

8. Классификация систем управления
Классификация систем управления по структуре
Разомкнутая система управления по возмущающему воздействию
Д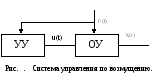 анная
система используется при известном
законе изменения во времени возмущающего
воздействия F (t). Зная модели объекта
управления по возмущающему воздействию
F (t) и по управляющему воздействиюu(t) можно для заданного закона
F (t) рассчитать значениеu(t),
чтобых(t)имело заданное
значение при измененииF(t).
Закон изменения управляющего воздействия
определяется и реализуется управляющим
устройством УУ.
анная
система используется при известном
законе изменения во времени возмущающего
воздействия F (t). Зная модели объекта
управления по возмущающему воздействию
F (t) и по управляющему воздействиюu(t) можно для заданного закона
F (t) рассчитать значениеu(t),
чтобых(t)имело заданное
значение при измененииF(t).
Закон изменения управляющего воздействия
определяется и реализуется управляющим
устройством УУ.
Достоинства системы управления по возмущению – отсутствие ошибки управления при точном знании моделей объекта управления и измерении возмущающего воздействия, простота реализации алгоритма.
Недостатками является необходимость датчиков для измерения всех возмущающих воздействий, объект должен быть достаточно точно описан математической моделью. В этом случае при измененииF(t) выходная переменная не изменяется, т.е она независима отF(t). Говорят, чтох (t)инвариантнокF (t).
Замкнутая система или система с ООС.
Системы с отрицательной обратной связью рассмотрены выше. При отклонении управляющего параметра от заданного значения УУ изменяет значение управляющего воздействия u(t), чтобы компенсировать влияние возмущений на объект управления.
Достоинства:система отрабатывает влияние всех возможных возмущений, действующих на объект, поэтому возмущенияf1 – f4обычно изображают в виде суммарного эквивалентного возмущенияf, приложенного к входной координате объекта.
Недостатки:
В принципе работы системы заложено наличие ошибки едля изменения значения управляющего воздействия (УВ), т.е. для изменения напряженияUдолжна быть ошибкае, но ошибкаеобычно делается меньше допустимого значения.
Система с ООС имеет ограничения по эффективности работы в частотной диапазоне. Она отрабатывает не все спектральные составляющие возмущающих воздействий. Для каждой системы есть область частот возмущений, влияние которых система не уменьшает, а увеличивает. Важно настроить систему так, чтобы в этой области не было возмущений или устранить их влияние другим способом.
Комбинированная система.
Пусть в системе с ОС имеется одно или несколько возмущений, имеющих большое влияние на выходную координату или находящихся в запретной зоне по частоте. Данные возмущения, вследствие их большого влияния, при управлении по отрицательной обратной связи могут давать большие ошибки управления. Для устранения (уменьшения) ошибки управления по данным переменным можно использовать управление по возмущению. Такая система управления называется комбинированной (рис. ). Она два канала управления: канал прямого управления УУF(канал компенсации возмущений) и канал управления по обратной связи УУос.

Канал прямого управления компенсирует влияние измеряемого возмущения F до какой-то величины . Система называется инвариантной до.
Канал ОС отрабатывает остальные, неизмеряемых возмущения, и остаточную ошибку влияния F. В данной системе используются положительные эффекты первых двух систем.
Классификация систем по назначению (задающему воздействию)
1. Системы стабилизации. Системами стабилизации называются системы автоматического регулирования, имеющие постоянное значение заданного значения q = qзад = const. Данные системы обеспечивают вывод регулируемого параметра на заданое значение и отработку возмущающих воздействийf,F, влияние которых без системы регулирования приводит к смещению регулируемого параметра от заданного значения.
2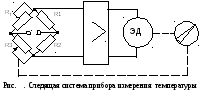 .
Следящие системы. Следящие системы
отрабатывают неизвестный заранее
закон изменения задающего воздействия.
На рис. приведена структурная схема
системы измерения температуры.
Термометр сопротивления Rтнаходится внутри ОУ. При изменении
температуры нарушается равновесие
моста Уитстона и на входе усилителя
появляется напряжение. Электрический
двигатель ЭД начинает вращаться и
изменять сопротивления R2 в
сторону восстановления равновесия
моста. Двигатель остановится в момент
восстановления равновесия моста. При
этом стрелка потенциометра отслеживает
значение температуры. Задающим
воздействием на систему является
значение сопротивления Rт, закон
изменения которого во времени заранее
неизвестен.
.
Следящие системы. Следящие системы
отрабатывают неизвестный заранее
закон изменения задающего воздействия.
На рис. приведена структурная схема
системы измерения температуры.
Термометр сопротивления Rтнаходится внутри ОУ. При изменении
температуры нарушается равновесие
моста Уитстона и на входе усилителя
появляется напряжение. Электрический
двигатель ЭД начинает вращаться и
изменять сопротивления R2 в
сторону восстановления равновесия
моста. Двигатель остановится в момент
восстановления равновесия моста. При
этом стрелка потенциометра отслеживает
значение температуры. Задающим
воздействием на систему является
значение сопротивления Rт, закон
изменения которого во времени заранее
неизвестен.
2 .
Система оптимального управления (рис.
). Система имеет два уровня управления.
Верхний уровень – система оптимального
программного управления (СОПУ) на
основании анализа характеристик сырья,
состояния технологического процесса
выбирает оптимальное текущее значение
режимного параметраg(t).
Система нижнего уровня – система
стабилизации с отрицательной обратной
связи служит для реализации на
технологическом процессе заданного
оптимального режима путем вывода
режимного параметраx(t)
на заданное значение и поддержания его
на заданном значении путем отработки
возмущающих воздействийf.
.
Система оптимального управления (рис.
). Система имеет два уровня управления.
Верхний уровень – система оптимального
программного управления (СОПУ) на
основании анализа характеристик сырья,
состояния технологического процесса
выбирает оптимальное текущее значение
режимного параметраg(t).
Система нижнего уровня – система
стабилизации с отрицательной обратной
связи служит для реализации на
технологическом процессе заданного
оптимального режима путем вывода
режимного параметраx(t)
на заданное значение и поддержания его
на заданном значении путем отработки
возмущающих воздействийf.