

9.2.8. Концевой приемник Terminator
Назначение:
Блок используется для подачи сигнала с неиспользуемого выхода другого блока.
Параметры:
Нет.
В том случае, если выход блока оказывается не подключенным ко входу другого блока, Simulink выдает предупреждающее сообщение в командном окне MATLAB. Для исключения этого необходимо использовать блок Terminator. На рис. 9.2.19 показан пример использования концевого приемника. Извлекаемый, с помощью блока Demux, из матрицы второй элемент не никак не используется, поэтому он подается на вход блока Terminator.
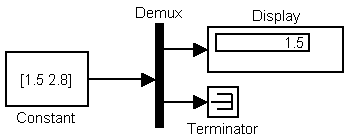
Рис. 9.2.19. Применение блока Terminator
[Скачать пример]
9.2.9. Блок выходного порта Outport
Назначение:
Создает выходной порт для подсистемы или для модели верхнего уровня иерархии.
Параметры:
Port number – номер порта.
Output when disabled – вид сигнала на выходе подсистемы, в случае если подсистема выключена. Используется для управляемых подсистем. Может принимать значения (выбираются из списка):
held – выходной сигнал подсистемы равен последнему рассчитанному значению.
reset – – выходной сигнал подсистемы равен значению задаваемому параметром Initial output.
Initial output - значение сигнала на выходе подсистемы до начала ее работы и в случае, если подсистема выключена. Используется для управляемых подсистем.
9.2.9.1. Использование блока Outport в подсистемах
Блоки Outport подсистемы являются ее выходами. Сигнал, подаваемый в блок Outport внутри подсистемы, передается в модель (или подсистему) верхнего уровня. Название выходного порта будет показано на изображении подсистемы как метка порта.
При создании подсистем и добавлении блока Outport в подсистему Simulink использует следующие правила:
При создании подсистемы с помощью команды Edit/Create subsystem выходные порты создаются и нумеруются автоматически начиная с 1.
Если в подсистему добавляется новый блок Outport, то ему присваивается следующий по порядку номер.
Если какой либо блок Outport удаляется, то остальные порты переименовываются таким образом, чтобы последовательность номеров портов была непрерывной.
Если в последовательности номеров портов имеется разрыв, то при выполнении моделирования Simulink выдаст сообщение об ошибке и остановит расчет. В этом случае необходимо вручную переименовать порты таким образом, чтобы последовательность номеров портов не нарушалась.
На рис. 9.2.19 показана модель, использующая подсистему и схема этой подсистемы.
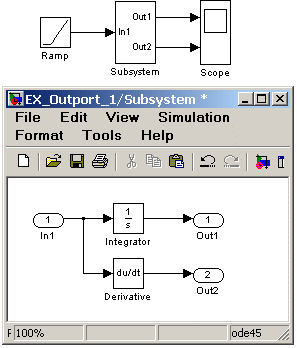
Рис. 9.2.19. Использование блока Outport в подсистеме
[Скачать пример]
В том случае, если подсистема является управляемой, то для ее выходных портов можно задать вид выходного сигнала для тех временных интервалов, когда подсистема заблокирована. На рис. 9.2.20 показана модель, использующая управляемую подсистему (схема подсистемы такая же, как и в предыдущем примере). Для первого выходного порта подсистемы параметр Output when disabled задан как held, а для второго – как reset, причем величина начального значения задана равной нулю. Графики сигналов показывают, что когда подсистема заблокирована, сигнал первого выходного порта остается неизменным, а сигнал второго становится равным заданному начальному значению (нулю).
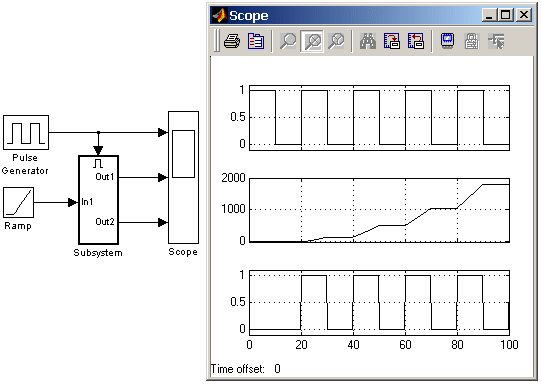
Рис. 9.2.20. Управляемая подсистема с различными настройками выходных портов.
[Скачать пример]
9.2.9.2. Использование блока Outport в модели верхнего уровня
Выходной порт в системе верхнего уровня используется в двух случаях:
Для передачи сигнала в рабочее пространство MATLAB.
Для обеспечения связи функций анализа с выходами модели.
Для передачи сигнала в рабочее пространство MATLAB требуется не только установить в модели выходные порты, но и выполнить установку параметров вывода на вкладке Workspace I/O окна диалога Simulation parameters… (должен быть установлен флажок для параметра Output и задано имя переменной для сохранения данных). Тип сохраняемых данных - Array массив, Structure (структура) или Structure with time (структура с полем “время”) задается на этой же вкладке.
На рис. 9.2.21 показана модель, передающая сигналы в рабочее пространство MATLAB.
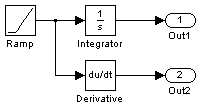
Рис. 9.2.21. Модель, передающая сигналы в рабочее пространство MATLAB с помощью блоков Outport.
[Скачать пример]
Блок Outport может использоваться также для связи модели с функциями анализа, например: linmod или trim.