

4. Входы, выходы систем управления
5. Назначение систем управления
С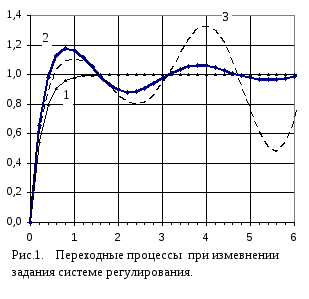 истемы
регулирования должны обеспечивать
стабильное нахождение регулируемой
величины с допустимой точностью на
заданном значении. При анализе систем
управления следует учитывать изменение
состояния системы при изменении двух
входных сигналов - задающегоg(t)
и возмущающего воздействийf(t).
Именно их изменения приводят к отклонению
регулируемых переменных от заданного
значения и появлению ошибки регулирования.
Рассмотрим влияние этих факторов.
истемы
регулирования должны обеспечивать
стабильное нахождение регулируемой
величины с допустимой точностью на
заданном значении. При анализе систем
управления следует учитывать изменение
состояния системы при изменении двух
входных сигналов - задающегоg(t)
и возмущающего воздействийf(t).
Именно их изменения приводят к отклонению
регулируемых переменных от заданного
значения и появлению ошибки регулирования.
Рассмотрим влияние этих факторов.
Пусть система регулирования находится в стационарном состоянии и значение выходной переменной равно заданном значению. При ступенчатом изменении значения задающего воздействия от 0 до 1 появляется ошибка, в результате которой управляющее устройство изменяет значение управляющего воздействия и регулируемая переменная выходит на новое заданное значение. На рис. 1 представлены три возможных графика выхода регулируемой переменной на новое значение. Здесь и далее анализ работы систем управления проводится в отклонениях выходной переменной от заданного значения (поэтому нахождение системы в стационарном состоянии, когда регулируемая переменная равна заданию обозначается линией на уровне 0).
График 1 – апериодический переходной процесс.
График 2 – колебательный затухающий переходной процесс.
График 3 – колебательный расходящийся переходной процесс, система управления неустойчивая, выходная переменная на выходит на заданное значение.
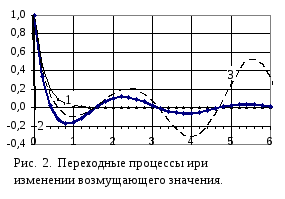
При появлении ступенчатого возмущающего воздействия появляется ступенчатая ошибка, которая в результате работы системы регулирования начинает уменьшаться. При этом также возможны три вида кривых переходных процессов, которые приведены на рисунке 2 - апериодический, колебательный затухающий и колебательный расходящийся. Расходящиеся колебательные процессы означают неспособность системы возвращаться в начальное состояние, что означает неустойчивость системы и, соответственно, ее неработоспособность.
 Система с переходными процессами
1,2 выполняет свою функцию и является
устойчивой.
Система с переходными процессами
1,2 выполняет свою функцию и является
устойчивой.
Система 3 после толчка за счет
возмущения система идет в разнос,
т.е. является неустойчивой.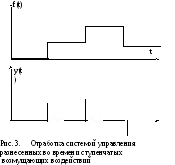
На рис. 3 приведены графики отработки системой управления ступенчатых возмущающих воздействий. В данном случае интервал между последующими возмущениями меньше времени переходного процесса. Можно достаточно четко проследить связь между переходным процессом и возмущением. Говорят, система работает с детерминированными (определенными с точки зрения знания закона их изменения) возмущениями.
Если количество возмущающих воздействий большое и интервал между возмущениями меньше времени окончания переходных процессов, то переходные процессы от разных возмущений накладываются друг на друга. Говорят, что система работает со случайными возмущениями. При действии таких возмущений анализируется суммарное влияние всех возмущений и суммарный эффект работы системы управления. Эффективность системы управления заключается в снижении дисперсии колебаний выходной переменной. На рисунке 4 показаны графики возможных колебаний выходной переменной при действии возмущающего воздействия без системы управления y*(y) и при работе системы управленияy(t). Система управления работает эффективно, т.к. дисперсия выходной переменной при работе системы уменьшается.