

11.3. Экспорт модели
Команда File/Export позволяет выполнить экспорт модели в виде матриц уравнений пространства состояния в рабочую область MATLAB или в файл. При выполнении этой команды открывается окно диалога (см. рис. 11.9) в котором необходимо выбрать вариант экспорта.
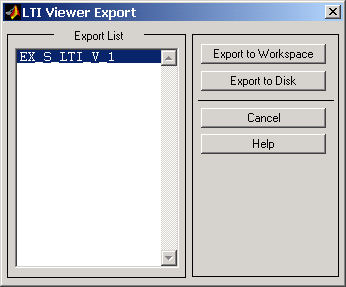
Рис. 11.9. Окно диалога при экспорте модели.
В случае экспорта в рабочую область MATLAB в ней появляется структура с именем имя_модели_1 (при последующих операциях экспорта имя_модели_2, имя_модели_3 и т.д.). Для рассматриваемой модели с именем EX_S_LTI_V.mdl имя структуры будет EX_S_LTI_V_1 . Для просмотра значений матриц уравнений пространства состояния необходимо ввести в командной строке MATLAB имя структуры и нажать клавишу Enter на клавиатуре. В командном окне появится распечатка значений матриц:
>> EX_S_LTI_V_1 % Ввод с клавиатуры (символы >> не вводятся)
a = EX_S_LTI_V/T EX_S_LTI_V/T EX_S_LTI_V/T EX_S_LTI_V/T -0.5 -1 -10 EX_S_LTI_V/T 1 0 0 EX_S_LTI_V/T 0 1 -10
b = Input Point EX_S_LTI_V/T 1 EX_S_LTI_V/T 0 EX_S_LTI_V/T 0
c = EX_S_LTI_V/T EX_S_LTI_V/T EX_S_LTI_V/T Output Point 0 1 0
d = Input Point Output Point 0
Continuous-time model.
Для работы с матрицами удобно извлечь их из структуры командами вида:
A = имя_структуры.a B = имя_структуры.b C = имя_структуры.c D = имя_структуры.d
Применительно к рассматриваемой модели эти команды будут выглядеть следующим образом:
>> A=EX_S_LTI_V_1.a % Ввод с клавиатуры (символы >> не вводятся) A = -0.5000 -1.0000 -10.0000 1.0000 0 0 0 1.0000 -10.0000
>> B=EX_S_LTI_V_1.b % Ввод с клавиатуры (символы >> не вводятся) B = 1.0000 0 0
>> C=EX_S_LTI_V_1.c % Ввод с клавиатуры (символы >> не вводятся) C = 0 1.0000 0
>> D=EX_S_LTI_V_1.d % Ввод с клавиатуры (символы >> не вводятся) D = 0
Сформированные в рабочей области матрицы A, B, C и D могут использоваться для дальнейших преобразований (создание LTI-объектов, переход к передаточным функциям, переход к дискретным моделям и т.д.).
12. Основные команды matlab для управления Simulink-моделью
При разработке графического интерфейса пользователя, создании S-функций и т.п. задач требующих управления конфигурацией, параметрами и работой Simulink-модели допускается использовать специальные команды (функции) языка MATLAB. С помощью таких команд можно открывать и закрывать модель, запускать модель на расчет, добавлять и убирать блоки, изменять параметры блоков и осуществлять иные операции с моделью.
12.1. Add_block
Назначение: Добавление нового блока в модель
Синтаксис:
add_block('src', 'dest')
Команда добавляет блок, полный путь которого задан параметром 'src', в модель в соответствии с путем назначения 'dest'.
add_block('src', 'dest', 'parameter1', value1, ...)
Команда добавляет блок, полный путь которого задан параметром 'src', в модель в соответствии с путем назначения 'dest' и устанавливает значения параметров блока.
Пример 1:
Команда add_block('built-in/Gain', 'EX_add_block/Gain') добавляет в модель EX_add_block.mdl усилитель Gain из встроенной библиотеки.
Пример 2:
Команда add_block('EX_add_block / In1', 'EX_add_block/My_Subsystem / In1')
копирует блок входного порта In1 из модели EX_add_block.mdl в подсистему My_Subsystem той же самой модели.
Пример 3:
Команда add_block('built-in/Constant', 'EX_add_block/Constant','Value','150') добавляет в модель EX_add_block.mdl блок Constant и устанавливает параметр Value этого блока равным 150.
[Скачать пример]