

1.5. Кинематический расчёт механизма методом кинематических диаграмм
Диаграмма перемещения выходного звена или функция положения механизма строится в зависимости от функции времени. Для построения и дальнейших расчетов выбираем масштабные коэффициенты по оси абцисс
![]() ,
,
![]() .
.
На графике отрезок на оси абцисс берем равным 180мм. Масштаб по оси ординат выбираем равным масштабу с разметки кинематической схемы механизма
![]() .
.
После масштабных коэффициентов приступаем к построению диаграммы перемещения точки F выходных звеньев в системе координат S(t). Для этого на оси абсцисс откладываем отрезок 0-12 равный 180мм. Затем делим отрезок на 12 частей и отмечаем точки 0, 1, 2,…, 12. Проводим ординатные прямые через эти точки и на этих прямых с учетом выбранного масштаба, откладываем перемещения точки F , определяемые по формуле
![]() =
=![]() ,
(1.17)
,
(1.17)
где
![]() -
перемещение точки F.
Соединив точки 0, 1,…, 12 плавной кривой,
получим диаграмму перемещения точки F
(рис.
5).
-
перемещение точки F.
Соединив точки 0, 1,…, 12 плавной кривой,
получим диаграмму перемещения точки F
(рис.
5).
По результатам плана скоростей строим кинематическую диаграмму скорости выходного звена, для этого c учетом выбранного масштаба, откладываем скорости точки F, определяемые по формуле
![]() =
=![]() ,
,![]() (1.18)
(1.18)
где
![]() -
масштабный
коэффициент, выбранный на диаграмме
скоростей по оси ординат.
-
масштабный
коэффициент, выбранный на диаграмме
скоростей по оси ординат.
Определив
![]() для остальных
положений строим
график
для остальных
положений строим
график
![]() .
Порядок построения тот же, что и при
построении графика перемещений.
.
Порядок построения тот же, что и при
построении графика перемещений.
Диаграмму ускорения точки F строим методом графического дифференцирования, способом хорд (рис. 6).
Проводим хорду, которая соединяет концы начальной и конечной ординат кривой на данном интервале, на диаграмме скоростей.
По оси абсцисс выбираем произвольную точку Н, в данном случае Н=20 мм в качестве полюса. Из этой точки проводим до пересечения с осью ординат луч, параллельный хорде.
Таким же образом рассмотрим все интервалы. В результате получим ряд точек, каждая из которых расположена в середине соответствующего интервала. Затем соединяем эти точки плавной кривой и получаем искомый график.
Масштабный коэффициент по оси ординат определяется как [1]
![]() .
(1.19)
.
(1.19)
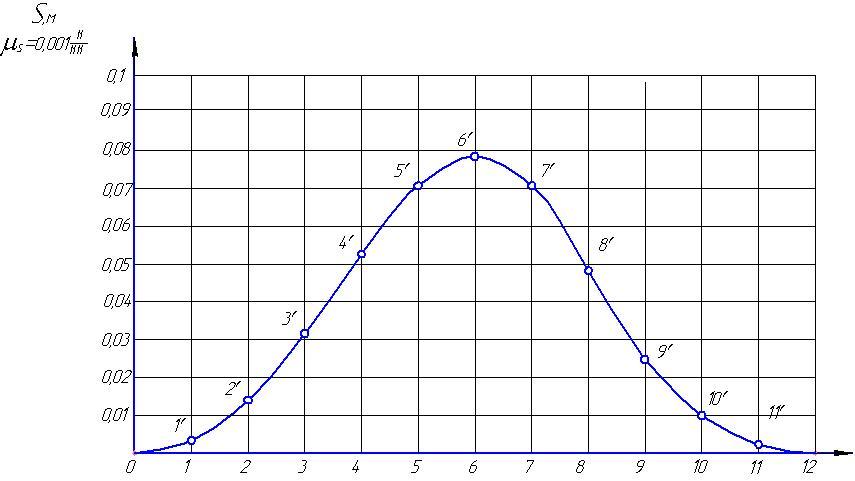
Рис. 5. Пример построения кинематической диаграммы перемещений.
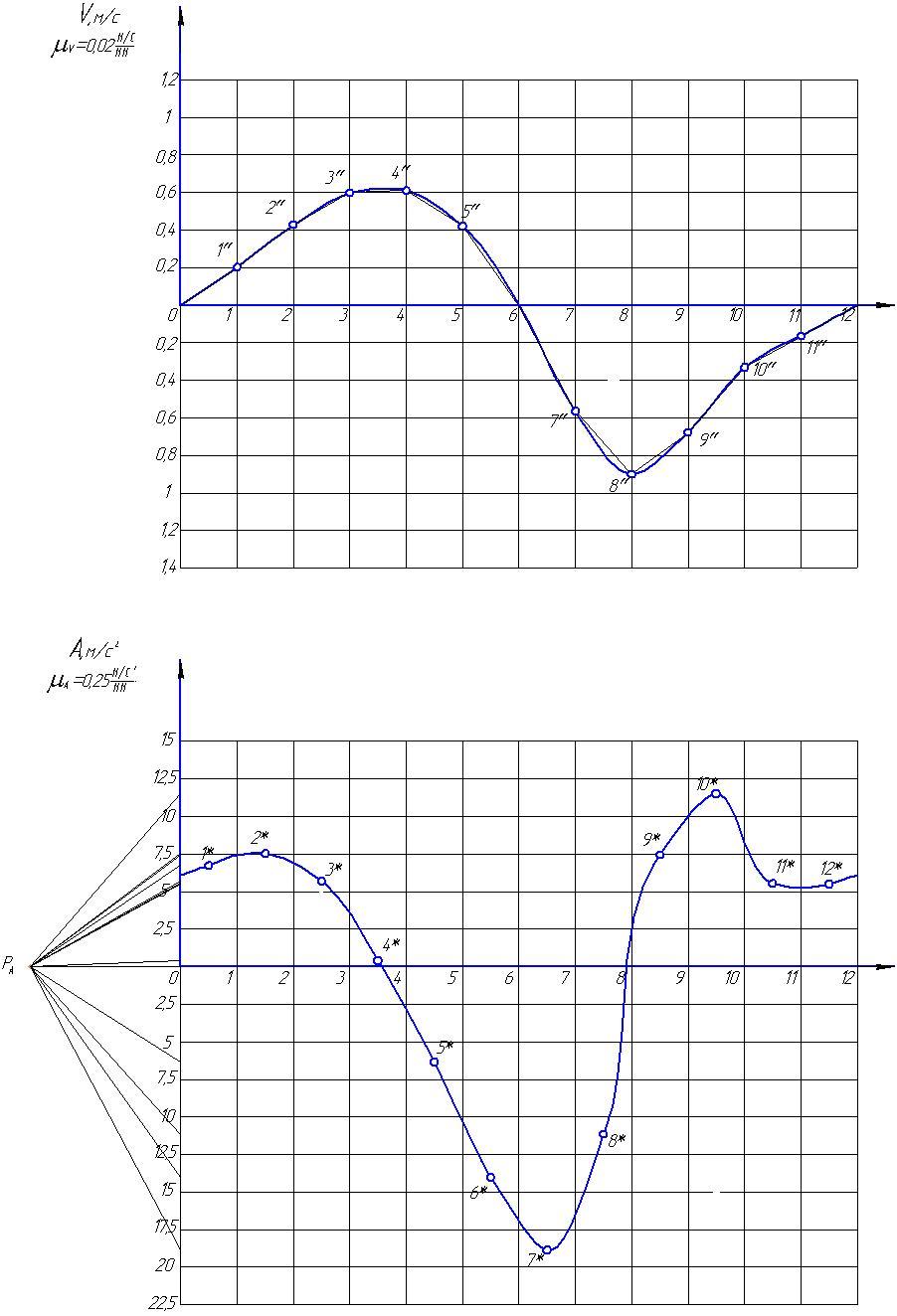
Рис. 6. Пример построения кинематических диаграмм скорости и ускорения.
2. Динамический расчёт механизма
Задачей данного раздела курсового проекта является определение момента инерции маховика, обеспечивающего заданную величину коэффициента неравномерности движения, и построение графика угловой скорости вращения входного звена механизма в установившемся режиме.
2.1. Построение силовой диаграммы и диаграммы сил полезного сопротивления
В задании имеем силовую диаграмму, которую перенесем на лист (рис. 7).

Рис. 7. Силовая диаграмма
Далее
для графика сил полезного
![]() сопротивления
выберем систему координатных осей по
оси абсцисс графика примем масштабные
коэффициенты равными
сопротивления
выберем систему координатных осей по
оси абсцисс графика примем масштабные
коэффициенты равными
![]() ,
,
![]() .
.
На оси
абсцисс откладываем отрезок 0-12
равный
180мм.
Затем этот
отрезок делим на 12 равных частей, каждая
из которых представляет собой отрезок,
выражающий угол поворота кривошипа
между соседними его положениями и
обозначим деления от 0 до 12. Вдоль оси
ординат в масштабе
![]() будем откладывать отрезки выражающие
значения силы полезного сопротивления
Рm.
будем откладывать отрезки выражающие
значения силы полезного сопротивления
Рm.