

9.9.4. Управляемая уровнем и фронтом сигнала подсистема Enabled and Triggered Subsystem
Подсистема Enabled and Triggered Subsystem (в дальнейшем ET-подсистема) включается фронтом сигнала поступающего на T-вход системы при наличии положительного сигнала на E-входе системы. Так же как и Triggered Subsystem эта подсистема выполняет вычисления только на том шаге моделирования, где произошло изменение управляющего сигнала на T-входе. Параметр States when enabling блока Enable не оказывает влияния на работу ET-подсистемы.
Оба управляющих сигнала могут быть векторными.
Пример ET-подсистемы дан на рис. 9.9.6.
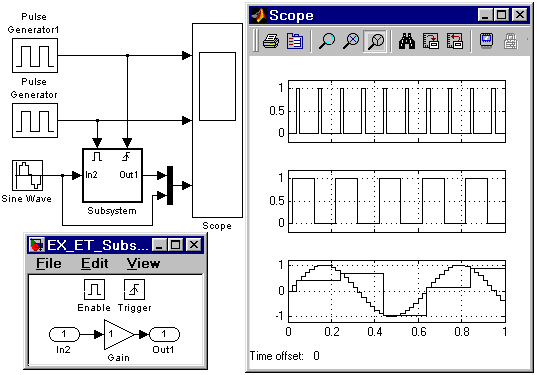
Рис. 9.9.6 Модель, использующая ET-подсистему
[Скачать пример]
9.9.5. Управляемая s-функцией подсистема Function-call subsystem
Function-call subsystem (в дальнейшем FC-подсистема) является T-подсистемой, предназначенной для использования совместно с S-функцией написанной на языке C. Используя специальные средства, можно обеспечить выполнение подсистемы во время выполнения S-функции. На время выполнения FC-подсистемы работа S-функции останавливается, а по окончании выполнения FC-подсистемы работа S-функции возобновляется. Таким образом, FC-подсистема обеспечивает создание S-функций, запускающих подсистемы составленные из Simulink-блоков. Механизм создания таких S-функций описан в документации Simulink, посвященной созданию S-функций.
Для работы с FC-подсистемой можно использовать также Function-Call Generator и средства пакета событийного моделирования Stateflow.
9.9.6. Блок условного оператора If
Назначение:
Обеспечивает формирование управляющих сигналов для подсистем If Action
Subsystem. Блок является аналогом оператора if-else языка программирования C.
Параметры:
Number of inputs – Количество входов.
If expression – Условное выражение. Условное выражение может включать в себя следующие знаки: <. <=, ==, ~=, >, >=, &, |, [ ], а также унарный минус. Если записанное условное выражение истинно, то на выходном If-порту блока формируется управляющий сигнал.
Elseif expressions – Одно или список альтернативных условных выражений разделенных запятыми, вычисляющихся, если условное выражение If expression ложно. Каждому условному выражению, записанному в списке Elseif expressions соответствует выходной Elseif-порт на котором формируется управляющий сигнал, если соответствующее условное выражение истинно. При этом алгоритм вычисления альтернативных условных выражений таков, что если одно из альтернативных условных выражений окажется истинным, то следующие в списке выражения не проверяются. Альтернативное условное выражение может включать в себя те же знаки, что и выражение If expression.
Show else condition (флажок) – Показать Else-порт. На Else-порту формируется управляющий сигнал, если условное выражение и все альтернативные условные выражения ложны.
На пиктограмме блока отображаются условные выражения, записанные в его параметрах. Добавление каждого нового альтернативного условного выражения приводит к появлению нового Elseif выходного порта.
Если входные сигналы блока являются скалярами, то для их обозначения в выражениях используется запись вида u1, u2 ,u3 и т.д. Если входные сигналы векторные, то для обозначения элементов вектора используются выражения вида u1(1), u1(2), u2(1), u2(2) и т.д.
На рис. 9.9.7 показан пример использования блока If совместно с подсистемами If Action Subsystem. В примере первая подсистема пропускает через себя входной сигнал если входной сигал блока If больше 1, вторая – если входной сигнал меньше –1 (минус один), и третья – если входной сигнал лежит в интервале от -1 до +1.
С-код, соответствующий алгоритму работы блока If в приведенном примере выглядит следующим образом:
if (u1 > 1) { If Action Subsystem 1; } elseif (u1 < -1){ If Action Subsystem 2; } else { If Action Subsystem 3; }
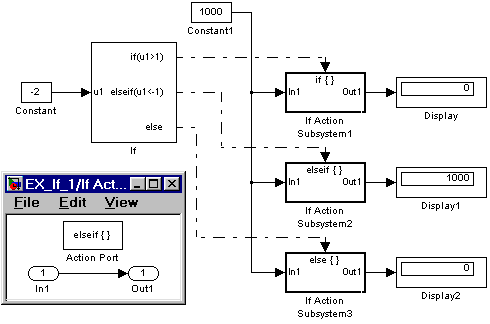
Рис. 9.9.7 Использование блока If совместно с подсистемами If Action Subsystem
[Скачать пример]