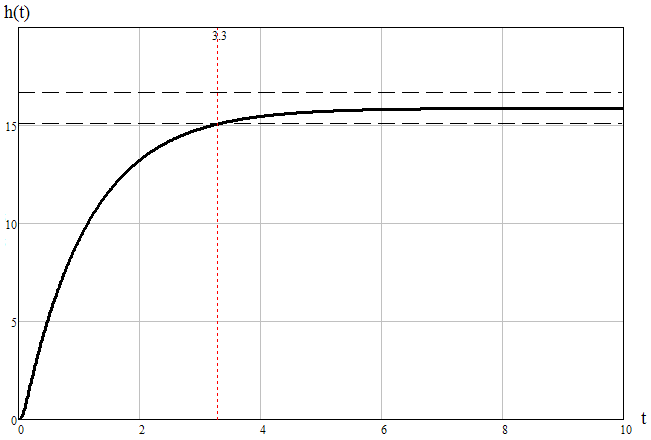
Рисунок 9 – Переходная характеристика разомкнутой системы
где Iн – номинальное значение тока двигателя.
Номинальное
значение напряжения двигателя
 определяют из условия, что при напряжении
задания равного
определяют из условия, что при напряжении
задания равного
 скорость вращения двигателя в статике
при Ic
= 0, равна
номинальному значению ωн.
скорость вращения двигателя в статике
при Ic
= 0, равна
номинальному значению ωн.




Построение электромеханической характеристики в замкнутой системе электропривода:



Построение электромеханической характеристики в разомкнутой системе электропривода:



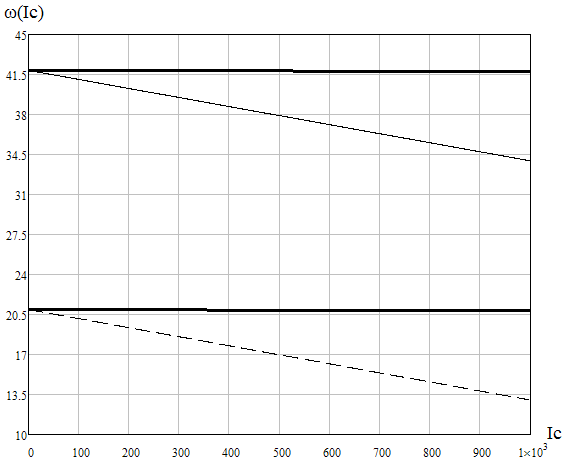
Рисунок 9 – Электромеханическая характеристика в разомкнутой системе
Определим статическую ошибку регулирования в замкнутой и разомкнутой системах по электромеханическим характеристикам:

где ω0 – значение скорости двигателя при Ic = 0, рад;
ω0 – значение скорости двигателя при Ic = 815А, рад.
Ошибка в замкнутой системе:

Ошибка в разомкнутой системе:

Статическая ошибка регулирования в разомкнутой системе больше, чем ошибка в замкнутой системе.
Определим время регулирования в разомкнутой системе по корням характеристического уравнения разомкнутой системы:

где




Найдем наименьший корень характеристического уравнения:

Время регулирования в замкнутой системе:

Построим переходную характеристику замкнутой системы и определим время переходного процесса.
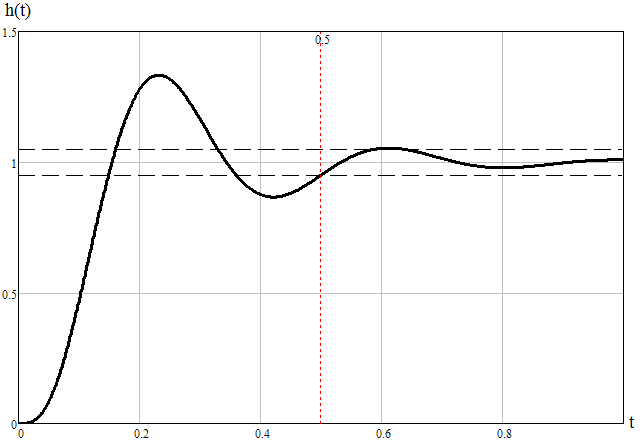
Рисунок 10 – Переходная характеристика замкнутой системы
Исходя из рисунка 10, время переходного процесса составляет:

2.2.7. Оптимизация контура регулирования скорости двигателя по модульному оптимуму
Передаточную функцию объекта можно представить в виде:

где

а

Передаточная функция системы с ПИ-регулятором:

где Ti = TG.
Передаточную функцию системы находят как произведение передаточных функций объекта и регулятора.


ЛАЧХ объекта:

ЛФЧХ объекта:
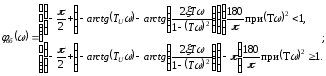

Рисунок 10 – ЛАЧХ объекта регулирования
Согласно
графику на рисунке 10, критическая частота
объекта регулирования равна:

Зададимся
значением перерегулирования, например,
 затем по графику на рисунке 11 определяем
показатель колебательности (М),
а по графику 12 – максимум вещественной
характеристики (Pmax).
затем по графику на рисунке 11 определяем
показатель колебательности (М),
а по графику 12 – максимум вещественной
характеристики (Pmax).
Эти значения равны:
-
M = 1.2;
-
Pmax = 1.06.
Далее, по графику на рисунке 13 определим необходимые запасы по модулю и фазе.


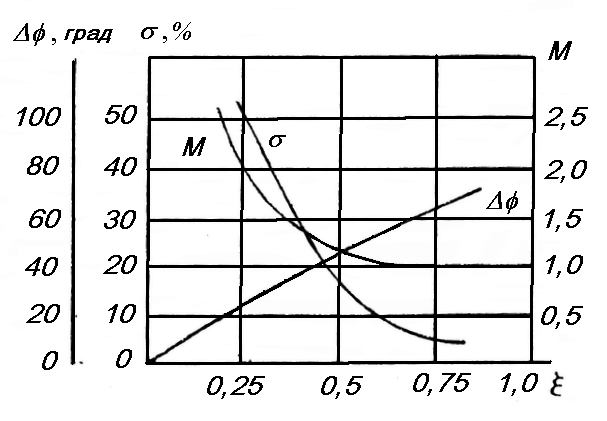
Рисунок 11 – Зависимость перерегулирования, показателя колебательности и ошибки регулирования

Рисунок 12 – Зависимость перерегулирования от значения максимума вещественной характеристики

Рисунок 13 – Зависимость запасов по модулю и фазе от значения максимума вещественной характеристики
Определим коэффициент усиления регулятора. Для этого построим ЛАЧХ желаемой системы, исходя из выражения:

где


Рисунок 14 – ЛАЧХ данной и желаемой системы
Определим коэффициент передачи регулятора из выражения:

Отобразим частотные характеристики регулятора на рисунке 15.
2.3. Оптимизация САУ по критерию параметрической стабилизации
Параметры настройки регулятора выбираются таким образом, чтобы в замкнутой системе был обеспечен заданный запас устойчивости, при этом выбранный показатель качества регулирования (критерий оптимальности) должен быть не хуже требуемого.
В
качестве ограничения на допустимый
запас выбирается показатель колебательности
(М),
а в качестве критерия оптимальности –
минимум среднеквадратической ошибки
регулирования или минимум линейного
интеграла от ошибки, что для систем с
ПИ- или ПИД-регуляторами сводится к
максимизации отношения

Расчет оптимальных настроек делятся на два этапа:
-
строится семейство КФЧХ разомкнутой системы, при коэффициенте передачи регулятора KAR = 1 и несколько значений Ti. В качестве первого приближения Ti можно взять значение из расчета по модульному оптимуму. Затем, путем подбора, строятся окружности с центром на отрицательном участке вещественной оси и касающиеся одновременно КФЧХ и луча, проведенного через начало координат под углом
 к вещественной оси. Коэффициент передачи,
обеспечивающий заданный показатель
колебательности (М):
к вещественной оси. Коэффициент передачи,
обеспечивающий заданный показатель
колебательности (М):

где R – радиус окружности;
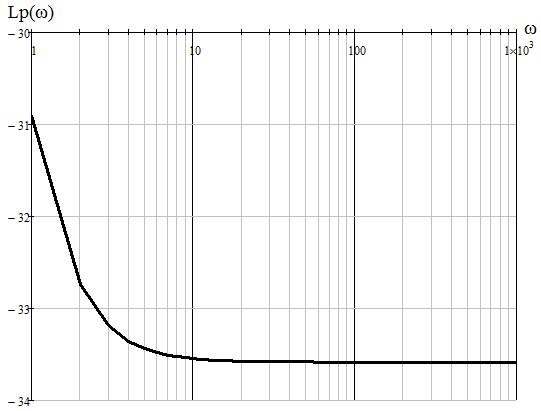

Рисунок 15 – ЛАЧХ и ЛФЧХ регулятора
-
на втором этапе, по результатам первого, в плоскости параметров регулятора
 или
или
 строится граница области заданной
колебательности. На границе области
определяют точку с максимальный
значением отношения
строится граница области заданной
колебательности. На границе области
определяют точку с максимальный
значением отношения
 ,
которые и являются оптимальными.
,
которые и являются оптимальными.

Передаточная функция разомкнутой системы:

где Ti равны:





Выражение для КФЧХ:

Запишем выражение для нескольких Ti:






Рисунок 16 – Семейство КФЧХ
Отобразим каждую КФЧХ с окружностью.
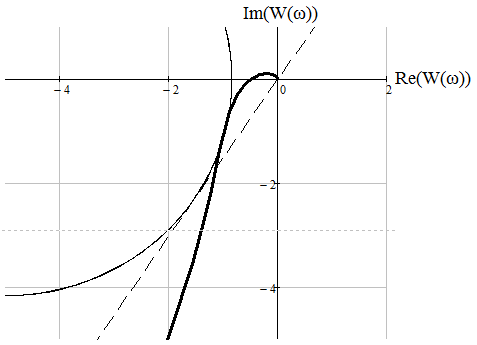
Рисунок 17 – КФЧХ при Ti = 0.6 · TG
Радиус
окружности:

Значит:

Радиус
окружности:

Значит:


Рисунок 18 – КФЧХ при Ti = 0.8 · TG
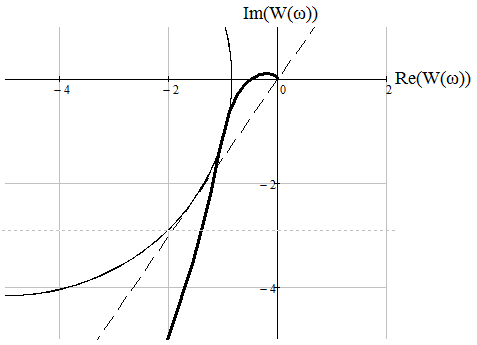
Рисунок 19 – КФЧХ при Ti = TG
Радиус
окружности:

Значит:


Рисунок 20 – КФЧХ при Ti = 1.4 · TG
Радиус
окружности:

Значит:


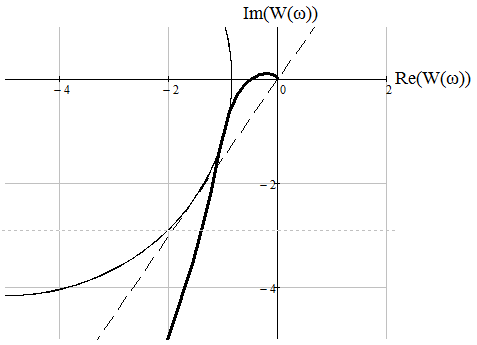
Рисунок 21 – КФЧХ при Ti = 1.8 · TG
Радиус
окружности:

Значит:



Рисунок 22 – Граница области заданной колебательности
Определяем из графика:
-
KAR = 0.656;
-

2.3.1. Расчет переходных характеристик оптимизированной системы электропривода по управляющему и возмущающему воздействию
Переходная характеристика по управляющему воздействию:

Переходная характеристика по возмущающему воздействию:

Используем обратное преобразование Лапласа и построим сравнительные графики для обоих способов оптимизации.

Рисунок 23 – Переходные характеристики по управляющему воздействию для параметрической и модульной оптимизации
Как видно по графикам переходного процесса, время переходного процесса:
-
для параметрической оптимизации: tпп = 0.44с;
-
для модульной: tпп = 0.5с.
Как видно, графики переходного процесса для модульной оптимизации лучше, имею большую точность и меньшее время переходного процесса. В качестве базовой возьмем именно эту оптимизацию.
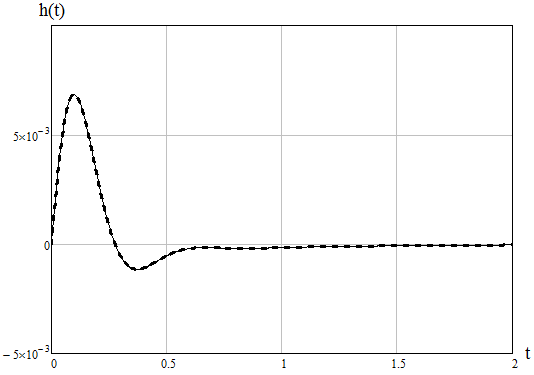
Рисунок 24 – Переходные характеристики по возмущающему воздействию для параметрической и модульной оптимизации
2.4. Расчет параметров регулятора скорости
Регуляторы современных автоматизированных электроприводов выполняются на операционных усилителях. Система управления автоматизированным электроприводом с ПИ-регулятором приведена на рисунке 25.
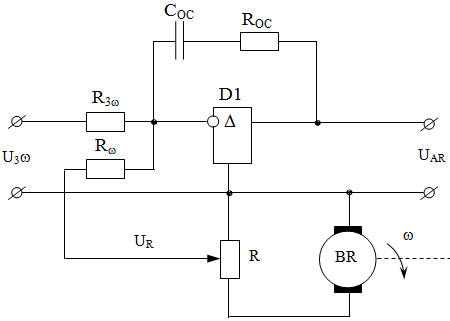
Рисунок 25 – Схемная реализация ПИ-регулятора
При расчете RC-цепей первоначально задаются значением емкости, а затем определяют сопротивление резистора.
Пределы изменения данных следующие:


Примем:

и
возьмем величину емкости конденсатора
равной
 Тогда:
Тогда:

Затем по известному значению коэффициента передачи регулятора определяют значение сопротивления R2:
