

Линеаризация уравнений динамики САУ
Линеаризация-замена реальных нелинейных уравнений статических характеристик элементов близкими к ним линейными уравнениями. Линеаризация возможна, если нелинейная характеристика непрерывна и имеет непрерывные частные производные. На рис.2.1. приведена геометрическая интерпретация линеаризации по методу малых отклонений.
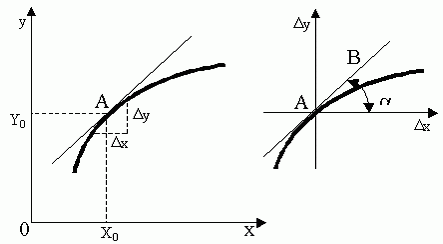 Рис.2.1.
Геометрическая интерпретация линеаризации
Рис.2.1.
Геометрическая интерпретация линеаризации
Разложив функцию y=f(x) в ряд Тейлора, получим
где y0- значение выхода, соответствующее входу x0; dky/dxk - значения производных, взятых в точке А(x0;y0). Тогда для малых отклонений x:
![]() или
или
![]()
где
![]() при
x=x0.
при
x=x0.
Если выходная величина элемента зависит от нескольких входных воздействий, то при линеаризации по методу малых приращений следует определять частные производные по всем воздействиям, а приращение выхода является суммой частных приращений, т.е.
 где
x1,
x2,
…, xn
- приращения входных воздействий;
где
x1,
x2,
…, xn
- приращения входных воздействий;
 -
частные производные.
-
частные производные.
3.2. Линеаризация уравнения динамики
В общем случае уравнение динамики оказывается нелинейным, так как реальные звенья САУ обычно нелинейны. В целях упрощения теории нелинейные уравнения заменяют линейными, которые приблизительно описывают динамические процессы в САУ. Получаемая при этом точность уравнений оказывается достаточной для технических задач. Процесс преобразования нелинейных уравнений в линейные называется линеаризацией уравнений динамики. Рассмотрим сначала геометрическое обоснование линеаризации.
В
нормально функционирующей САУ значение
регулируемой и всех промежуточных
величин незначительно отличается от
требуемых. В пределах малых отклонений
все нелинейные зависимости между
величинами, входящими уравнение динамики,
могут быть приближенно представлены
отрезками прямых линий. Например,
нелинейная статическая характеристика
звена на участке АВ (рис.26) может быть
представлена отрезком касательной в
точке номинального режима А"В".
Начало координат переносится в точку
О’, и в уравнениях записываются не
абсолютные значения величин y,u,f,
а их отклонения от номинальных значений:
![]() y
= y - yн,
y
= y - yн,
![]() u
= u - uн,
u
= u - uн,
![]() f
= f - fн.
Это позволяет получить нулевые
начальные условия,
если считать, что при t
f
= f - fн.
Это позволяет получить нулевые
начальные условия,
если считать, что при t
![]() 0
система находилась в номинальном режиме
в состоянии покоя.
0
система находилась в номинальном режиме
в состоянии покоя.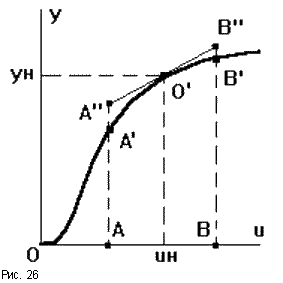
Математическое
обоснование линеаризации состоит в
том, что если известно значение f(a)
какой - либо функции f(x)
в любой точке x
= a,
а также значения производных от этой
функции в данной точке
f’(a), f”(a), ..., f(n)(a),
то в любой другой достаточно близкой
точке x
+
![]() x
значение функции можно определить,
разложив ее в окрестности точки a в ряд
Тейлора:
x
значение функции можно определить,
разложив ее в окрестности точки a в ряд
Тейлора:

Аналогично
можно разложить и функцию нескольких
переменных. Для простоты возьмем
упрощенный, но наиболее характерный
вариант уравнения динамики САУ:
F(y,y',y",u,u')
= f.
Здесь производные по времени u',y',y"
также являются переменными. В точке,
близкой к номинальному режиму: f
= fн
+
![]() fи
F
= Fн
+
fи
F
= Fн
+
![]() F.
Разложим функцию F
в ряд Тейлора в окрестности точки
номинального режима, отбрасывая члены
ряда высоких порядков малости:
F.
Разложим функцию F
в ряд Тейлора в окрестности точки
номинального режима, отбрасывая члены
ряда высоких порядков малости:
 .
.
В номинальном режиме, когда все отклонения и их производные по времени равны нулю, получаем частное решение уравнения: Fн = fн. Учитывая это и вводя обозначения получим:
ao![]() y”
+ a1
y”
+ a1![]() y’
+ a2
y’
+ a2![]() y
= bo
y
= bo![]() u’
+ b1
u’
+ b1![]() u
+ co
u
+ co![]() f.
f.
Отбрасывая
все знаки
![]() ,
получим:
,
получим:
aoy” + a1y’ + a2y = bou’ + b1u + cof.
Отбрасывая
все знаки
![]() ,
получим:
,
получим:
В более общем случае:
aoy(n) + a1y(n-1) + ... + an - 1y’ + any = bou(m) + ... + bm - 1u’ + bmu + cof.
При этом всегда нужно помнить, что в данном уравнении используются не абсолютные значения величин y, u, f их производных по времени, а отклонения этих величин от номинальных значений. Поэтому полученное уравнение будем называть уравнением в отклонениях.
К линеаризованной САУ можно применить принцип суперпозиции: реакция системы на несколько одновременно действующих входных воздействий равна сумме реакций на каждое воздействие в отдельности. Это позволяет звено с двумя входами u и f разложить на два звена, каждое из которых имеет один вход и один выход (рис.27). Поэтому в дальнейшем мы ограничимся изучением поведения систем и звеньев с одним входом, уравнение динамики которых имеет вид:
aoy(n) + a1y(n-1) + ... + an - 1y’ + any = bou(m) + ... + bm - 1u’ + bmu.
Это
уравнение описывает САУ в динамическом
режиме лишь приближенно с той точностью,
которую дает линеаризация. Однако
следует помнить, что линеаризация
возможна только при достаточно малых
отклонениях величин и при отсутствии
разрывов в функции F
в окрестностях интересующей нас точки,
которые могут быть созданы различными
выключателями, реле и т.п.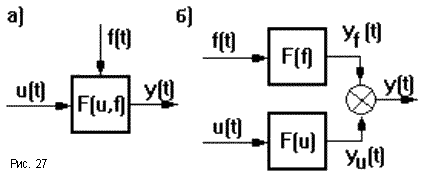
Обычно
n
![]() m,
так как при n
< m
САУ технически нереализуемы.
m,
так как при n
< m
САУ технически нереализуемы.
логические элементы защит. Обеспечение надежности действия тепловых защит
Автоматические системы защиты, обслуживающие тепловую часть предприятий, называют тепловыми защитами (ТЗ). Устройства ТЗ должны быть в постоянной готовности, но срабатывать только в том случае, когда возможности авто-матического или дистанционного управления по предотвращению отклонений параметров от установленных значений исчерпаны, а оператор не может вовремя на это реагировать.
По степени воздействия на защища-емые установки ТЗ разделяют на главные и локальные. К главным относят ТЗ, срабатывание которых приводит к останову основного обо-рудования, технологии в целом или к глубокому снижению их нагрузки. Локальные защиты предотвращают развитие аварии без останова основн агрегатов и снижения нагрузки.
Логические элементы защит.
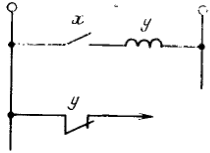
Инверсия. НЕ Ложное сообщение противоположно по смыслу истинному, г.е. служит его отрицанием. Обозначив истинную форму через 1, а ложную через 0, можно записать логическую операцию отрицания
Релейный
эквивалент операции НЕ
Логическое усиление. Сигнал на выходе появится вместе с сигналом на входе, но усиленный в k раз.y=kx, (0k, 0x)
Релейный
эквивалент
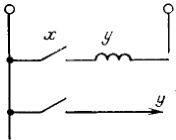
Конъюнкция (функция И) Сложное сообщение истинно только тогда, когда истинны все отдельные сообщения, его составляющие Сигнал на выходе элемента реализующего функцию И, появится только тогда, когда есть сигнал на всех его входах. Если истинное сообщение обозначить через 1, ложное через 0
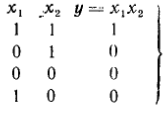
Релейный
эквивалент ф-ии И
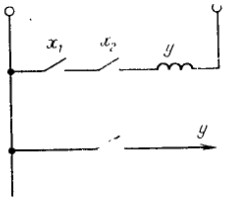
Дизъюнкция (функция ИЛИ) Сложное сообщение истинно, когда истинно хотя бы одно из сообщений, его составляющих Сигнал на выходе логического элемента, реализующего функцию ИЛИ, появится только тогда, когда есть сигнал хотя бы на одном из его входов

Релейный
эквивалент ф-ии ИЛИ
Обеспечение надежности действия тепловых защит
Автоматические системы защиты, обслуживающие тепловую часть предприятий, называют тепловыми защитами (ТЗ). Устройства ТЗ должны быть в постоянной готовности, но срабатывать только в том случае, когда возможности автоматического или дистанционного управления по предотвращению отклонений параметров от установленных значений исчерпаны, а оператор не может вовремя на это реагировать.
По степени воздействия на защищаемые установки ТЗ разделяют на главные и локальные. К главным относят ТЗ, срабатывание которых приводит к останову основного оборудования, технологии в целом или к глубокому снижению их нагрузки. Локальные защиты предотвращают развитие аварии без останова основан агрегатов и снижения нагрузки
Надежность
ТЗ определяется числом отказов в
срабатывании и количеством ложных
срабатываний. Ложное срабатывание-отказ
какого-либо элемента системы ТЗ (короткое
замыкание, приводящее к срабатыванию
системы в целом). Мера надежности-среднее
время на один отказ:
 ti-время
i
наработки м/ду отказами, n-число
отказов. Интенсивность потока отказов
ti-время
i
наработки м/ду отказами, n-число
отказов. Интенсивность потока отказов
 ,
τΣ-суммарное
время исправной работы системы ТЗ м/ду
ремонтно-восстановительными работами.
В соответствии с ГОСТ 17605-72 системы ТЗ
должны обладать минимальной интенсивностью
потока отказов по сравнению с
др.подсистемами АСУ ТП
,
τΣ-суммарное
время исправной работы системы ТЗ м/ду
ремонтно-восстановительными работами.
В соответствии с ГОСТ 17605-72 системы ТЗ
должны обладать минимальной интенсивностью
потока отказов по сравнению с
др.подсистемами АСУ ТП
 .Мероприятием,
повышающим надежность действия систем
ТЗ, служит использование для них
высоконадежных источников электрического
питания. Таким источником на ТЭС служит
аккумуляторная батарея с напряжением
на выходе 220 В, которая продолжает
снабжать цепи защиты электрической
энергией при авариях, сопровождаемых
полной потерей напряжения переменного
тока в системе собственных нужд.
.Мероприятием,
повышающим надежность действия систем
ТЗ, служит использование для них
высоконадежных источников электрического
питания. Таким источником на ТЭС служит
аккумуляторная батарея с напряжением
на выходе 220 В, которая продолжает
снабжать цепи защиты электрической
энергией при авариях, сопровождаемых
полной потерей напряжения переменного
тока в системе собственных нужд.
Кроме того, питающее напряжение подводят к панелям защит по двум независимым линиям, одна из которых служит резервной. Оповещение персонала о прекращении электрического питания каждой из групп ТЗ осуществляют автоматически с помощью сигнальных устройств, привлекающих повышенное внимание.
Рациональный выбор проектируемых ТЗ обуславливается положениями: 1)возможность дистанционного перевода всех агрегатов, оказавшихся под воздействием защит, в исходное положение 2)одностороннее воздействие защит на оборудование 3)сохранение действия автоматических систем защит до выполнения самой длительной операции 4)однозначная фиксация первопричины срабатывания ТЗ с помощью записи 5)наличие авто или ручного устройства отключения всех ТЗ 6)наличие переключателя видов топлива 7)наличие светозвуковой сигнализации
Билет №2
Классификация нелинейных звеньев и систем
Нелинейная система-система, в которой хотя бы в одном звене нарушается линейность статической характеристики или же имеет место любое другое нарушение линейности уравнений динамики звена (произведение переменных или их производных, корень, квадрат или более высокая степень переменной, любая другая нелинейная связь переменных и их производных).
Если система содержит несколько нелинейных элементов, сводим к классу, заменяя нелинейны элементы одним с результирующей статической характеристикой.
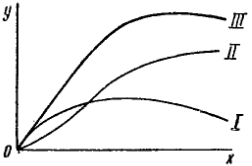
Построив на графике харак-ки I и II звеньев, суммируем их ординаты и получаем хар-ку III эквивалентного типа
Классификация нелинейных звеньев возможна по различным признакам. Наибольшее распространение получила классификация по статическим и динамическим характеристикам. Первые представляются в виде нелинейных статических характеристик, а вторые - в виде нелинейных дифференциальных уравнений. На рисунке приведены примеры однозначных (без памяти) и многозначных (с памятью) нелинейных характеристик. В этом случае учитывается направление (знак) скорости сигнала на входе.