

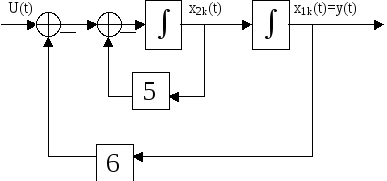
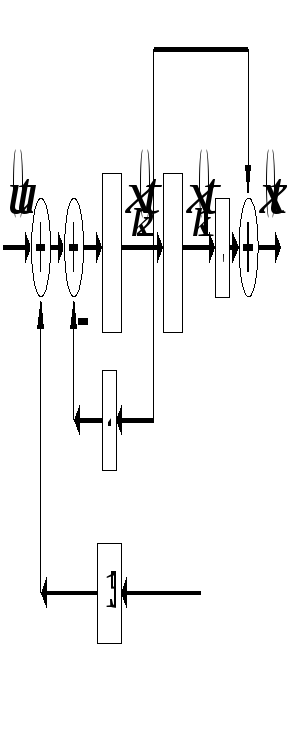
В соответствии с последними уравнениями структурная схема системы имеет вид (сравнить с исходной структурной схемой).
![]()

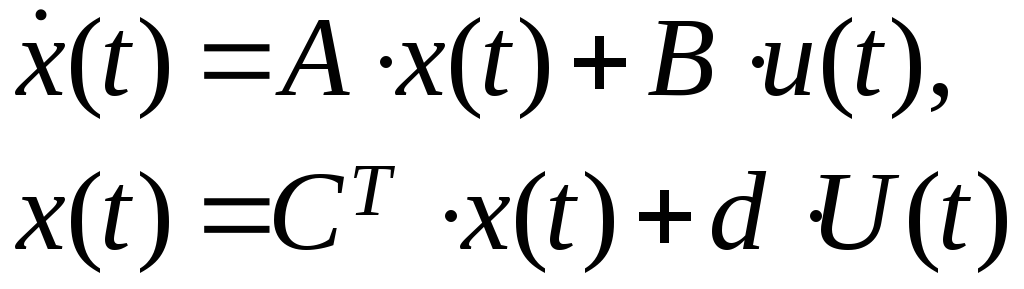
Пример. Система автоматического управления описывается уравнениями
![]() ,
,
![]() ,
,
![]() .
.
П![]() ривести
данную математическую модель системы
к канонической форме записи.
ривести
данную математическую модель системы
к канонической форме записи.
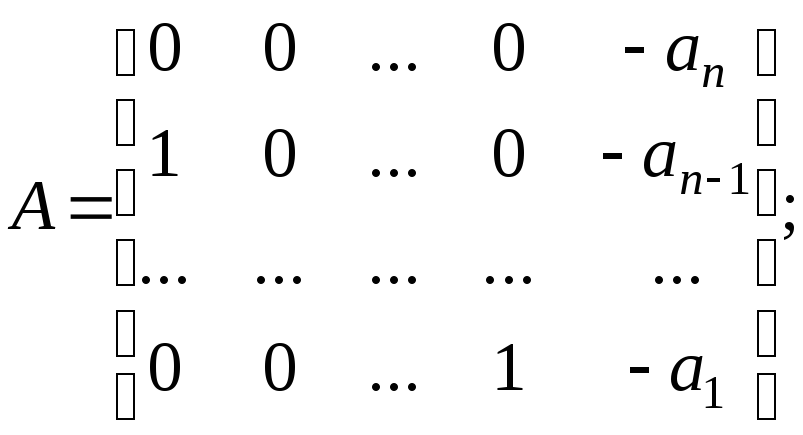
Решение. Для данной системы имеем:
 ,
,
 ,
, .
.
Составляем матрицу управляемости
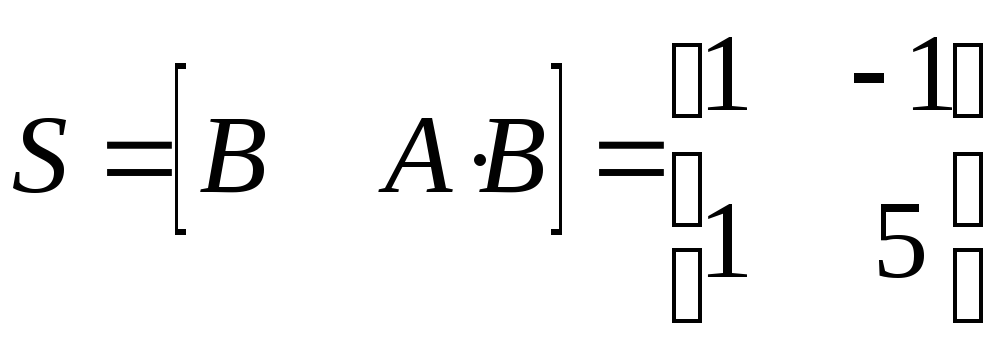 .
.
Ее
ранг равен двум![]() ,
следовательно, система обладает свойством
управляемости. Это значит, что систему
можно привести к канонической форме
управляемости.
,
следовательно, система обладает свойством
управляемости. Это значит, что систему
можно привести к канонической форме
управляемости.
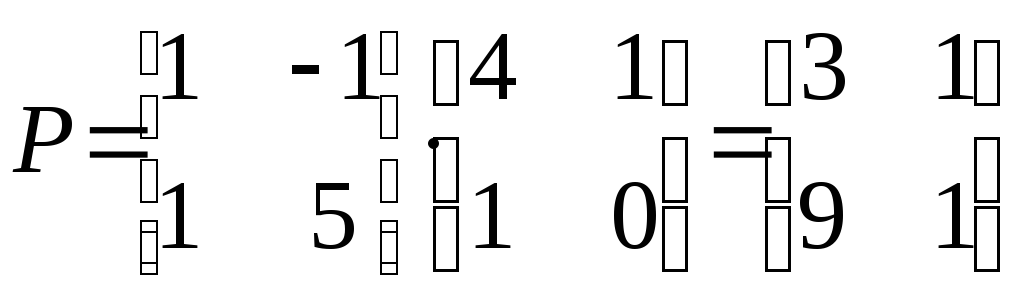
Найдем
матрицу
![]() обратную к матрице
обратную к матрице![]() .
Имеем:
.
Имеем:![]()
 ,
,
Найдем
произведение матриц
![]() :
:
Последний столбец – коэффициенты характеристического полинома с обратными знаками. Характеристический полином
![]() ,
,
поэтому
![]() ,
,![]() .
.
Проверка.
Характеристический полином матрицы
![]() :
:
 ,
,
![]() ,
,
![]() .
.
Найдем
матрицу![]() и обратную к ней
и обратную к ней![]() :
:
 ;
;
![]() ;
;
 .
.
Матрица
преобразования к канонической форме
управляемости
![]()
 .
.
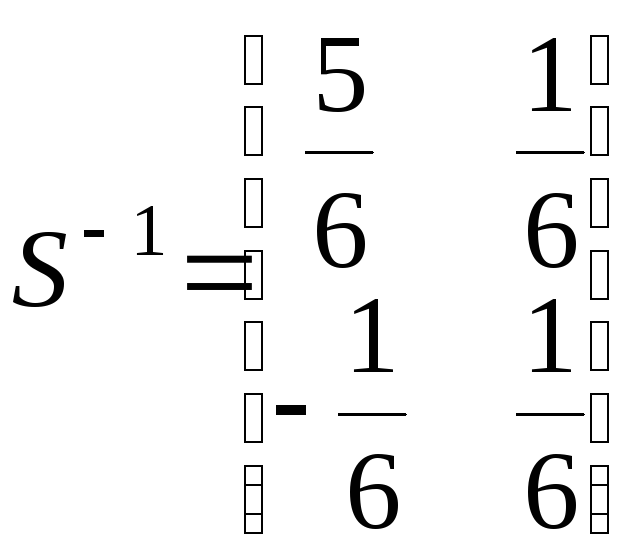
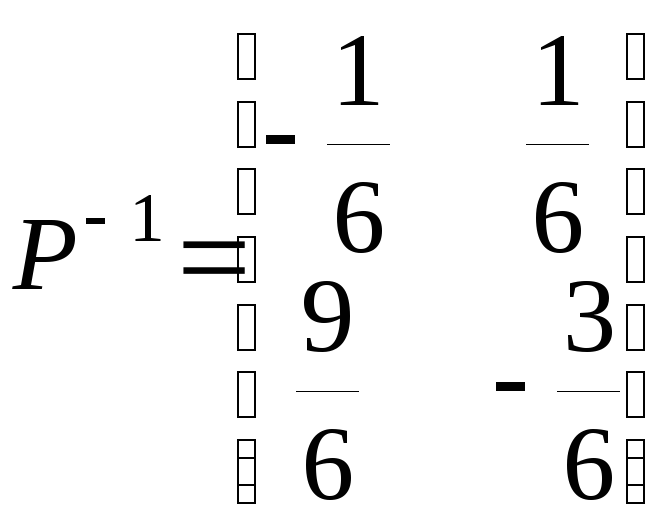
Найдем
обратную матрицу
![]() к матрице
к матрице![]() :
:
![]() ,
,
 .
.
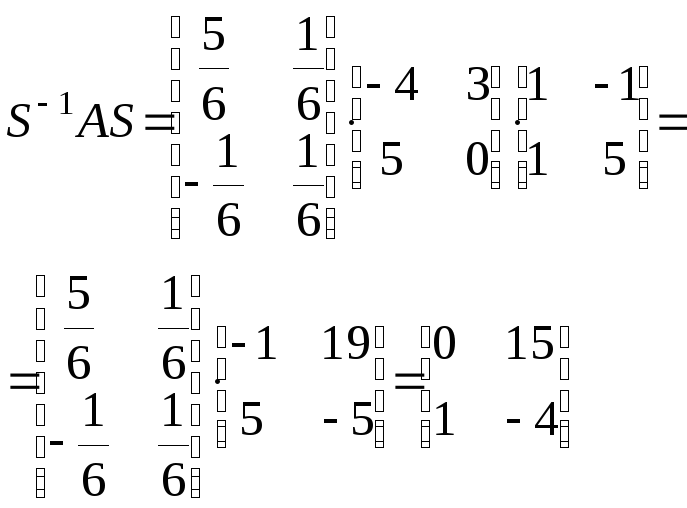
Проверка:
 ,
,
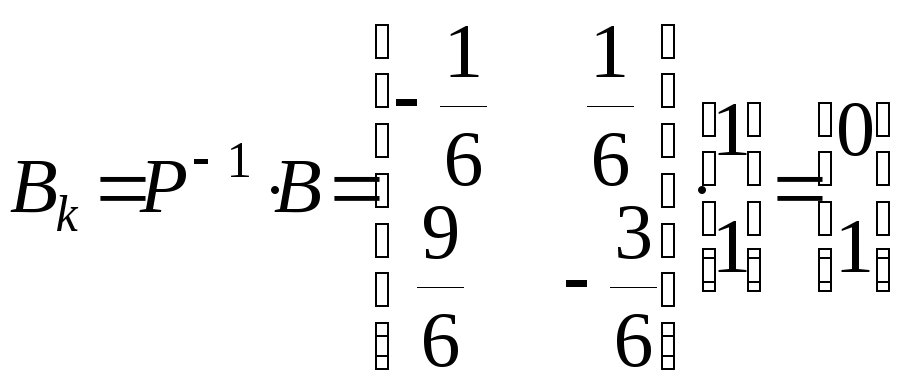 ,
,
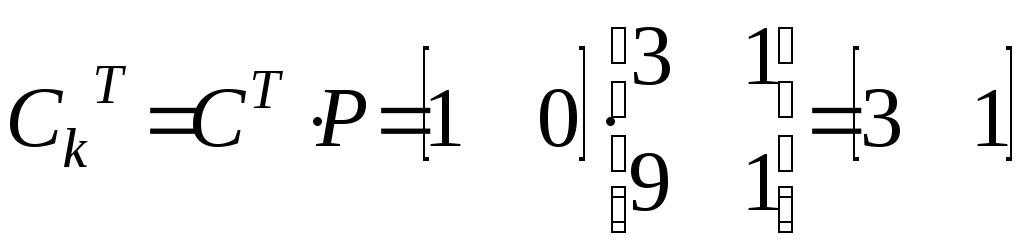 .
.
Математическая модель системы в канонической форме записи:
![]() ,
,
![]() ,
,
![]() .
.
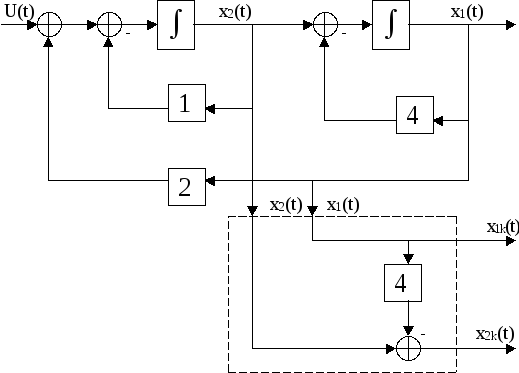
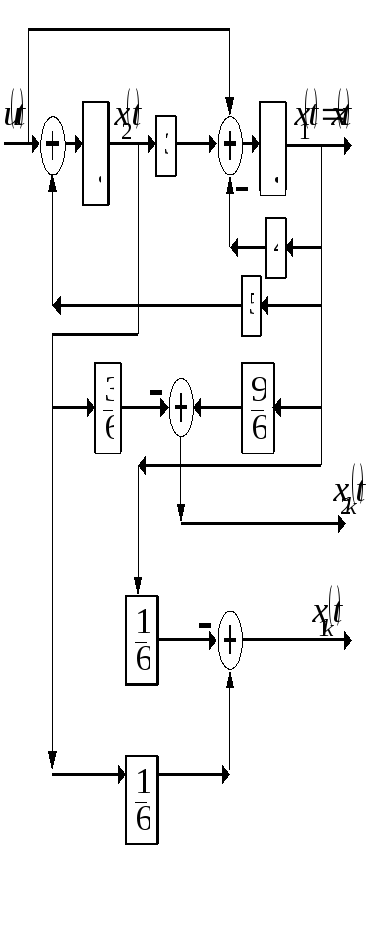
В соответствии с этими уравнениями структурная схема системы относительно канонических переменных состояния имеет вид
Канонические формы наблюдаемости.
Пусть математическая модель объекта управления задана системой уравнений:
 (1)
(1)
Будем говорить, что математическая модель объекта управления (1) записана в канонической форме наблюдаемости, если
Если объект управления (1) записан в канонической форме наблюдаемости, то сопряженная ему система записана в канонической форме управляемости.
СИНТЕЗ ЛИНЕЙНЫХ СИСТЕМ УПРАВЛЕНИЯ
по заданному расположению корней характеристического
уравнения замкнутой системы.
Пусть заданна передаточная функция замкнутой системы
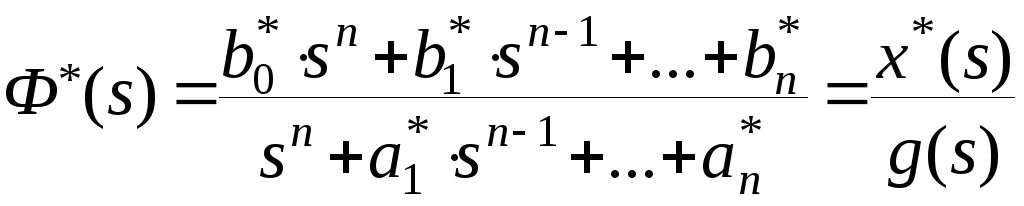 (1)
(1)
В
системе автоматического управления с
передаточной функцией
![]() процессы удовлетворяют всем заданным
требованиям, предъявленным к процессам
автоматического управления.
процессы удовлетворяют всем заданным
требованиям, предъявленным к процессам
автоматического управления.
Характеристическое уравнение замкнутой системы имеет вид
![]()
где
корни
![]() .
.
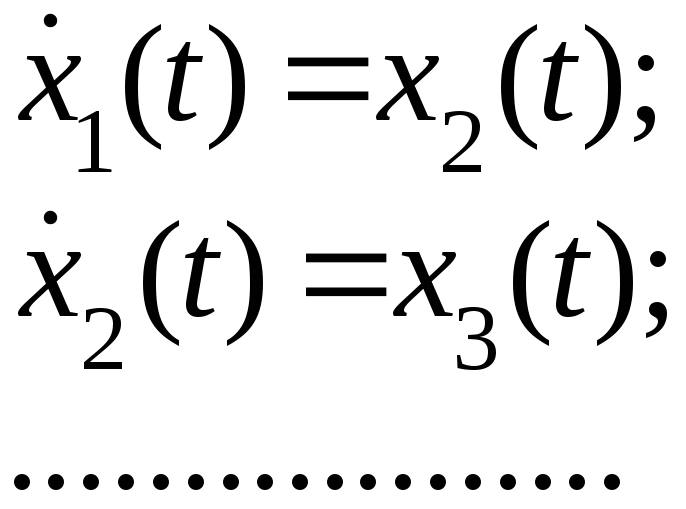
От
передаточной функции
![]() перейдём к математической модели
замкнутой системы в виде системы
дифференциальных уравнений, записанных
в нормальной форме Коши:
перейдём к математической модели
замкнутой системы в виде системы
дифференциальных уравнений, записанных
в нормальной форме Коши:
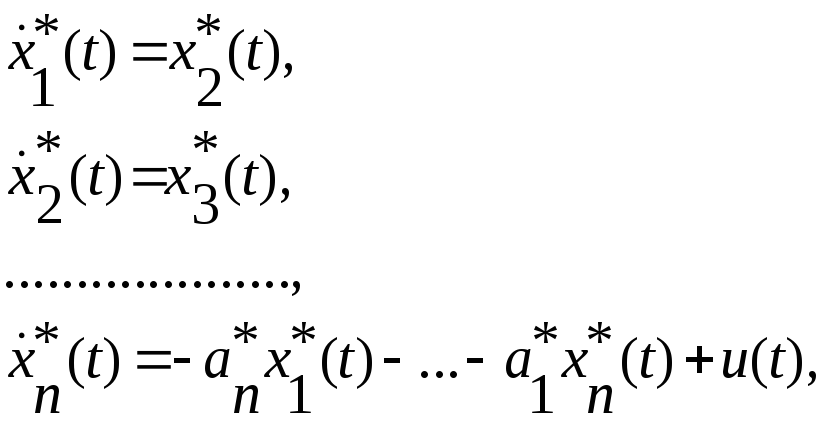 (2)
(2)
![]() (3)
(3)
Или в векторно-матричной форме записи
![]() ,
(4)
,
(4)
![]() .
(5)
.
(5)
Уравнения (2)-(3), а, следовательно, и (4),(5) имеют каноническую форму записи, каноническая форма управляемости.
Пусть далее математическая модель объекта управления задана в виде передаточной функции
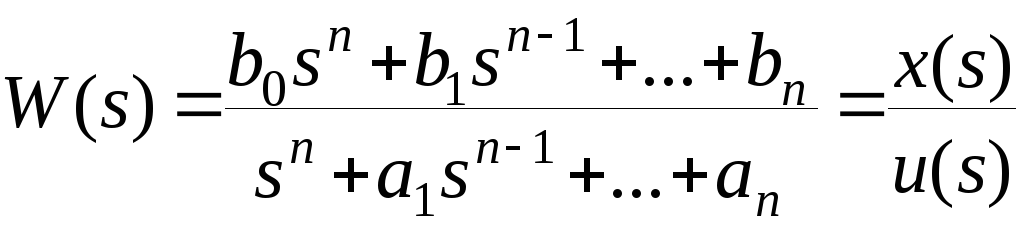 . (6)
. (6)
От
передаточной функции
![]() перейдём к математической модели объекта
управления относительно переменных
состояния, имеем
перейдём к математической модели объекта
управления относительно переменных
состояния, имеем
 (7)
(7)
 (8)
(8)