

Принцип дуальности управляемости и наблюдаемости.
Р.Каманом был установлен следующий принцип двойственности (принцип дуальности): пусть даны две системы, из которых одна описывается уравнениями
![]() ,
,
![]() ,
(*)
,
(*)
а другая уравнениями
![]() ,
,
![]() .
(**)
.
(**)
Такие системы называются двойственными или сопряженными друг к другу. Очевидно, что условие
![]()
является условием управляемости системы (*) и одновременно условием наблюдаемости системы (**), а равенство

условием наблюдаемости системы (*) и одновременно условием управляемости системы (**). Иными словами, система (*) управляема тогда и только тогда, когда наблюдаема сопряженная с ней система (**) и наоборот.
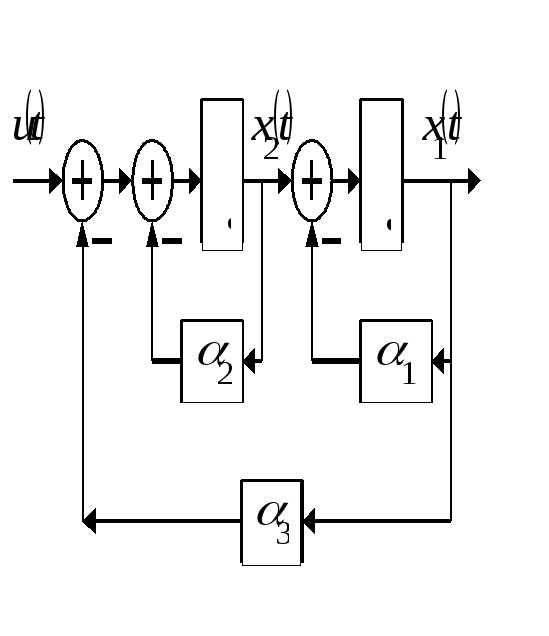
Пример. Структурная схема динамического объекта управления имеет вид
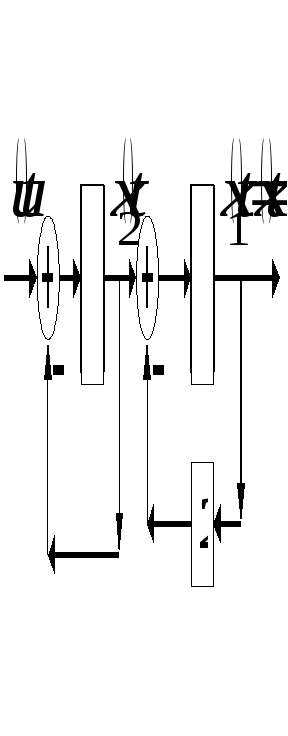
Исследовать наблюдаемость объекта управления.
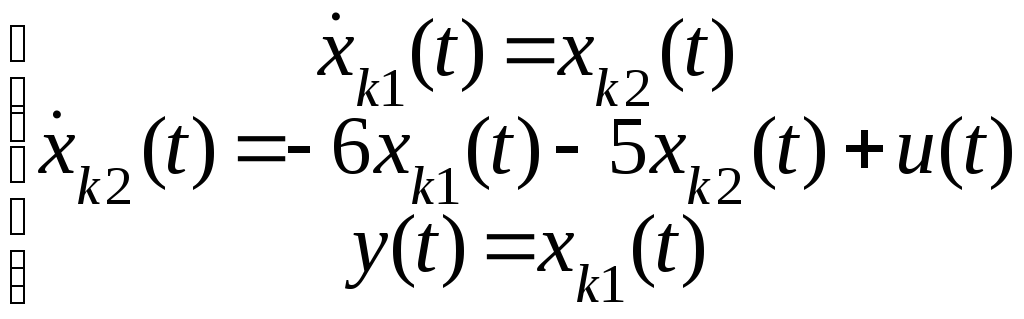
Решение. Дифференциальные уравнения, описывающие процессы в объекте управления в соответствии со структурной схемой будут
![]() ,
,
![]() ,
,
![]() .
.
Тогда:
 ,
,
 ,
, ,
, .
.
Составим матрицу наблюдаемости:
![]() ,
,
 ,
, ,
,
![]() .
.
Система наблюдаема.
КАНОНИЧЕСКАЯ ФОРМА УПРАВЛЯЕМОСТИ.
Пусть передаточная функция объекта управления имеет вид
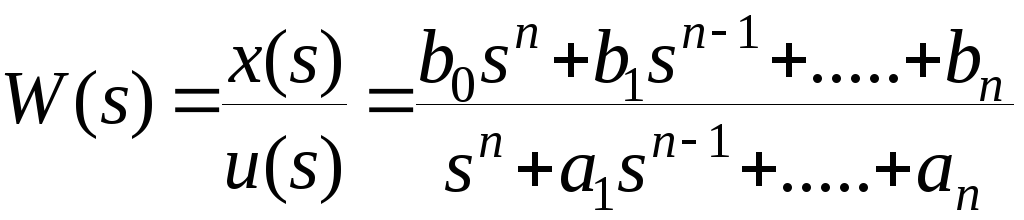
От
математической модели динамического
объекта в форме передаточной функции
![]() перейдем к его математической модели
в виде дифференциальных уравнений:
перейдем к его математической модели
в виде дифференциальных уравнений:
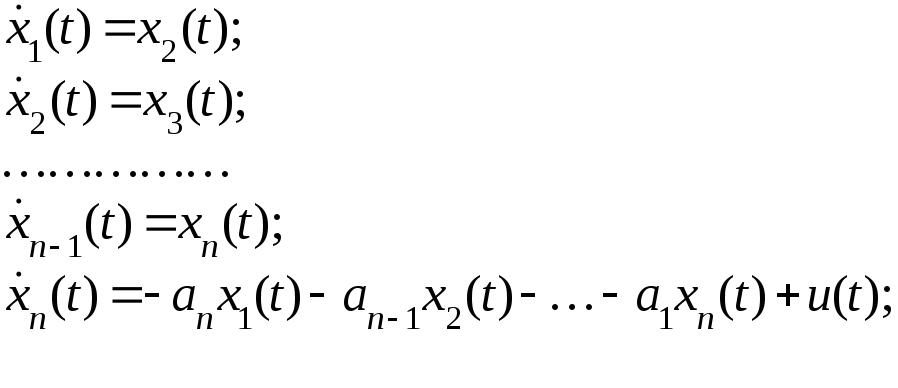 (1)
(1)
и уравнения выхода:
 .
(2)
.
(2)
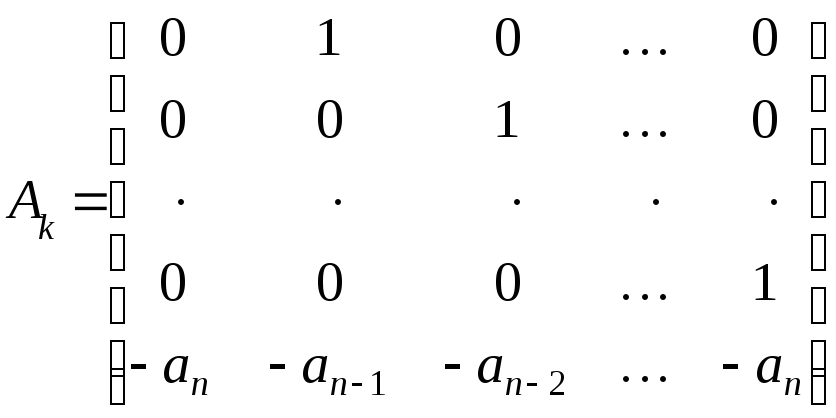
Такая форма записи математической модели динамического объекта управления называется канонической формой управляемости при этом:
 ,
,
 ,
,
 ,
,
![]() .
.
Замечание
1. Последняя
строка матрицы
![]() составлена из коэффициентов
характеристического уравнения
математической модели динамического
объекта управления.
составлена из коэффициентов
характеристического уравнения
математической модели динамического
объекта управления.
Замечание 2. Динамический объект управления, математическую модель которого можно привести к виду (1), (2), всегда обладает свойством управляемости. Это легко проверить непосредственным вычислением ранга матрицы управляемости
![]() .
(3)
.
(3)
Пусть задан динамический объект управления, математическая модель имеет вид
![]() ,
(4)
,
(4)
где
матрица
![]() динамики объекта управления и вектор
динамики объекта управления и вектор
![]() – произвольного вида.
– произвольного вида.
Если объект управления (4) обладает свойством управляемости, то его математическую модель можно преобразовать к канонической форме записи (1) и (2) с помощью невырожденного преобразования
![]() ,
(5)
,
(5)
где
матрица преобразования
![]() определяется с помощью равенства
определяется с помощью равенства
![]() ,
(6)
,
(6)
где
![]() – матрица управляемости для математической
модели объекта управления (4);
– матрица управляемости для математической
модели объекта управления (4);
![]() –
матрица управляемости вида (3).
–
матрица управляемости вида (3).
Было
доказано, что матрица
![]() определяется с помощью равенства
определяется с помощью равенства
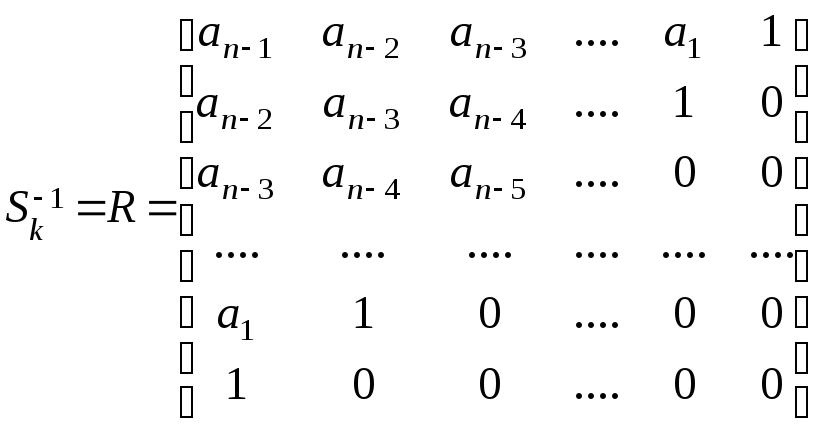 ,
(7)
,
(7)
где
![]() - коэффициенты характеристического
полинома матрицы динамики объекта
управления:
- коэффициенты характеристического
полинома матрицы динамики объекта
управления:
![]() .
(8)
.
(8)
Таким
образом, определив матрицу преобразования
![]() с помощью равенства
с помощью равенства
![]() (9)
(9)
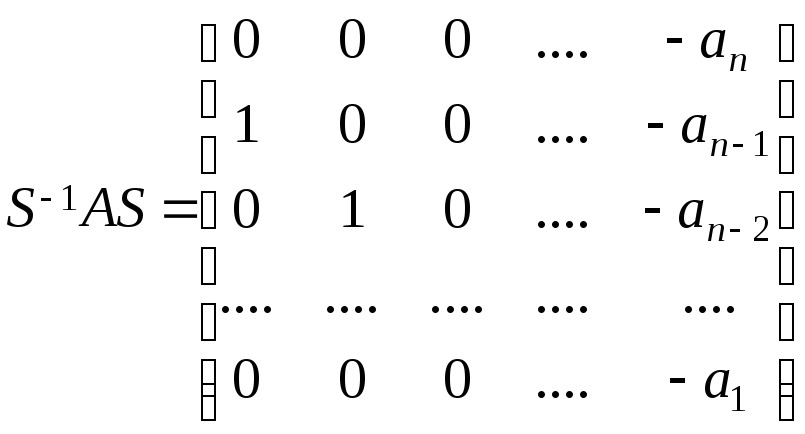
и учитывая, что
![]() (10)
(10)
получим
следующее соотношения, определяющие
![]() и
и![]() :
:
![]() ,
(11)
,
(11)
![]() .
(11.а)
.
(11.а)
Из
выше сказанного следует, что преобразование
математической модели объекта управления
(4) к канонической форме записи полностью
определяется матрицей динамики объекта
управления
![]() и вектора
и вектора
![]() .
.
Наиболее
трудоемкой операцией в алгоритме
преобразования (4) к канонической форме
записи – это получение коэффициентов
характеристического уравнения (8).
Известны различные способы вычисления
коэффициентов характеристического
полинома матрицы
![]() .
Однако в данном случае целесообразно
воспользоваться равенством
.
Однако в данном случае целесообразно
воспользоваться равенством
 ,
(12)
,
(12)
т.
е. произведение
![]() – образует матрицу, у которой элементы
последнего столбца – коэффициенты
характеристического полинома матрицы
– образует матрицу, у которой элементы
последнего столбца – коэффициенты
характеристического полинома матрицы
![]() ,
взятые с обратным знаком.
,
взятые с обратным знаком.
Алгоритм
преобразования математической модели
динамического объекта к канонической форме записи.
Исходные
данные:
Матрица динамики объекта управления
![]() ,
вектор
,
вектор
![]() .
.
<1> Составляется матрица управляемости объекта управления
![]()
<2>
Проверить выполнение критерия
управляемости
![]() .
.
<3> Вычислить коэффициенты характеристического полинома матрицы
![]() (с
помощью равенства (12)).
(с
помощью равенства (12)).
<4> Сформировать матрицу R.
<5>
Вычислить матрицу преобразования
![]() исходной математической модели (4) к
канонической форме записи (1), (2):
исходной математической модели (4) к
канонической форме записи (1), (2):
<6>
Вычислить
![]() ,
,
![]() ,
,
![]() .
.
Пример. (Преобразование к канонической форме управляемости с помощью < матриц управляемости >.) Дана система автоматического управления, структурная схема которой показана на рисунке
Привести
математическую модель системы к
канонической форме записи. Преобразование
выполнить при следующих значениях
параметров исходной системы
![]() ,
,
![]() ,
,
![]() .
.
Решение. Составим дифференциальное уравнение системы:
![]() ,
,
![]() ,
,
![]() .
.
 ;
;
 ;
;
 ;
;
![]() .
.
<1> Матрица управляемости:
![]() ,
,
 ,
,
 ,
,
![]() .
.
Исходная система управляема.
<2>
Характеристический полином матрицы
![]() :
:
 ;
;
![]() ;
;
![]() ;
;
<3>
![]()
 ;
;
 .
.
<4>
![]() .
.
<5>
 .
.
 .
.
<6>
Вычисление матриц
![]() и
и![]()

Проверка:
![]()
![]() ;
;
![]() .
.
![]() ;
;
![]()
 .
.

 ,
,