

33. Звено второго порядка. Математическая модель, характеристики.
34. Эквивалентные модели последовательного, параллельного, встречно-параллельного соединений элементов системы управления.
Элементы в системах управления могут соединяться в самых различных сочетаниях, но схему любой сложности можно рассматривать как совокупность трех типов соединений: последовательное, параллельное и соединение с обратной связью.
1. При последовательном соединенииэлементов общая передаточная функция равна произведению передаточных функций элементов.

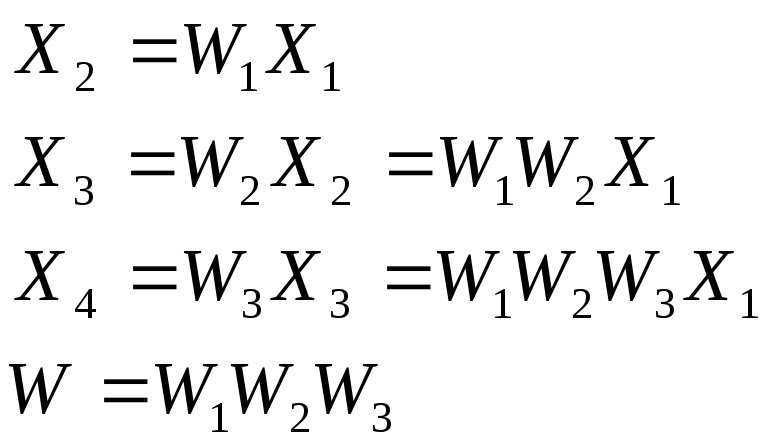
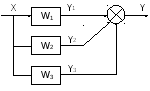
2. При параллельном соединенииэлементов общая передаточная функция равна сумме передаточных функций элементов

2. Получим выражения для передаточной функции элемента, охваченного обратной связью (встречно-параллельное соединение элементов) .

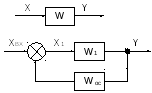
При отрицательной обратной связи
![]()
При положительной обратной связи
![]()
Преобразование структурных схем систем управления.

18. Виды передаточных функций системы управления, их определение по передаточным функциям элементов системы.
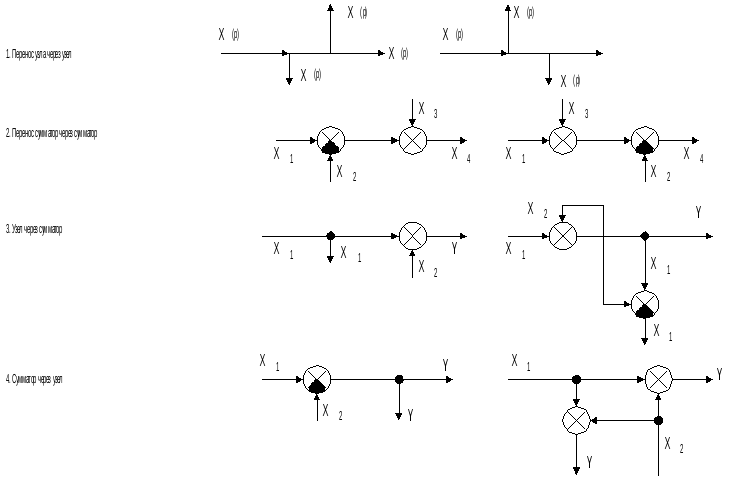
На основании данный правил преобразования структурная схема любой сложности может быть приведена к типовой структурной схеме.

![]() –передаточная функция разомкнутой
системы.
–передаточная функция разомкнутой
системы.
![]()
![]()
![]()
![]()
![]() –передаточная функция замкнутой
системы по задающему
–передаточная функция замкнутой
системы по задающему
воздействию(по каналу задающее воздействие-регулируемая переменная).
![]() –передаточная функция замкнутой
системы по возмущению
–передаточная функция замкнутой
системы по возмущению
(по каналу возмущающее воздействие – регулируемая переменная).
Ошибка управления![]()
![]()
![]()
![]()
![]()
W(p) – передаточная функция задающего воздействия на ошибку.
W(p) – передаточная функция возмущающего воздействия на ошибку.
Рассмотрим структурную схему, более общего вида для возмущений, приложенных в нескольких точках.

У стойчивость
системы управления.На рис. представлены
три возможных графика переходных
процессов регулируемой переменной по
задающему воздействию. Здесь (и часто
далее) анализ работы систем управления
проводится в отклонениях выходной
переменной от заданного значения
(поэтому нахождение системы в стационарном
состоянии, когда регулируемая переменная
равна заданию обозначается линией на
уровне 0).
стойчивость
системы управления.На рис. представлены
три возможных графика переходных
процессов регулируемой переменной по
задающему воздействию. Здесь (и часто
далее) анализ работы систем управления
проводится в отклонениях выходной
переменной от заданного значения
(поэтому нахождение системы в стационарном
состоянии, когда регулируемая переменная
равна заданию обозначается линией на
уровне 0).
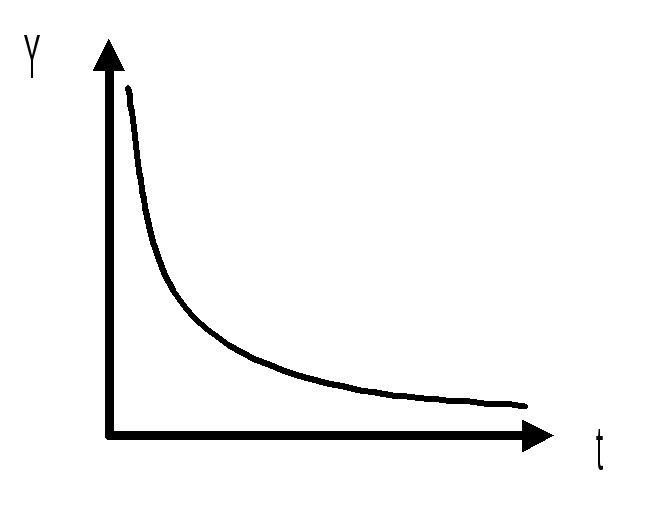
График 1 – апериодический переходной процесс в заданное состояние.
График 2 – колебательный затухающий переходной процесс в заданное состояние.
График 3 – колебательный расходящийся переходной процесс вокруг заданного значения.
В первых двух случаях система управления переходит в заданное значение. Говорят система является устойчивой. В третьем случае выходная переменная совершает расходящийся колебательный процесс – система является неустойчивой.
При разработке системы обеспечение ее устойчивости является важным условием работоспособности системы. Это означает обеспечение перехода системы в заданную точку по задающему воздействию и перехода системы в нулевое положение при действии возмущающего воздействия и после прекращения его действия.
П роизведение
передаточных функций всех элементов
контура системы является передаточной
функцией разомкнутой системы. На элемент
сравнения регулируемая переменная
подается со знаком минус, что означает
сдвиг по фазе на 1800. Каждый элемент
системы имеет свою частотную характеристику
и дает свой фазовый сдвиг. Фазовый сдвиг
всех элементов системы может быть более
1800, и при этом отрицательная
обратная связь может превратиться в
положительную. При этом система может
стать неустойчивой. В общем случае
суммарное отставание по фазе всех
элементов обычно более 1800и
необходимо в этих условиях обеспечить
устойчивость и работоспособность
системы.
роизведение
передаточных функций всех элементов
контура системы является передаточной
функцией разомкнутой системы. На элемент
сравнения регулируемая переменная
подается со знаком минус, что означает
сдвиг по фазе на 1800. Каждый элемент
системы имеет свою частотную характеристику
и дает свой фазовый сдвиг. Фазовый сдвиг
всех элементов системы может быть более
1800, и при этом отрицательная
обратная связь может превратиться в
положительную. При этом система может
стать неустойчивой. В общем случае
суммарное отставание по фазе всех
элементов обычно более 1800и
необходимо в этих условиях обеспечить
устойчивость и работоспособность
системы.
Система с отрицательной обратной связью является устойчивой:
- если общий сдвиг по фазе всех элементов разомкнутой системы не превышает -1800, тогда отрицательная обратная связь не превращается в положительную.
- общий сдвиг элементов системы по фазе может быть более -1800 , но тогда модуль частотной характеристики должен быть не более 1.
Эти два условия выражаются критерием
Найквиста, согласно которому АФЧХ
разомкнутой системы при изменении
частоты
![]() до
до![]() не должна охватывать точку С(-1,j0).
Это означает, что при отставании по фазе
более -1800 коэффициент системы
не должен быть более 1.
не должна охватывать точку С(-1,j0).
Это означает, что при отставании по фазе
более -1800 коэффициент системы
не должен быть более 1.
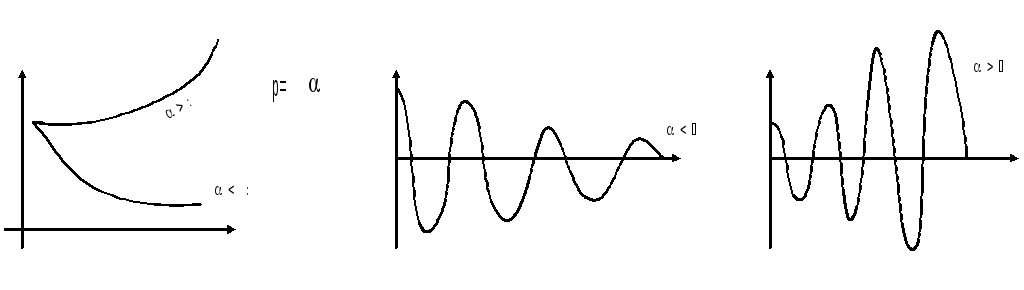
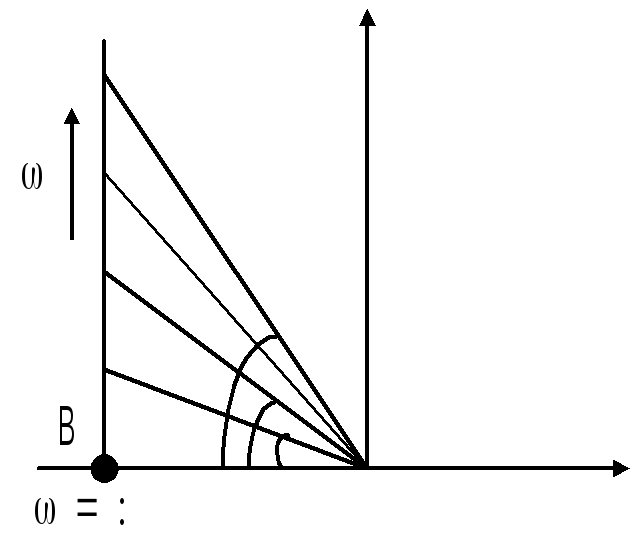
На рис. приведены три амплитудные фазовые частотные характеристики разомкнутой системы третьего порядка. Системы управления с АЧФЧ 1, 2 является устойчивыми, т.к. не охватывают точку С(-1,j0). Система управления с АФЧХ 4 охватывает точку С(-1,j0) и отрицательная обратная связь превращается в положительную с коэффициентом по замкнутому контуру системы более 1. Данная система является неустойчивой.
Устойчивость систем автоматического регулирования.
Понятие устойчивости связано со способностью системы возвращаться в исходное состояние после прекращения действия возмущения. Возможны три случая:
Система возвращается в исходное состояние, т.е. система устойчивая.
Характеризуется незатухающими колебаниями, система находится на границе устойчивости.
Колебания расходящиеся – система неустойчивая.
Система является устойчивой, если отклонение регулируемой величины по истечении достаточно большого времени становится меньше некоторого заранее заданного числа.
![]()
![]()
![]()
Распишем полиномы
![]() .
.
![]()
Данное дифференциальное уравнение описывает действие системы при отсутствии возмущающих воздействий. При наличии возмущающих воздействий изменяется только правая часть данного уравнения. Характер переходного процесса определяется только левой частью данного уравнения, т.е. свободная составляющая определяется корнями левой частью.
Запишем характеристическое уравнение
![]()
Из рассмотренных выше решений дифференциальных уравнений:
а) если корни вещественные и отрицательные, то свободная составляющая
![]() ,
,
а переходной процесс будет определяться суммой ниспадающих экспонент.
б) для пары сопряженных комплексных корней с отрицательной вещественной частью составляющие свободного движения также убывают до 0приt . Переходной процесс имеет вид затухающей синусоиды
![]()
в) чисто мнимые корни; свободная
составляющая (их компоненты) в виде
незатухающих колебаний.
![]()
![]()
Таким образом, система устойчивая, если вещественные корни отрицательные, а мнимые – имеют отрицательную вещественную часть. При наличии чисто мнимых корней система находится на границе устойчивости. А при положительных вещественных корнях и положительных вещественных составляющих мнимых корней система является неустойчивой.
Обычно реальная система является нелинейной и при анализе динамики ее уравнения линеаризируются. Ляпунов(русский математик) доказал три теоремы:
Если корни характеристического уравнения имеют отрицательные вещественные части, то реальная система устойчивая и никакие отброшенные части второго и третьего порядка не изменяют устойчивость системы.
Если хотя бы один корень имеет положительную вещественную часть, то система неустойчивая и никакие отброшенные части не смогут придать системе устойчивость.
Если характеристическое уравнение имеет нулевой или чисто мнимые корни, то поведение реальной системы, отброшенные части могут изменить устойчивость.
Рассмотрим корни характеристического уравнения на комплексной плоскости.

p1 p2p3
12 3
![]()
![]()
Для устойчивости линейной системы
необходимо и достаточно, чтобы все
корни лежали в левой полуплоскости.
Нулевой корень
![]() и чисто мнимый корень лежат на мнимой
оси, система находится на границе
устойчивости. Если корни лежат в
правой полуплоскости, то система
неустойчивая.
и чисто мнимый корень лежат на мнимой
оси, система находится на границе
устойчивости. Если корни лежат в
правой полуплоскости, то система
неустойчивая.
Не всегда удобно вычислять корни характеристического уравнения особенно большого порядка, поэтому разработаны критерии, позволяющие исследовать устойчивость системы без вычисления корней характеристического уравнения:
1. Необходимым, но недостаточным
критерием устойчивости является
положительность всех коэффициентов
характеристического уравнения. На
основании основной теоремы алгебры
характеристическое уравнение можно
писать![]()
Если все
![]() ,
то
,
то![]()
![]()
Все коэффициенты будут больше нуля.
Аналогично для комплексных корней.
2. Критерий Раус: в виде таблицы для характеристического уравнения замкнутой системы
1.![]()
![]()
![]()
![]()
2.![]()
![]()
![]()
![]()
3.![]()
![]()
![]()
4.![]()
![]()
![]()
![]()
Строка 1– включает четные коэффициенты характеристического уравнения;
Строка 2– нечетные коэффициенты.
Следующие строки (до n ) заполняются на основании указанного алгоритма, на основании вышележащих строк. Если все коэффициенты первого столбца, то системаустойчивая. Если хотя бы один коэффициент первого столбца, то системанеустойчивая; при этом число переменных знаков первого столбца указывает количество корней с положительной вещественной частью.
Недостаток критерия: большой объем вычислений при большом порядке уравнений.
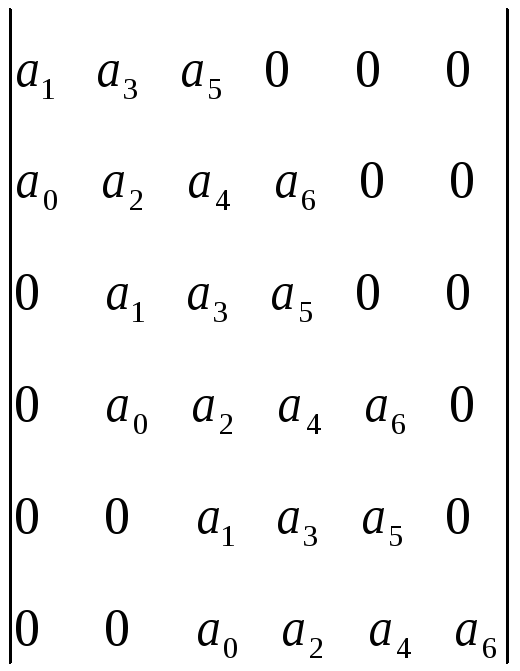
3. Критерий Гурвица:
составляется квадратная матрица
(nn).
Всеn– определителей
малых матриц от (11)
до (nn)
должны быть больше нуля, при![]()
![]()
Мы рассмотрели алгебраические критерии устойчивости. Они сложны приn>4. Кроме того, в случае неустойчивой системы они не дают ответа, какие параметры в какую сторону изменять, чтобы сделать систему устойчивой.
Критерий Михайлова и Найквиста: в их основе лежит принцип аргумента.Принцип аргумента:
![]()
![]()
![]()
Построим характеристический вектор.
![]() .
Суммарный угол поворота вектора D
равен сумме углов поворота отдельных
сомножителей
.
Суммарный угол поворота вектора D
равен сумме углов поворота отдельных
сомножителей![]() Возможные варианты сомножителей:
Возможные варианты сомножителей:
 ,
, Сомножитель
Сомножитель .
.
Построим годограф этого вектора при изменении частоты (0)до бесконечности
![]()
![]()

2.
![]() Сомножитель
Сомножитель![]()
![]() ,
,![]() Мы рассматриваем приращение угла,
которое дает данный сомножитель к
произведениюD(j)(он дает
).
Мы рассматриваем приращение угла,
которое дает данный сомножитель к
произведениюD(j)(он дает
).
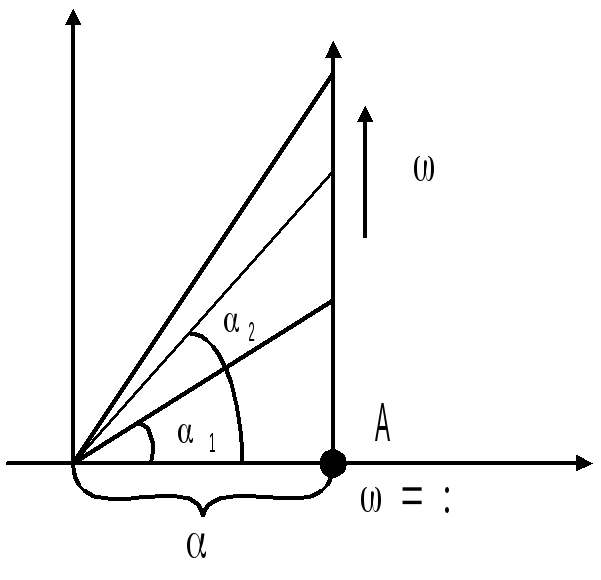
3 .
Комплексно-сопряженные корни с
отрицательной вещественной частью.
При, векторы А1и А2. По аналогии при измененииА1 и А2идут вертикально вверх,
.
Комплексно-сопряженные корни с
отрицательной вещественной частью.
При, векторы А1и А2. По аналогии при измененииА1 и А2идут вертикально вверх,![]() ,
,![]() ,
,![]()
Таким образом, пара комплексных корней дает поворот годографа D(j)на угол в положительную сторону.
4.
![]()
![]()
А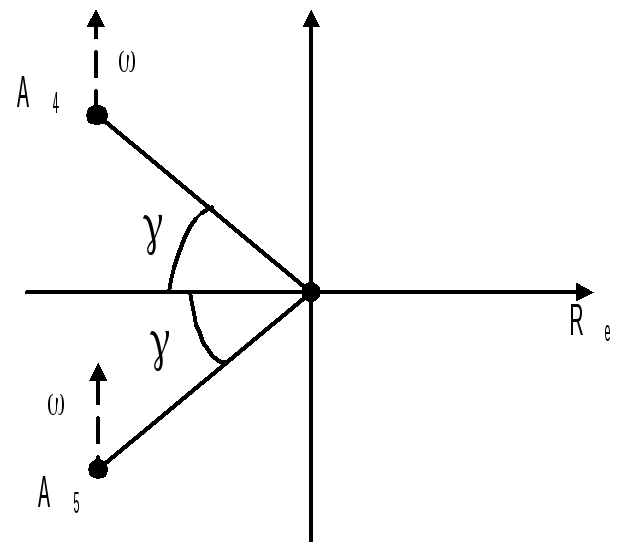 4,
А5– исходные точки годографов
– при увеличение,
пойдут вертикально вверх. При
4,
А5– исходные точки годографов
– при увеличение,
пойдут вертикально вверх. При![]()
![]()
![]()
Всего имеется n– корней. Пусть
![]() корней имеют положительную вещественную
часть (вещественные или комплексные
корни). Для
корней имеют положительную вещественную
часть (вещественные или комплексные
корни). Для![]() корней угол поворота
корней угол поворота![]() ,
для остальных корней
,
для остальных корней![]() .
Полный угол поворота годографа
.
Полный угол поворота годографа![]() .
При
.
При
![]()
![]()
Таким образом, система устойчивая,
если приращение угла годографа (фазы)
при изменении от0доравно![]() .
Если приращение меньше, то система
неустойчивая.
.
Если приращение меньше, то система
неустойчивая.
Критерий Михайлова:
для устойчивости системы необходимо
и достаточно, чтобы годограф Михайлова
D(j)приимел угол поворота![]() .
Оказывается, годограф всегда имеет
плавную спиралеобразную форму, причем
ее конец уходит в бесконечность в
том квадранте, номер которого равен
степени характеристического полинома.
Число квадрантов> nгодограф пройти не может.
.
Оказывается, годограф всегда имеет
плавную спиралеобразную форму, причем
ее конец уходит в бесконечность в
том квадранте, номер которого равен
степени характеристического полинома.
Число квадрантов> nгодограф пройти не может.
Метод:записывается![]() ,
подставляется
,
подставляется![]() ;
разбивается на мнимую и вещественную
части:
;
разбивается на мнимую и вещественную
части:![]()
Строится график
![]()
Показатели качества переходных процессов. Точность установившегося режима.
При анализе работы элементов системы управления следует различать два режима работы – стационарный (статический) и нестационарный (переходной).
С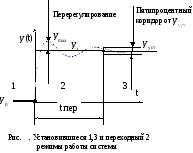 тационарный
режим – это установившийся режим, когда
все переменные системы находятся в
установившихся состояниях. На рис.
приведен график изменения значения
выходной переменной при изменении
задания от начального значенияy0
до нового заданного
значенияy1. Переход
выходной переменной из состоянияy0
в новое состояниеy1
произошел за время переходного
процессаtпер. Интервалы
1 и 3 на графике соответствуют установившимся
состояниям системы, интервал 2 - переходному
процессу. Переходный процесс и
установившееся после него состояние
отличаются от заданных значений
регулируемой переменной. Эти отклонения
характеризуются следующими показателями
качества работы системы управления.
тационарный
режим – это установившийся режим, когда
все переменные системы находятся в
установившихся состояниях. На рис.
приведен график изменения значения
выходной переменной при изменении
задания от начального значенияy0
до нового заданного
значенияy1. Переход
выходной переменной из состоянияy0
в новое состояниеy1
произошел за время переходного
процессаtпер. Интервалы
1 и 3 на графике соответствуют установившимся
состояниям системы, интервал 2 - переходному
процессу. Переходный процесс и
установившееся после него состояние
отличаются от заданных значений
регулируемой переменной. Эти отклонения
характеризуются следующими показателями
качества работы системы управления.
Динамические показатели при ступенчатом воздействии.
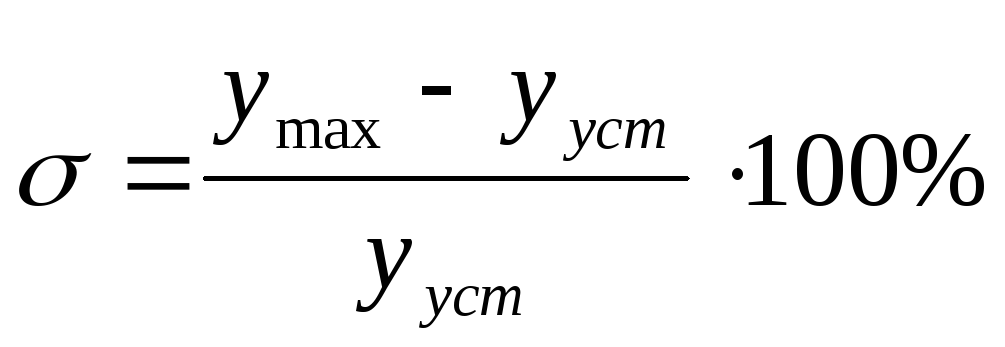
Перерегулирование– выраженное в процентах превышение регулируемой переменно нового установившегося уровня во время переходного процесса
 .
Допустимые значения
.
Допустимые значения
Время регулирования
 – время переходного процесса от времени
изменения задающего воздействия (или
действия возмущения) до вхождения
регулируемой переменной в 5% коридор
от установившегося значения
– время переходного процесса от времени
изменения задающего воздействия (или
действия возмущения) до вхождения
регулируемой переменной в 5% коридор
от установившегося значения .
.Допустимое число колебанийрегулируемой переменной за время переходного процесса. допускается до 4 колебаний, оптимальное значение
 колебания.
колебания.
Статические показатели– установившаяся
ошибка (точность установившегося режима)
– отклонение установившегося значения
выходной переменной от заданного
значения![]()
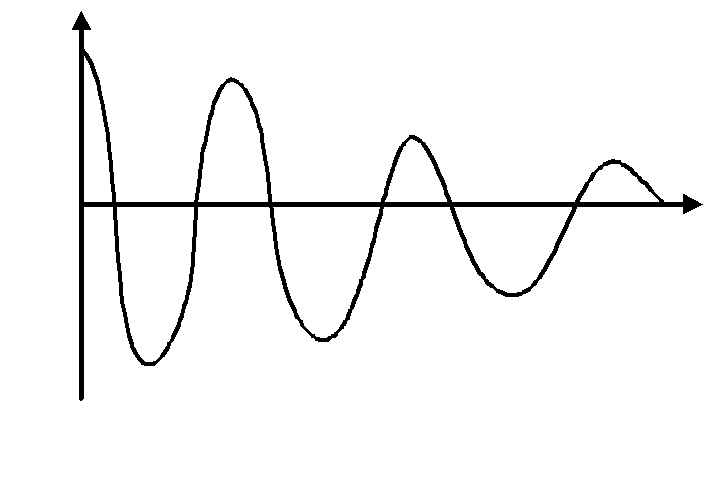
Показатели качества работы системы при случайных воздействиях.
М ногие
системы постоянно находятся под действием
большого количества возмущающих
воздействий. При этом нельзя выделить
установившиеся и переходные режимы.
Система практически постоянно находится
в переходном режиме (можно сказать во
множестве переходных режимов от множества
возмущающих воздействий). При этом
выходная переменная постоянно колеблется
вокруг заданного значения (см. рис. ).
Система работает эффективно, если при
работе системы ширина коридора колебания
выходной переменной (
ногие
системы постоянно находятся под действием
большого количества возмущающих
воздействий. При этом нельзя выделить
установившиеся и переходные режимы.
Система практически постоянно находится
в переходном режиме (можно сказать во
множестве переходных режимов от множества
возмущающих воздействий). При этом
выходная переменная постоянно колеблется
вокруг заданного значения (см. рис. ).
Система работает эффективно, если при
работе системы ширина коридора колебания
выходной переменной (![]() на рис. ) уменьшается по отношению к
ширине коридора колебания выходной
переменной при неработающей системе
(
на рис. ) уменьшается по отношению к
ширине коридора колебания выходной
переменной при неработающей системе
(![]() на рис. ).
на рис. ).
Количественной оценкой качества работы системы является коэффициент эффективности, который равен отношению дисперсии выходной переменной при работающей системе к дисперсии выходной переменной при неработающей системе
 . Дисперсия характеризует ширину
коридора колебания случайной величины
и определяется по выражению
. Дисперсия характеризует ширину
коридора колебания случайной величины
и определяется по выражению
 .
.