Пример. Задана желаемая передаточная функция разомкнутой системы ,
где
![]() ,
,![]() .
.
Задана передаточная функция объекта управления
 ,
,
где
![]() ,
,![]() ,
,![]() .
.
Выполнить
синтез алгоритма управления объектом
с заданной передаточной функцией
![]() .
Алгоритм формируется по принципу
линейной обратной связи. Синтезированная
система должна иметь заданное расположение
корней характеристического полинома.
.
Алгоритм формируется по принципу
линейной обратной связи. Синтезированная
система должна иметь заданное расположение
корней характеристического полинома.
Решение. Желаемая передаточная функция замкнутой системы
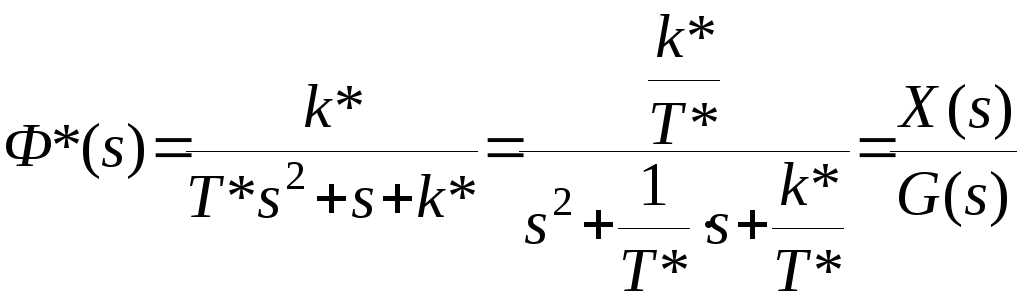 .
.
Характеристическое уравнение замкнутой системы
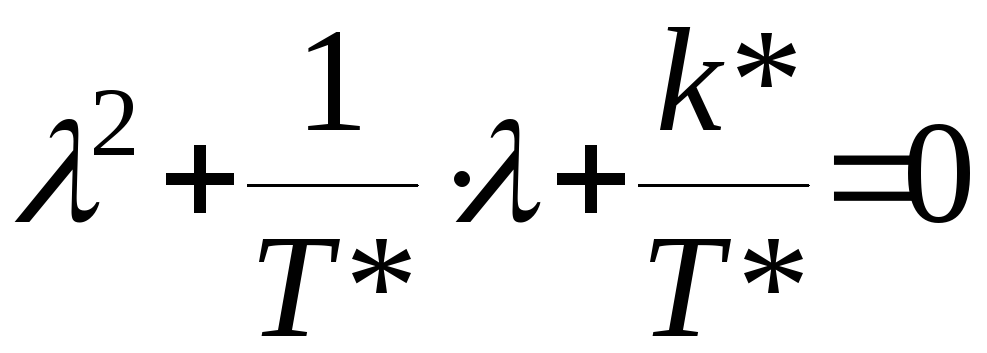 ,
,
или с учетом заданных числовых значений:
![]() .
.
Введем обозначения
 ,
, .
.
В
соответствии с полученной передаточной
функцией
![]() составим уравнения относительно
переменных состояния
составим уравнения относительно
переменных состояния
![]() ,
,
 ,
,
 .
.
или с учетом заданных числовых значений
![]() ,
,
![]() ,
,
![]() .
.
По заданной передаточной функции объекта управления составим уравнение объекта управления относительно переменных состояния
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
или с учетом заданных числовых значений
![]() ,
,
![]() ,
,
![]() .
.
Управляющую функцию ищем в виде:
Тогда управление замкнутой системы:
![]()
 ,
,
![]() ,
,
или
![]() ,
,
![]() ,
,
![]() .
.
Тогда,
для того, чтобы замкнутая система
управления имела заданное расположение
корней характеристического уравнения,
должны выполняться следующие уравнения
![]() ,
,![]() ,
или
,
или![]() ,
,![]() .
.
С учетом заданных числовых значений
![]() ,
,
![]() .
.
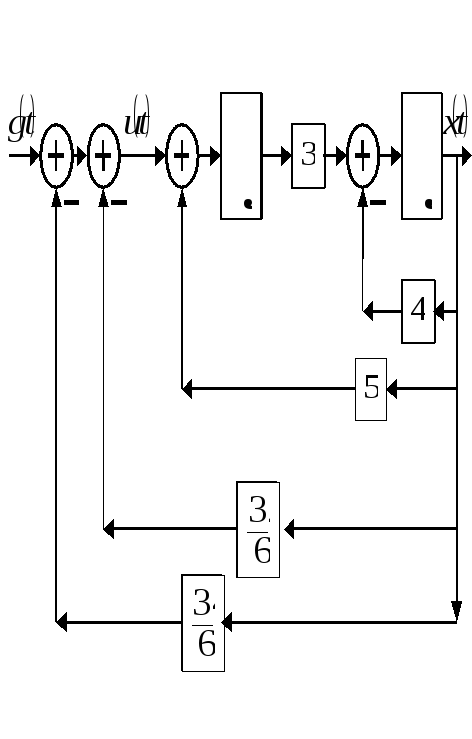
Структурная схема синтезированной системы управления имеет вид, показанный на рисунке
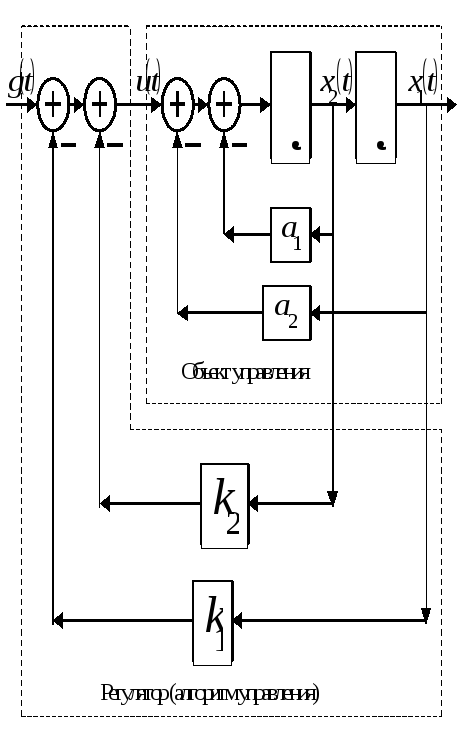
![]()
![]() Пример.
Математическая модель объекта управления
имеет вид
Пример.
Математическая модель объекта управления
имеет вид
![]() ,
,
![]() ,
,
![]() .
.
Найти
коэффициенты
![]() и
и![]() в алгоритме управления
в алгоритме управления
![]()
таким образом, чтобы замкнутая система имела корни характеристического уравнения, равными
![]() ,
,
![]() .
.
Решение. В соответствии с условиями задачи, характеристический полином с заданным расположением корней имеет вид
 .
.
Для заданного объекта управления имеем
 ,
,
 .
.
Проверим условие управляемости объекта уравнением. Для этого составим матрицу управляемости
ее
ранг равен двум, следовательно объект
обладает свойствами управляемости.
Таким образом, задача имеет решение.
Найдем матрицу![]() ,
обратную к матрице
,
обратную к матрице
![]() .
Имеем
.
Имеем
 .
.
Следователно,
 .
.
Воспользуемся равенством
для
того, чтобы найти коэффициенты
характеристического полинома матрицы
![]() имеем
имеем
 .
.
Таким
образом, характеристический полином
матрицы динамики объекта равен
![]() ,
,![]() ,
,![]() .
.
Найдем
матрицу
![]() и обратную к ней матрицу
и обратную к ней матрицу![]()
 ,
,
 .
.
Матрица преобразования исходных переменных состояния объекта управления к канонической форме их записи:
 .
.
И, следовательно
 .
.
Найдем,
теперь искомые коэффициенты
![]() и
и![]() в алгоритме управления
в алгоритме управления
![]() .
.
в
соответствии с формулами
![]() ,
,![]() имеем
имеем
![]() ,
,
![]() .
.
Вычисленные коэффициенты обратных связей алгоритма управления рассчитан для канонических переменных состояния объекта управления. Для того ,чтобы найти коэффициенты обратных связей относительно исходных переменных состояния, необходимо найти
 .
.
Таким образом
 .
.
Следовательно
 ,
, .
.
Итак, окончательно, структурная схема алгоритма управления имеет вид, показанный на рисунке.