

9.4.4. Блок дискретного интегратора Discrete-Time Integrator
Назначение:
Блок используется для выполнения операции интегрирования в дискретных системах.
Параметры:
Integration method – Метод численного интегрирования:
Forward Euler - Прямой метод Эйлера.
Метод использует аппроксимацию T/(z-1) передаточной функции 1/s. Выходной сигнал блока рассчитывается по выражению: y(k) = y(k–1) + T*u(k–1), y – выходной сигнал интегратора, u – входной сигнал интегратора, T – шаг дискретизации, k – номер шага моделирования.
Backward Euler – Обратный метод Эйлера.
Метод использует аппроксимацию T*z/(z–1) передаточной функции 1/s. Выходной сигнал блока рассчитывается по выражению: y(k) = y(k–1) + T*u(k).
Trapeziodal – Метод трапеций.
Метод использует аппроксимацию T/2*(z+1)/(z–1) передаточной функции 1/s. Выходной сигнал блока рассчитывается по выражению: x(k) = y(k–1) + T/2 * u(k–1).
Sample time — Шаг дискретизации по времени.
Остальные параметры дискретного интегратора те же, что и у блока аналогового интегратора Integrator (библиотека Continuous).
На рис. 9.4.5 показан пример демонстрирующий все три способа численного интегрирования блока Discrete-Time Integrator. Как видно из рисунка изображение блока меняется в зависимости от выбранного метода интегрирования.
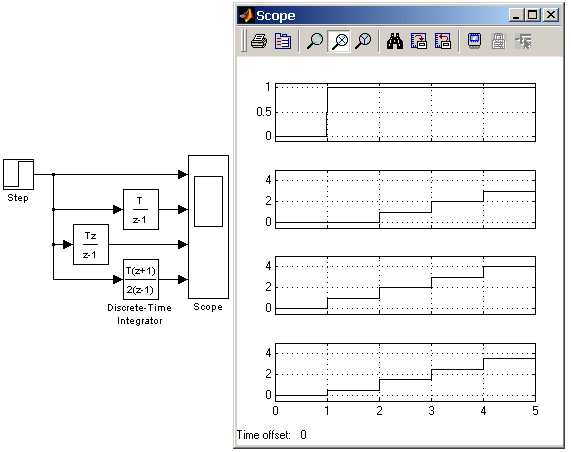
Рис. 9.4.5. Выполнение интегрирования блоками Discrete-Time Integrator, реализующими разные численные методы.
[Скачать пример]
9.4.5. Дискретная передаточная функция Discrete Transfer Fсn
Назначение:
Блок Discrete Transfer Fcn задает дискретную передаточную функцию в виде отношения полиномов:
 ,
,
где
m+1 и n+1 – количество коэффициентов числителя и знаменателя, соответственно. num – вектор или матрица коэффициентов числителя, den – вектор коэффициентов знаменателя.
Параметры:
Numerator — Вектор или матрица коэффициентов числителя
Denominator – Вектор коэффициентов знаменателя
Sample time — Шаг дискретизации по времени.
Порядок числителя не должен превышать порядок знаменателя.
Входной сигнал блока должен быть скалярным. В том случае, если коэффициенты числителя заданы вектором, то выходной сигнал блока будет скалярным (также как и входной сигнал). На рис. 9.4.6 показан пример использования блока Discrete Transfer Fcn. В примере рассчитывается реакция на единичное ступенчатое воздействие дискретного аналога колебательного звена:
![]() .
.
Шаг дискретизации выбран равным 0.5 с.
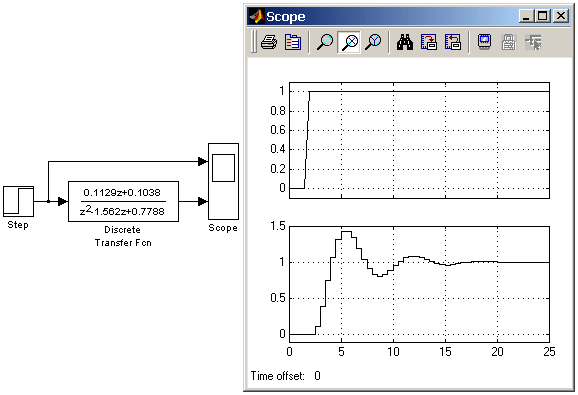
Рис. 9.4.6. Использование блока Discrete Transfer Fcn
[Скачать пример]
9.4.6. Блок дискретной передаточной функции Discrete Zero-Pole
Назначение:
Блок Discrete Zero-Pole определяет дискретную передаточную функцию с заданными полюсами и нулями:
![]() ,
,
где
Z – вектор или матрица нулей передаточной функции, P – вектор полюсов передаточной функции, K – коэффициент передаточной функции, или вектор коэффициентов, если нули передаточной функции заданы матрицей. При этом размерность вектора K определяется числом строк матрицы нулей.
Параметры:
Zeros – Вектор или матрица нулей.
Poles – Вектор полюсов.
Gain – Скалярный или векторный коэффициент передаточной функции.
Sample time — Шаг дискретизации по времени.
Количество нулей не должно превышать число полюсов передаточной функции.
В том случае, если нули передаточной функции заданы матрицей, то блок Discrete Zero-Pole моделирует векторную передаточную функцию.
Нули или полюса могут быть заданы комплексными числами. В этом случае нули или полюса должны быть заданы комплексно-сопряженными парами полюсов или нулей, соответственно.
Начальные условия при использовании блока Discrete Zero-Pole полагаются нулевыми.
На рис. 9.4.7 показан пример использования блока Discrete Zero-Pole. С помощью рассматриваемого блока моделируется дискретный аналог передаточной функции
![]() .
.
Шаг дискретизации выбран равным 0.5 с.
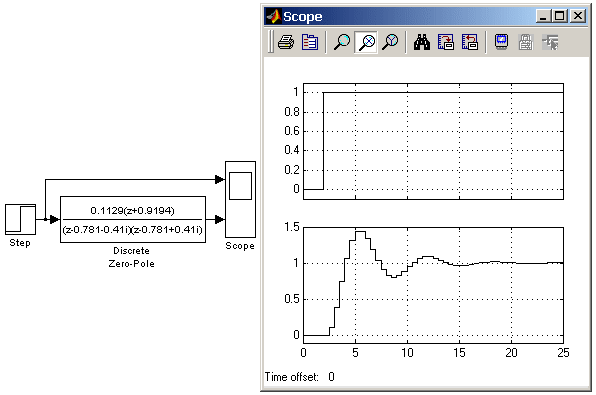
Рис. 9.4.7. Использование блока Discrete Zero-Pole.
[Скачать пример]