

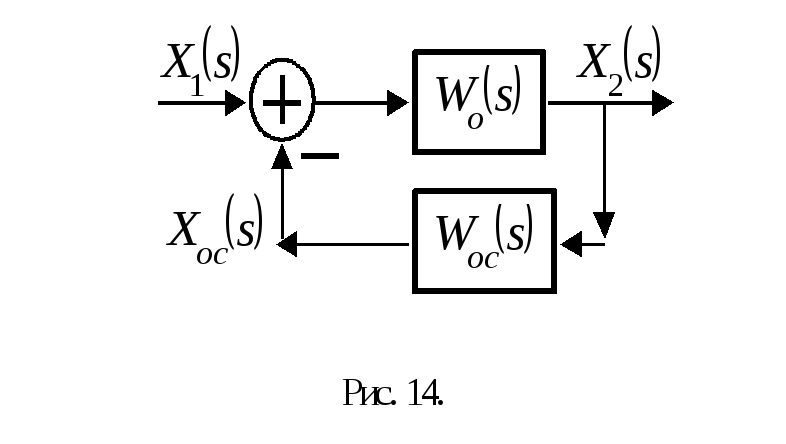
Гибкая обратная связь.
Пусть
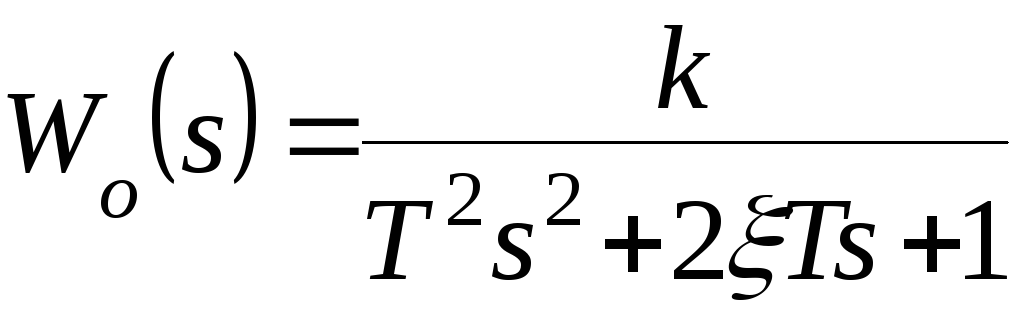
объект управления с передаточной
функцией
![]() охвачен отрицательной гибкой отрицательной
обратной связью с передаточной функцией
охвачен отрицательной гибкой отрицательной
обратной связью с передаточной функцией![]() .
Тогда структурная схема системы принимает
вид, показанный на рисунке 14.
.
Тогда структурная схема системы принимает
вид, показанный на рисунке 14.
Пусть теперь
 ,
,
![]() .
.
Тогда передаточная функция разомкнутой системы будет равна
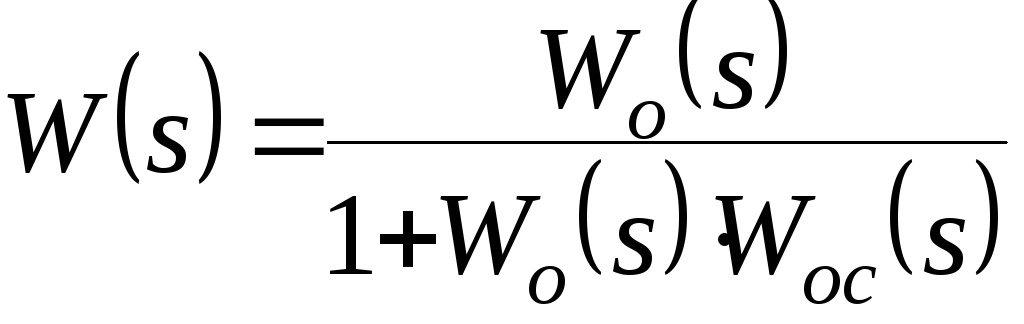 ,
,
 ,
,
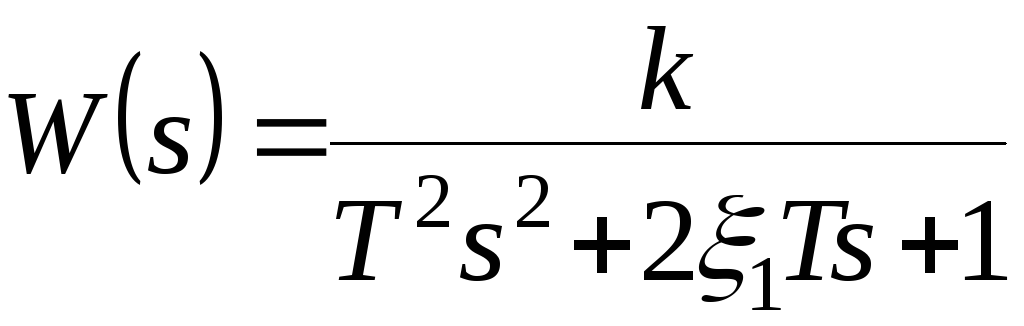
где
![]() ,
, .
.
Как
видно, в этом случае увеличивается
демпфирование колебательного звена
(![]() ),
при этом не меняется коэффициент
усиления. Процесс в системе становится
менее колебательным и может превратится
в апериодический, если будет выполняться
условие
),
при этом не меняется коэффициент
усиления. Процесс в системе становится
менее колебательным и может превратится
в апериодический, если будет выполняться
условие![]() .
.
Заметим, что охватывать апериодическое звено гибкой отрицательной обратной связью нет смысла, так как это увеличивает постоянную времени, увеличивает его инерциальность.
Если теперь передаточная функция объекта управления имеет вид
 ,
,
то аналогично предыдущему получаем
 ,
,
где
 ,
, .
.
Отсюда следует, что сохраняется тот же тип передаточной функции, но уменьшается инерционность системы.
Инерционная гибкая обратная связь.
Пусть
объект управления с передаточной
функцией
![]() охвачен отрицательной инерционной
гибкой отрицательной обратной связью
с передаточной функцией
охвачен отрицательной инерционной
гибкой отрицательной обратной связью
с передаточной функцией![]() .
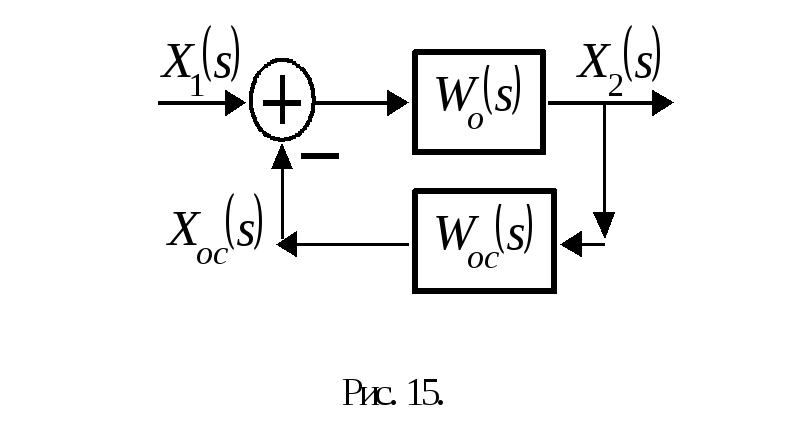
Тогда структурная схема системы принимает
вид, показанный на рисунке 15.
.
Тогда структурная схема системы принимает
вид, показанный на рисунке 15.
Пусть теперь
 ,
,
 .
.
Аналогично предыдущему получаем
 ,
,
где
 ,
, ,
, .
.
Здесь
при сохранении интегрирующего свойства
![]() получается эффект введения производной,
то есть интегрирующее звено становится
изодромным. Новые постоянные времени
получается эффект введения производной,
то есть интегрирующее звено становится
изодромным. Новые постоянные времени![]() и
и![]() ,
характеризующие инерционность разомкнутой
системы, могут быть сделаны малыми за
счет большого первичного коэффициента
усиления
,
характеризующие инерционность разомкнутой
системы, могут быть сделаны малыми за
счет большого первичного коэффициента
усиления![]() .
В последнем случае имеем
.
В последнем случае имеем
 .
.
Можно вообще заметить, что инерционное запаздывание в обратной связи целесообразно использовать для улучшения качества переходных процессов, получая эффект аналогичный введению производной в прямой цепи.
Корректирующие устройства по внешнему воздействию. Инвариантность.
Основной
принцип автоматического управления
состоит в формировании управляющего
воздействия по величине ошибки
![]() (с использованием интегралов и производных
от
(с использованием интегралов и производных
от![]() ).
Если же вводится корректирующие
устройство по внешнему воздействию, то
получаетсякомбинированное
управление
(по ошибке и по внешнему воздействию)
то же с использованием интегралов и
производных.
).
Если же вводится корректирующие
устройство по внешнему воздействию, то
получаетсякомбинированное
управление
(по ошибке и по внешнему воздействию)
то же с использованием интегралов и
производных.
Путем введения коррекции по внешнему воздействию удается при определенных условиях сводить величину установившейся ошибки к нулю при любой форме внешнего воздействия. Это свойство называется инвариантностью системы по отношению к внешнему воздействию.
Внешние воздействия делятся на задающее, сигнал которого система должна воспроизводить, и возмущающее, действие которого нужно нейтрализовать.
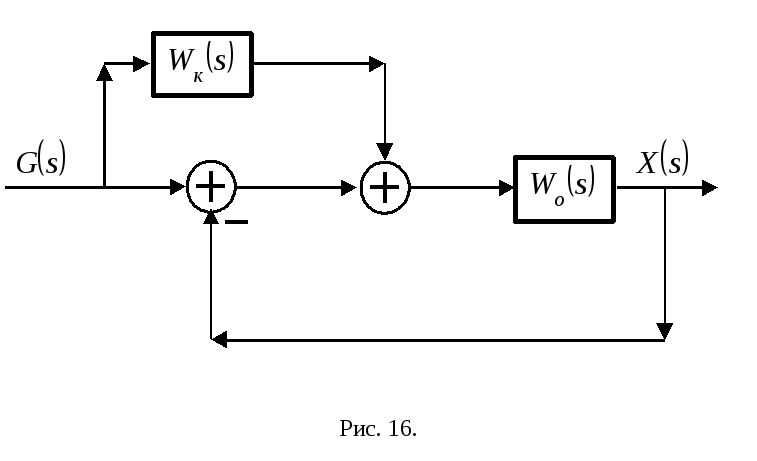
Корректирующее устройство по задающему воздействию.
Здесь
наряду с сигналом ошибки вводится во
внутреннюю цепь еще сигнал задающего
устройства
![]() через некоторую передаточную функцию
через некоторую передаточную функцию![]() .
В этом случае структурная схема системы
будет иметь вид, показанный на рисунке
16.
.
В этом случае структурная схема системы
будет иметь вид, показанный на рисунке
16.
Тогда
выходной сигнал
![]() в преобразовании по Лапласу выразится
в виде
в преобразовании по Лапласу выразится
в виде
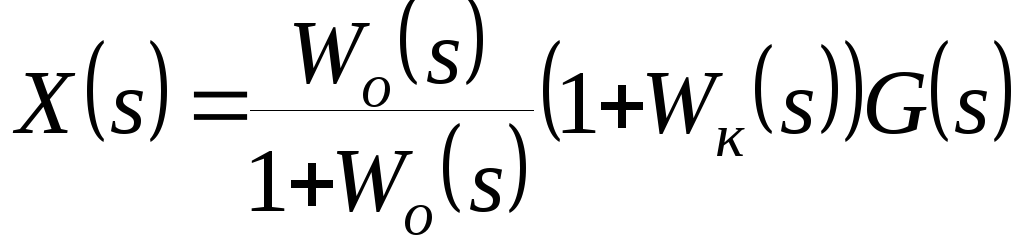 ,
,
то
есть эквивалентная передаточная функция
замкнутой системы по регулируемой
величине
![]() будет равна
будет равна
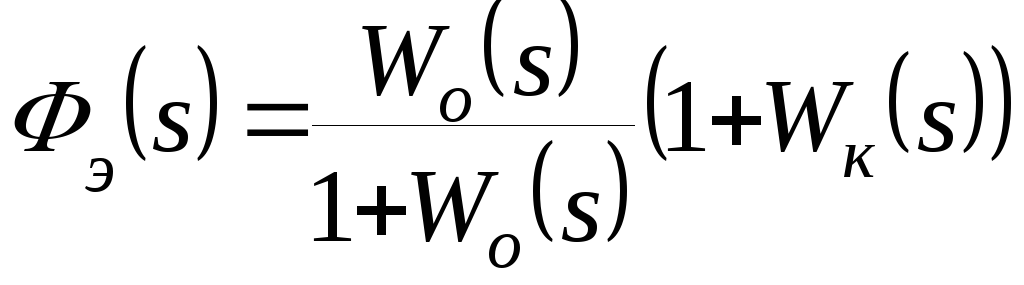 ,
,
а для ошибки
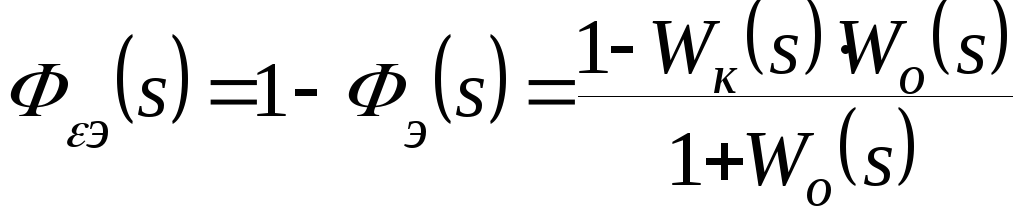 .
.
Значение установившийся ошибки будет равна нулю при любой форме задающего воздействия в том случае, если
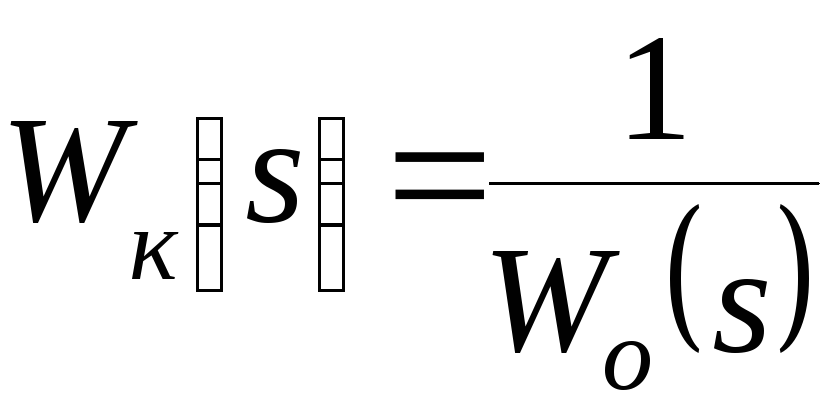 .
.
Обычно
это условие инвариантности удовлетворить
полностью нельзя, но можно подобрать
приближенное равенство для определенной
области частот (практически отрабатываемой
системой). Такая неполная инвариантность
весьма существенно уменьшает ошибку
![]() системы управления. Возможны и другие
варианты коррекции по заданному
воздействию.
системы управления. Возможны и другие
варианты коррекции по заданному
воздействию.