

3.3 Силовой расчет ведущего звена
Зарисовываем звено в масштабе μl=0,002м/мм , прикладывая в точку А
известную
реакцию
![]() (которая
равна и противоположна по направлению
(которая
равна и противоположна по направлению
![]() ).
Освобождаем звено от связей со
стойкой и прикладываем вместо нее
реакцию
).
Освобождаем звено от связей со
стойкой и прикладываем вместо нее
реакцию![]() .Уравновешивающую
момент
.Уравновешивающую
момент
![]() направляем в сторону вращения кривошипа.
На кривошип действует сила веса
направляем в сторону вращения кривошипа.
На кривошип действует сила веса
![]() (рис. 18).
(рис. 18).
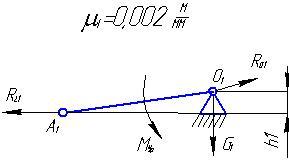
Рис. 18. Схема нагружения ведущего звена механизма.
Запишем векторное уравнение сил, действующих на ведущее звено
![]() .
(3.8)
.
(3.8)
Из всех сил
действующих на кривошип, неизвестными
являются величина и направление реакции
![]() .
Строим план сил, в предварительно
выбранном масштабе
.
Строим план сил, в предварительно
выбранном масштабе
![]() и определим из него вектор искомой
реакции
и определим из него вектор искомой
реакции
![]() (рис. 19).
(рис. 19).

Рис. 19. Пример построения плана сил ведущего звена механизма.
Уравновешивающий
момент
![]() можно определить из уравнения равновесия
кривошипа
можно определить из уравнения равновесия
кривошипа
![]() .
(3.9)
.
(3.9)
Решая уравнение,
получаем
![]() .
.
Результаты заносим в таблицу.
Таб.9
-


1016,86
300
1058,97
11,7955
Для положения № 2
Таб.10
-




1076,59
300
1178,92
40,372125
3.4 Определение уравновешивающего момента силы методом
«жесткого рычага» Н.Е. Жуковского
Для проверки правильности построения планов сил и определения реакций в кинематических парах механизма необходимо определить уравновешивающую силу на входном звене с помощью теоремы Н.Е.Жуковского о «жестком рычаге»[2].
Переносим все силы
с плана сил на план скоростей, повёрнутый
на 90˚ по часовой стрелки, относительно
его нормального положения. В концы
векторов скоростей точек, в которых
действуют приложенные к механизму силы
или центров масс переносим их, сохраняя
направление. Вместо уравновешивающего
момента
![]() прикладываем силу
прикладываем силу
![]() действующую перпендикулярно кривошипу
и направленную в сторону вращения
кривошипа, относительно полюса Р
(рис. 20). Также заменим моменты инерции
следующими выражениями
действующую перпендикулярно кривошипу
и направленную в сторону вращения
кривошипа, относительно полюса Р
(рис. 20). Также заменим моменты инерции
следующими выражениями
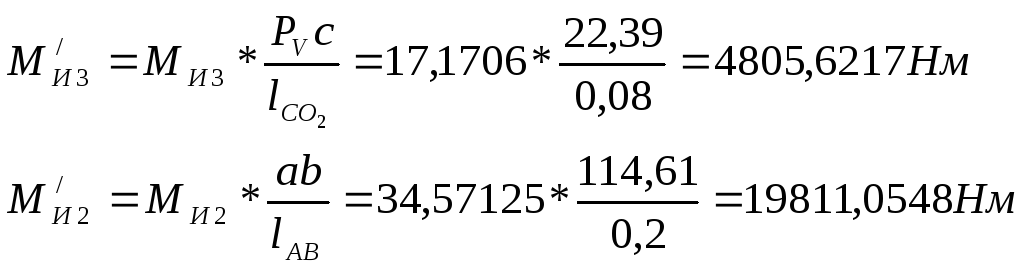 ,
,
где
![]() -
длины звеньев AB,CO2
соответственно, м.
-
длины звеньев AB,CO2
соответственно, м.
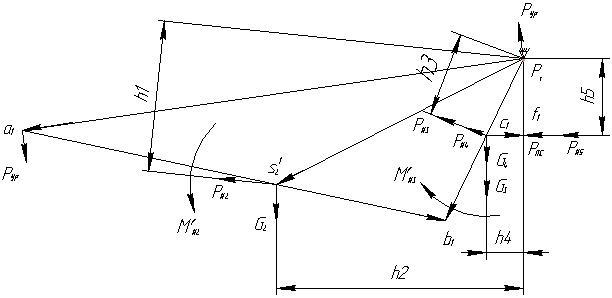
Рис. 20. Расчёт сил методом рычага Н.Е. Жуковского.
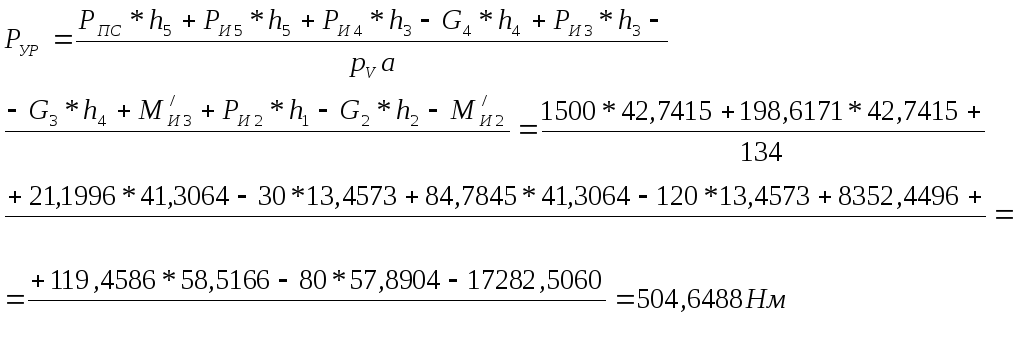
Составляем уравнение равновесия плана скоростей как условного жесткого рычага относительно полюса плана скоростей
![]() ,
(3.10)
,
(3.10)
где
![]() -
соответствующие плечи данных сил,
-
соответствующие плечи данных сил,
![]() -
плечо силы
-
плечо силы
![]() .
.
Решая это уравнение
относительно
![]() ,
получаем
,
получаем
 .
.
Полученный результат
расчета
![]() умножаем на длину звена O1A,
м. Получаем
умножаем на длину звена O1A,
м. Получаем
![]() .
.
Данный результат сравниваем с результатом расчетом, полученным с помощью плана сил.
 ,
(3.11)
,
(3.11)
где
![]() -
величина уравновешивающего момента,
вычисленная по методу Жуковского,
-
величина уравновешивающего момента,
вычисленная по методу Жуковского,
![]() -
величина уравновешивающего момента,
вычисленная методом планов.
-
величина уравновешивающего момента,
вычисленная методом планов.
Для положения № 2
 ,
,
 ,
,
![]() ,
,
 .
.