

1. Кинематический расчёт механизма
-
.Структурный анализ механизма
Любой плоский механизм можно представить как совокупность кинематических цепей, одна из которых имеет подвижность равную подвижности механизма и называется исходным механизмом, а остальные имеют подвижность равную нулю. Кинематические цепи с нулевой подвижностью получили название структурных групп или групп Ассура.
Структурной группой называют простейшую кинематическую цепь, содержащую пары 5 класса и теряющую столько степеней свободы после присоединения к стойке, сколько она имела до соединения.
Подвижность механизма определим по формуле Чебышева [1]
W=3n-2P5-P4, (1.1)
где n - число подвижных звеньев;
Р5 - кинематических пар 5 класса; P4- число кинематических пар 4 класса;
Подвижность показывает сколько независимых движений нужно сообщить звеньям механизма, чтобы обеспечить определённость движения последнего.
В нашем случае W=3*5-2*7=l, следовательно, в механизме одно звено, способное совершать независимое движение.
Механизм качающегося конвейера состоит из 6 звеньев:
О1 - стойка, О1А - кривошип, АВ - шатун, О2 B- коромысло, C4- камень кулисы, F - ползун.
Структурная схема механизма приведена на рис. 1.
Формула образования механизма
![]()
Наиболее высокий класс группы, входящей в состав механизма равен II, следовательно, наш механизм второго класса, второго порядка.
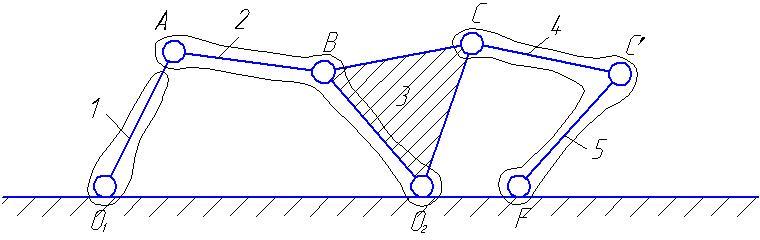
Рис. 1. Структурная схема механизма.
Кинематический расчёт скоростей и ускорений начинают с исходного механизма и приводят в порядке присоединения структурных групп к исходному механизму.
Силовой расчёт начинают с последней в формуле строения структурной группы и проводят в обратном порядке присоединения структурной группы к исходному механизму, то есть исходный механизм рассчитывают в последнюю очередь.
1.2. Разметка механизма
Разметкой механизма называется ряд последовательных положений его звеньев в зависимости от положения начального звена, охватывающий весь цикл движения этого звена.
В
выбранном масштабе, характеризуемом
масштабным коэффициентом
μ![]() =0.001
м/мм,
на горизонтальной прямой отложим
отрезок, равный
=0.001
м/мм,
на горизонтальной прямой отложим
отрезок, равный
![]() ,
далее вверх
,
далее вверх
![]() для определения положения стойки
для определения положения стойки
![]() ,
и
,
и
![]() для определения положения направляющей
звена 5. Из точки
для определения положения направляющей
звена 5. Из точки
![]() радиусом
радиусом
![]() проводим окружность, траекторию движения
точки А
кривошипа АВ.
Из точки
проводим окружность, траекторию движения
точки А
кривошипа АВ.
Из точки
![]() проводим окружность радиусом
проводим окружность радиусом
![]() ,
траекторию движения точки В
кривошипа АВ
и точки С
ползуна (рис. 2).
,
траекторию движения точки В
кривошипа АВ
и точки С
ползуна (рис. 2).
Для дальнейшего построения разметки сначала нужно определить крайние положения механизма.
Крайние
положения механизма определяются
взаимным расположением кривошипа и
шатуна, поэтому построение крайних
положений начинаем с этих звеньев.
Крайние положения точки А
будут определяться в двух случаях,
когда кривошип и шатун будут параллельны
сами себе, то есть в первом случае шатун
и кривошип сложатся в одну линию, и во
втором случае – шатун и кривошип
вытянуться в одну линию. Полученные
точки обозначаем
![]() ,
далее определяем крайние положения
точек
,
далее определяем крайние положения
точек
![]() ,
,![]() и
и
![]() .
.
Расстояние
на окружности движения кривошипа между
полученными точками А0
и А6
соответствует рабочему ходу механизма,
расстояние от А6
до А12
соответствует холостому ходу,
соответственно, разбиваем каждый на 6
равных частей. Получаем 10 промежуточных
положений точек А,
определяющих положения кривошипа
![]() .
С
помощью геометрических построений
определяем 10 положений точек В,
С.
Центр тяжести звена АВ
определяем из условия
.
С
помощью геометрических построений
определяем 10 положений точек В,
С.
Центр тяжести звена АВ
определяем из условия
![]() .
Центр тяжести звена
.
Центр тяжести звена
![]() находится в точке С
коромысла. Центр тяжести звеньев 4,
находится в точке С,
и 5 находится в точке F.
находится в точке С
коромысла. Центр тяжести звеньев 4,
находится в точке С,
и 5 находится в точке F.

Рис. 2. Разметка механизма.