

Статические характеристики нелинейных элементов
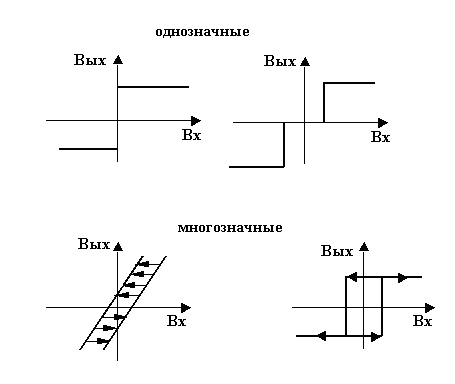
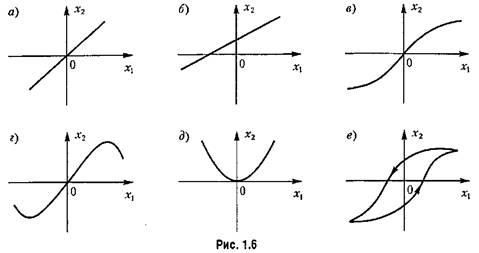
К нелинейным системам относятся, в частности, все системы, в звеньях которых имеются статические характеристики любого из многих видов, показанных па рис. 1.6, в-е.
Нелинейными могут быть, разумеется, также и системы с переменными параметрами, с распределенными параметрами, с запаздыванием, импульсные и цифровые системы, если в них где-либо нарушается линейность уравнений динамики.
Функциональная схема нелинейной системы
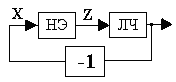
НЭ - нелинейный элемент; ЛЧ - линейная часть; Z(t) и X(t) - соответственно выход и вход нелинейного элемента.
Оценка устойчивости нелинейных систем
Теоремы Ляпунова для нелинейных систем
1)система устойчива в малом, если она устойчива при малых (бесконечно малых)начальных отклонениях 2)система устойчива в большом, если она устойчива при больших (конечных по величине) начальных отклонениях. Система устойчива в целом, если она устойчива при любых больших (не ограниченных по величине) начальных отклонениях.
При отыскании ф-ии Ляпунова траекториям заранее приписывают некоторую форму, параметры к-ой находятся по исходным уравнениям
Критерий Попова
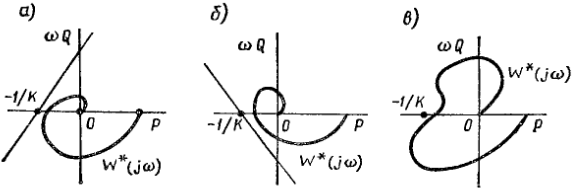
Система с устойчивой и вполне управляемой линейной частью абсолютно устойчива в классе стационарных нелинейных характеристик ξ=φ(σ), лежащих в секторе (0, К), если ч/з точку 1/К на вещественной оси комплексной плоскости (P, jQ) можно провести прямую так, чтобы преобразованная частотная характеристика Wn (jω)лежала справа от этой прямой
Условие Попова выполняется: а)при положительных τ б)при отрицательных τ в)не выполняется ни при каких τ
Критерий В.М.Попова может быть представлен или в алгебраической, или частотной форме, а также для случаев устойчивой и неустойчивой линейной части. Чаще используется частотная форма.
Формулировка
критерия В.М.Попова в случае устойчивой
линейной части: для установления
абсолютной устойчивости нелинейной
системы достаточно подобрать такую
прямую на комплексной плоскости W*(jω),
проходящую через точку (![]() ,
j0), чтобы вся кривая W*(jω) лежала справа
от этой прямой. Условия выполнения
теоремы показаны на рисунке.
,
j0), чтобы вся кривая W*(jω) лежала справа
от этой прямой. Условия выполнения
теоремы показаны на рисунке.
Графическая интерпретация критерия в.М. Попова для абсолютно устойчивой нелинейной системы
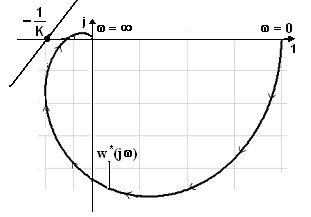
На
рисунке приведен случай абсолютной
устойчивости нелинейной системы при
любой форме однозначной нелинейности.
Таким образом, для определения абсолютной
устойчивости нелинейной системы по
методу В.М. Попова необходимо построить
видоизмененную частотную характеристику
линейной части системы W*(jω), определить
предельное значение коэффициента
передачи k нелинейного элемента из
условия
![]() и
через точку (-
и
через точку (-![]() )
на вещественной оси комплексной плоскости
провести некоторую прямую так, чтобы
характеристика W*(jω) лежала справа от
этой прямой. Если такую прямую провести
нельзя, то это значит, что абсолютная
устойчивость для данной системы
невозможна. Очертание нелинейности
может быть неизвестным. Критерий
целесообразно применять в случаях,
когда нелинейность может в процессе
работы САУ изменяться, или ее математическое
описание неизвестно.
)
на вещественной оси комплексной плоскости
провести некоторую прямую так, чтобы
характеристика W*(jω) лежала справа от
этой прямой. Если такую прямую провести
нельзя, то это значит, что абсолютная
устойчивость для данной системы
невозможна. Очертание нелинейности
может быть неизвестным. Критерий
целесообразно применять в случаях,
когда нелинейность может в процессе
работы САУ изменяться, или ее математическое
описание неизвестно.
Абсолютной устойчивостью называется устойчивость системы при любых начальных отклонениях для любой формы нелинейной характеристики, принадлежащей к одному из определенных классов.
.Частотный критерий абсолютной устойчивости нелинейных систем В.М. Попова.
Данный критерий дает дост. условия абсолютной устойчивости нелинейной системы по виду частот. характеристики линейной части системы.
Нелинейность лежит внутри [0, kmax]
0<F(x)<kmaxX

Состояние
равновесия нелинейной системы будет
абсолютно устойчивым, если нелинейная
характеристика находится в секторе
[0,kmax]
и существует такое действительное число
h,
что при всех частотах w≥0
выполняется


Нелинейность лежит внутри [0, kmax]
Графическая интерпретация.
1.Состояние равновесия нелинейной системы абсолютно устойчиво, если нелинейная характеристика F(x) находится внутри сектора [0,kmax] и можно привести через точку (-1/kmax,0) прямую таким образом, что она не пересечет модифицированную частотную характеристику вида:Wм(jw)=Uлч(w)+jwVлч(w)



2. [kmin,kmax]
kminX<F(x)<kmaxX

Геометрическая интерпретация. Состояние равновесия нелинейной системы абсолютно устойчиво, если через точки -1/kmin, -1/kmaxможно провести параболу таким образом, чтобы она не пересекала модифицированную АФХ.
Автоматические системы защиты технологического оборудования.
Назначение защит
Автоматические системы защиты, обслуживающие тепловую часть предприятий, называют тепловыми защитами (ТЗ). Устройства ТЗ должны быть в постоянной готовности, но срабатывать только в том случае, когда возможности автоматического или дистанционного управления по предотвращению отклонений параметров от установленных значений исчерпаны, а оператор не может вовремя на это реагировать.
Следовательно, ТЗ призваны воздействовать на объект управления лишь в исключительных случаях: в предаварийном (аварийном) положении или при резких и глубоких сбросах тепловой или электрической нагрузок.
По степени воздействия на защищаемые установки ТЗ разделяют на главные и локальные. К главным относят ТЗ, срабатывание которых приводит к останову основного оборудования, технологии в целом или к глубокому снижению их нагрузки. Локальные защиты предотвращают развитие аварии без останова основных агрегатов и снижения нагрузки. Чаще всего ТЗ служат для предотвращения аварии оборудования при отклонениях параметров за допустимые пределы. Воздействие защит связано с открытием (закрытием) запорных органов, остановом основного или вспомогательного оборудования или включением его резерва.
Простейшим примером ТЗ служит предохранительный клапан с уравновешивающим грузом или гидрозатвор, устанавливаемый по правилам котлонадзора на всех сосудах, находящихся под избыточным давлением.
Большинство современных защитных устройств — автоматические системы, состоящие из отдельных связанных между собой элементов: первичных измерительных преобразователей, снабженных электрическими контактами (датчиками), промежуточных реле, усилителей и коммутирующих устройств для исполнительных механизмов или электроприводов. Действие ТЗ часто увязывают с работой элетроблокировочных устройств, позволяющих включать или отключать электрические приводы вспомогательных агрегатов только в определенной последовательности — "по цепочке". Например, аварийный останов дымососов приводит через устройства электроблокировки к останову дутьевых вентиляторов и топливоподающих устройств.
1)Защита от потускнения и погасания факела 2)Котлы, работающие на пылевидном топливе, снабжают защитой от потускнения факела, воздействующей на подачу резервного топлива 3)Защита от понижения температуры перегрева первичного пара 4)Защиты от повышения температуры первичного пара сверх установленного максимального значения. 5)Защита от прекращения подачи воды 6)Защита от разрыва труб водяного экономайзера.7) Аналогично могут быть устроены ТЗ от повреждения других поверхностей нагрева.
Билет №3
Построение методом трапецеидальных вещественных частотных характеристик
По
вещественной частотной характеристике
Re(w)
аналитически определяется выражение
для переходного процесса
 .
Вычислить данный интеграл аналитически
не всегда получается, поэтому прибегают
к аппроксимации частотных характеристик
линейными участками, при этом вчх пред-ся
в виде суммы типовых трапеций, для каждой
трапеции по табл.Солодовникова строятся
кривые переходного процесса, соот-ие
каждому участку вчх. Для каждой трапеции
опред-т 3 параметра: 1)высота трапеции
2)частота, харак-ое постоянство вчх
3)частота, харак-ая наклон вчх.
.
Вычислить данный интеграл аналитически
не всегда получается, поэтому прибегают
к аппроксимации частотных характеристик
линейными участками, при этом вчх пред-ся
в виде суммы типовых трапеций, для каждой
трапеции по табл.Солодовникова строятся
кривые переходного процесса, соот-ие
каждому участку вчх. Для каждой трапеции
опред-т 3 параметра: 1)высота трапеции
2)частота, харак-ое постоянство вчх
3)частота, харак-ая наклон вчх.
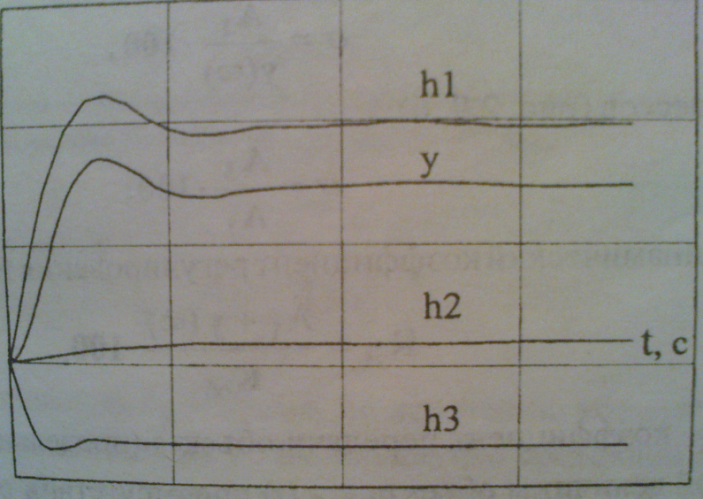
На рис.ACDE и EFH0 трапеции
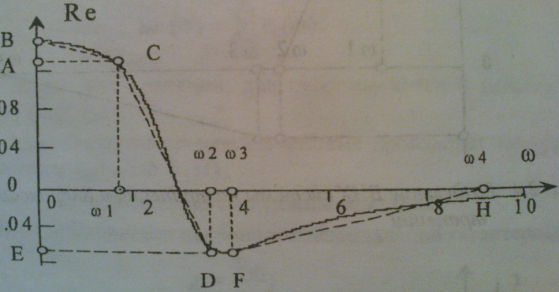
Последовательность действий: 1)вчх пред-т в виде группы трапеций 2)для каждой трапеции опред-т амплитуду, Re(0) wd,wc,χ 3)исп-т табл.Солодовникова, опр-т h-фун-ию для каждой трапеции 4)путем домножения частоты wd на действительное (реальное) время t опре-т значение безразмерного времени (τ) τ= wd∙t 5)из табл.Солодовникова опр-т значение переходных процессов для кажого участка вчх (h1,h2,h3) 6)аналогично строят переходные процессы для др.трапеций 7)путем сложения ординат переходных хар-к h1(t),h2(t),h3(t) в соот-их точках оси в соот-ий моменты времени получают график переходного процесса для всей системы
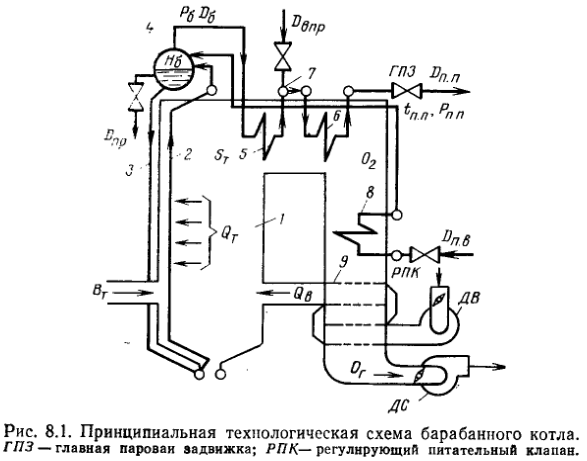
АСР питания барабанного котла
Топливо поступает через горелочные устройства в топку 1, где сжигается обычно факельным способом. Для поддержания процесса горения в топку подается воздух в количестве QB. Он нагнетается с помощью вентилятора ДВ и предварительно нагревается в воздухоподогревателе 9. Образовавшиеся в процессе горения дымовые газы Qr отсасываются из топки дымососом ДС. Попутно они проходят через поверхности нагрева пароперегревателей 5, 6, водяного экономайзера 8, воздухоподогревателя 9 и удаляются через дымовую трубу в атмосферу. Процесс парообразования протекает в подъемных трубах циркуляционного контура 2, экранирующих камерную топку и снабжаемых водой из опускных труб 3. Насыщенный пар Dб из барабана 4 поступает в пароперегреватель, где нагревается до установленной температуры за счет радиации факела и конвективного обогрева топочными газами. При этом температура перегрева пара регулируется в пароохладителе 7 с помощью впрыска воды Dвnp.
Основными регулируемыми величинами котла являются расход перегретого пара Dпn, его давление pпп и температура tпп. Расход пара является переменной величиной, а его давление и температура поддерживаются в пределах допустимых отклонений, что обусловливается требованиями заданного режима работы турбины или иного потребителя тепловой энергии.
Кроме того, следует поддерживать в пределах допустимых отклонений значения следующих величин: уровня воды в барабане Hб — регулируется изменением подачи питательной воды Dпв;
разрежения в верхней части топки SТ — регулируется изменением производительности дымососов, отсасывающих дымовые газы из топки;
оптимального избытка воздуха за пароперегревателем а(O2)—регулируется изменением производительности дутьевых вентиляторов, нагнетающих воздух в топку;
солесодержания котловой воды (в пересчете на NaCI)—регулируется изменением расхода воды Dnv, выпускаемой из барабана в расширитель непрерывной продувки.
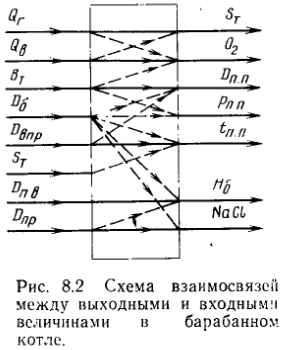
Перечисленные величины изменяются в результате регулирующих воздействий и под действием внешних и внутренних возмущений, носящих детерминированный или случайный характер. Котел в целом, например, по каналу топливо — расход или давление пара, является системой направленного действия. Однако выходные регулируемые величины некоторых участков являются одновременно входными по отношению к другим. Например, расход перегретого пара А,.п, являясь выходной величиной по отношению к расходу топлива Вт, служит входным воздействием по отношению к давлению и температуре перегретого пара; давление пара в барабане ре, являясь выходной величиной по отношению к расходу топлива, является также одним из входных воздействий участка регулирования уровня воды в барабане Не.
Следовательно, котел как объект управления представляет собой сложную динамическую систему с несколькими взаимосвязанными входными и выходными 226
величинами (рис. 8.2). Однако явно выраженная направленность отдельных участков по основным каналам регулирующих воздействий, таким как расход воды на впрыск DBnp — перегрев /п.п, расход топлива Вт — давление рм.п и др., позволяет осуществлять стабилизацию регулируемых величин с помощью независимых одноконтурных систем, связанных лишь через объект управления. При этом регулирующее воздействие того или иного участка (сплошные линии на рис. 8.2) служит основным способом стабилизации его выходной величины, а другие воздействия (пунктирные линии) являются по отношению к этому участку внутренними или внешними возмущениями.
Система управления барабанным котлом включает автономные АСР процессов горения и парообразования, температур перегрева пара, питания и водного режима.
Принято, что максимально допустимые отклонения уровня воды в барабане составляют ±100 мм среднего значения, установленного заводом-изготовителем. Среднее значение уровня может не совпадать с геометрической осью барабана. Максимально допустимые отклонения уточняются з процессе эксплуатации. Снижение Уровня за пределы водомерного стекла, устанавливаемого на барабане, считается «упуском» воды, а превышение его верхней видимой части — «перепиткой». Расстояние между этими критическими отметками 400 мм.
Снижение уровня до места присоединения опускных труб циркуляционного контура может привести к нарушению питания и охлаждения водой подъемных труб (см. рис. 8.1). Следствием этого может быть нарушение прочности труб в местах стыковки с корпусом барабана, а в наиболее тяжелом случае — пережог. Чрезмерное повышение уровня может привести к снижению эффективности внутрибарабанных сепарапионных устройств и преждевременному заносу солями пароперегревателя. Перепитка барабана и заброс частиц воды в турбину может явиться причиной тяжелых механических повреждений ее ротора и лопаток. Снабжение барабана водой осуществляется по одной и, реже, двум ниткам трубопроводов питательной воды, одна из которых служит резервной.
Отклонение
уровня воды в барабане от среднего
значения связано с наличием небаланса
между притоком питательной воды и
расходом пара; оно происходит также
вследствие изменения содержания пара
в пароводяной смеси подъемных труб за
счет колебаний давления пара в барабане
или изменений тепловосприятия
испарительных поверхностей нагрева. 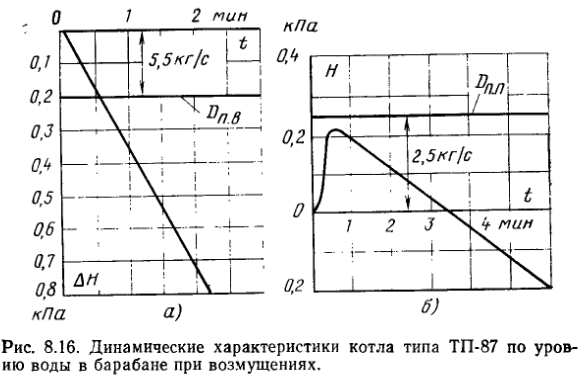
Кривая переходного процесса по уровню воды в барабане при возмущении расходом питательной воды для котлов типа ТП-87 (Dnn=420 т/ч) приведена на рис. 8.16,а. Динамика этого же участка при возмущении расходом пара — на рис. 8.16,6. Выпуклая форма кривой изменения уровня при возмущении увеличением расхода пара объясняется тем, что в первый момент после нанесения возмущения уровень воды в барабане возрастает в результате резкого уменьшения давления пара. Это в свою очередь приводит к увеличению паросодержания в подъемных трубах циркуляционного контура и росту уровня. После того как давление пара в барабане примет новое установившееся значение, соответствующее новому значению расхода пара, изменение уровня будет протекать в соответствии с уравнением материального баланса. Описанное явление носит название набухания или вспучивания уровня.
При математическом моделировании динамики участка по уровню при возмущении расходом пара он обычно описывается разностью апериодического и интегрирующего звеньев.
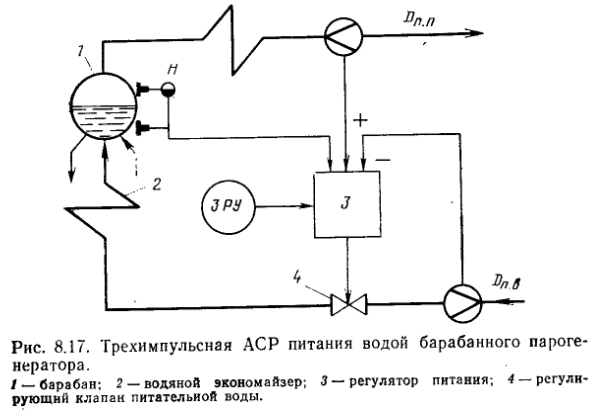
Схема автоматического регулирования. Исходя из требований к регулированию уровня воды в барабане, автоматический регулятор должен обеспечить постоянство среднего уровня независимо от нагрузки котла и других возмущающих воздействий. В переходных режимах изменение уровня может происходить довольно быстро, поэтому регулятор питания для обеспечения малых отклонений уровня должен поддержать постоянство соотношения расходов питательной воды и пара. Эту задачу выполняет трехимпульсный регулятор, принципиальная схема которого изображена на рис. 8.17. Регулятор 3 перемещает клапан 4 при появлении сигнала небаланса между расходами питательной воды Dпв и пара Dпп. Кроме того, он воздействует на положение питательного клапана при отклонениях уровня от заданного значения. Такая АСР питания, совмещающая принципы регулирования по отклонению и возмущению, получила наибольшее распространение на мощных барабанных котлах.
Билет №4
Устойчивость линеаризованных систем
Устойчивость-св-во системы, при к-ой возможно ее отрегулировать
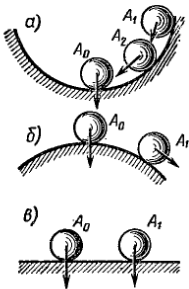
Устойчивость равновесия на рис.а-шар в углублении, б-шар на выпуклой поверхности, в-шар на плоскости. Положение равновесия шара в точке А0. В случае а)система устойчивая б)неустойчивая в)находящаяся на границе устойчивости
Теоремы Ляпунова
Система устойчивая при малых возмущениях будет устойчива и при больших, поэтому для определения устойчивости системы достаточно исследовать и определить устойчивость “в малом” (малый-устойчивость уравнения системы приращения)
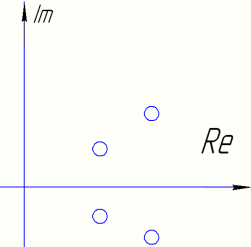
1)Если характеристическое уравнение линеаризованной системы имеет все корни дифференцильного уравнения с отрицательными вещественными частями, то действительная система устойчива, при этом никакие члены высшего порядка малости, отброшенные при линеаризации не могут изменить устоичивость системы P→iω; Re,Iω
2)Если характеристическое уравнение линеаризованной системы имеет хотя бы один корень с положительной вещественной частью, то действительная система неустойчива, при этом никакие члены высшего порядка малости, отброшенные при линеаризации не могут изменить устойчивость системы
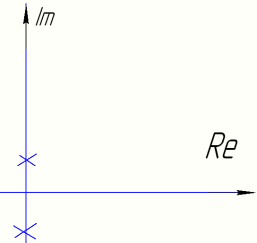
3)Если характеристическое уравнение линеаризованной системы имеет хотя бы один нулевой корень или пару мнимых сопряженных корней, поведение системы невозможно определить по линеаризованным дифференциальным уравнениям, при этом отброшенные члены высшего порядка малости значительно изменяют описание динамического процесса реальной системы
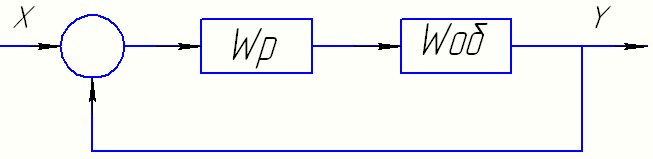
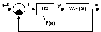
Wp-передаточная
функция регулятора; Wоб-передаточная
ф-ия объекта; Wp=k=5i;
 ;
;
 ;Wp∙Wоб∙x=y+Wp∙Wоб∙y;
;Wp∙Wоб∙x=y+Wp∙Wоб∙y;
 ;
25x=(10p+26)y;
p=d/dt;
10∙(dy/dt)+26y=25x;
y=yсвоб+yвынужд;
yвынужд-опред-ся
отношением коэфф-ов, стоящих перед
входной и выходной переменной (26,25).
Yсвобсвободная
составляющая опред-ся из решения диффер.
ур-ия, содержащего только выходную
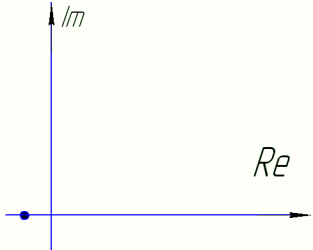
переменную (10р+26)у=0; 10р+26=0; р=–2,6;
p=[Re]+[Im]∙i;
;
25x=(10p+26)y;
p=d/dt;
10∙(dy/dt)+26y=25x;
y=yсвоб+yвынужд;
yвынужд-опред-ся
отношением коэфф-ов, стоящих перед
входной и выходной переменной (26,25).
Yсвобсвободная
составляющая опред-ся из решения диффер.
ур-ия, содержащего только выходную
переменную (10р+26)у=0; 10р+26=0; р=–2,6;
p=[Re]+[Im]∙i;
Вывод: система устойчива. Для суждения об устойчивости систем необходимо определить расположение корней дифф.ур-ия комплексной плоскости, при этом нет необходимости вычислять сами корни (определяем только в какой области относительно сои абсцисс они находятся). Критерий устойчивости-математичесая формулировка условий, которым должны удоволетворять коэфф-ты характеристического ур-ия системы или какие-либо ф-ии от этих коэфф-ов. Критерии:1)алгебраические 2)частотные. Алгебраические: 1)критерий Гурвица 2)критерий Раусса. Частотные критерии: 1)критерий Найклиста 2)критерий Михайлова
Критерий устойчивости Гурвица.
Для оценки устойчивости по этому критерию необходимо из коэффициентов характеристического уравнения составить определитель Гурвица по следующим правилам:
по главной диагонали выписываются все коэффициенты характеристического уравнения от а1 до аn в порядке возрастания индексов;
столбцы определителя заполняются коэффициентами от главной диагонали вниз по убывающим, а вверх- по возрастающим индексам;
места коэффициентов, индексы которых больше n или меньше нуля заполняются нулями.
Для примера составим определитель Гурвица, для системы 5-го порядка. Характеристическое уравнение системы имеет вид

где все коэффициенты строго больше нуля. Получим
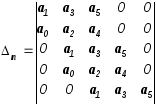 .
.
Для того, чтобы все корни характеристического уравнения имели отрицательные вещественные части и система была устойчивой необходимо и достаточно, чтобы все коэффициенты и все диагональные определители определителя Гурвица были строго больше нуля.
Для устойчивости системы 5-го порядка необходимо выполнение условий
аk>0, k=0,1,2,...5;
2 =а1а2 - а0а3>0;
3=а32 - а12а4>0;
4 =а43 -а2а52 + а0а5(а1а4 - а0а5)>0;
5 =а54>0.
Так как при выполнении необходимого условия устойчивости всегда аn>0, то об устойчивости системы можно судить по определителям до n-1 включительно. Доказано, что если n-1=0, то система находится на колебательной границе устойчивости, т.е. имеет пару чисто мнимых корней. Из условия n-1=0 можно определить критические значения параметров системы, при которых она выходит на границу устойчивости.
Пример. Исследовать устойчивость системы стабилизации угла тангажа самолета и определить критическое значение передаточного числа автопилота по углу тангажа. Система задана структурной схемой.
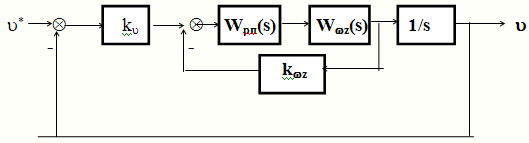
На схеме обозначено:
k- передаточное число (коэффициент передачи) автопилота по углу тангажа;
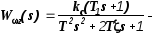
 передаточная
функция рулевого привода;
передаточная
функция рулевого привода;
 передаточная
функция самолета по угловой скорости
тангажа z;
передаточная
функция самолета по угловой скорости
тангажа z;
kz - передаточное число автопилота по угловой скорости тангажа.
Для передаточной функции разомкнутой системы можно записать

где


Передаточная функция замкнутой системы примет вид

где


Составим определитель Гурвица
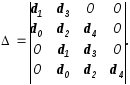
Оценим устойчивость системы для следующих значений параметров:

 .
.
При этих значениях для коэффициентов характеристического уравнения получим



Следовательно, все коэффициенты характеристического уравнения замкнутой системы положительны и
Условия устойчивости выполнены и система при избранных параметрах устойчива.
Определим критическое значение передаточного числа по углу тангажа, для чего приравняем третий диагональный определитель нулю и сделаем преобразования.

Отсюда
В последнем выражении только d3 и d4 являются функциями коэффициента k и подставив их в него, получим квадратное уравнение относительно этого коэффициента

Решив это уравнение, получим критическое значение передаточного числа по углу тангажа

Система устойчива, если k<16.56.
3.3.3. Критерий устойчивости Рауса.
Критерий Рауса требует несколько меньшего объема вычислений, чем критерий Гурвица и более удобен для программирования на ЭВМ. Для суждения об устойчивости системы по этому критерию необходимо составить таблицу Рауса.
Таблица Рауса
|
i (номер строки) |
k (номер столбца) | ||||||||
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
……. | |
|
1 |
d0 |
d2 |
d4 |
d6 |
d8 |
d10 |
d12 |
d14 |
....... |
|
2 |
d1 |
d3 |
d5 |
d7 |
d9 |
d11 |
d13 |
d15 |
....... |
|
3 |
c13 |
c23 |
c33 |
c43 |
c53 |
c63 |
c73 |
..... |
....... |
|
4 |
c14 |
c24 |
c34 |
c44 |
c54 |
c64 |
c74 |
...... |
....... |
|
5 |
c15 |
c25 |
c35 |
c45 |
c55 |
c65 |
..... |
....... |
....... |
|
6 |
c16 |
c26 |
c36 |
c46 |
c56 |
....... |
........ |
...... |
........ |
|
7 |
c17 |
c27 |
c37 |
c47 |
....... |
....... |
......... |
....... |
....... |
|
8 |
c18 |
c28 |
c38 |
....... |
........ |
....... |
......... |
........ |
......... |
Элементы каждой строки для i>2 вычисляются по формуле

Для того, чтобы корни характеристического уравнения лежали в левой полуплоскости и система была устойчива, необходимо и достаточно, чтобы все элементы первого столбца таблицы Рауса были строго положительны.
Критерий устойчивости Найквиста.
Критерий устойчивости Найквиста позволяет судить об устойчивости замкнутой системы по виду АФЧХ разомкнутой системы.
Пусть передаточные
функции разомкнутой и замкнутой системы
имеют вид:


Введем функцию
 ( 3.17)
( 3.17)
где D(s)- характеристический полином замкнутой системы. Перейдя к частотным представлениям, получим
 (3.18)
(3.18)
Вектор N(j) называется вектором Найквиста. Очевидно, что числитель и знаменатель этого вектора имеют один и тот же порядок n. При использовании критерия Найквиста следует различать два случая.
1). Разомкнутая система устойчива и ее характеристическое уравнение A(s)=0 имеет все корни в левой полуплоскости. Тогда при изменении частоты от 0 до
 (3.19)
(3.19)
Изменение аргумента вектора D(j) в общем случае равно
 (3.20)
(3.20)
где m- число корней уравнения D(s)=0, лежащих в правой полуплоскости.
Изменение аргумента вектора Найквиста будет
 (3.21)
(3.21)
Если замкнутая система устойчива, то m=0 и

Так как при , W(j)0, то N(j)1. Рассмотрим рисунок 3.8а, на котором показана кривая Найквиста, которую описывает вектор Найквиста при изменении частоты от 0 до . Нетрудно убедиться, что вектор Найквиста опишет угол, равный нулю только в случае, если его годограф не охватывает начало координат. Перенесем начало координат в точку с координатами (1,j0) (рис.3.9б). Можно убедиться, что изменение аргумента вектора Найквиста будет равно нулю если АФЧХ W(j) разомкнутой системы не охватывает критическую точку с координатами (-1,j0).











а) б)
Рис. 3.9. К определению критерия Найквиста
Критерий Найквиста для рассматриваемого случая формулируется следующим образом.
Система автоматического управления, устойчивая в разомкнутом состоянии, будет устойчивой и в замкнутом состоянии, если АФЧХ W(j) разомкнутой системы при изменении частоты от 0 до не охзватывает критическую точку с координатами (-1, j0).
Особенности возникают, если разомкнутая система нейтрально-устойчива, т.е.

где полином A1(s) имеет все корни в левой полуплоскости. При =0 АФЧХ разомкнутой системы W(j)= и проследить поведение кривой АФЧХ в окрестности этой точки невозможно. При изменении частоты от - до + наблюдается движение корней вдоль мнимой оси снизу вверх и при =0 происходит бесконечный разрыв. При этом движении обойдем нулевой корень (рис.3.10) по полуокружности бесконечно малого радиуса так, чтобы этот корень остался слева, т.е. искусственно отнесем его к левой полуплоскости.
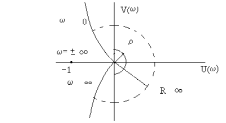









Рис. 3.10. Годограф Найквиста для нейтрально- устойчивой САУ
При движении по этой полуокружности в положительном направлении независимая переменная изменяется по закону

где фаза () изменяется от - / 2 до + / 2. Подставив это выражение в передаточную функцию вместо множителя s в знаменателе, получим

где R при 0 , а фаза () изменяется от + / 2 до - / 2. Следовательно, в окрестности нулевого корня годограф W(j) представляет собой часть окружности бесконечно большого радиуса, движение по которой происходит при увеличении частоты в отрицательном направлении.
Для оценки устойчивости замкнутой системы, если разомкнутая система нейтрально устойчива, необходимо АФЧХ W(j) разомкнутой системы дополнить дугой бесконечно большого радиуса, начиная с меньших частот, в отрицательном направлении и для полученной замкнутой кривой воспользоваться критерием Найквиста для систем, устойчивых в разомкнутом состоянии.
2).Разомкнутая система неустойчива. В этом случае

где р- число корней характеристического уравнения разомкнутой системы, лежащих в правой полуплоскости. Если замкнутая система устойчива, т.е. m=0, то
 ( 3.22)
( 3.22)
т.е. АФЧХ разомкнутой системы охватывает критическую точку (-1,j0) в положительном направлении ровно p / 2 раз.
Система, неустойчивая в разомкнутом состоянии, будет устойчивой в замкнутом состоянии, если АФЧХ W(j с) разомкнутой системы при изменении частоты от 0 до охватывает критическую точку (-1,j0) в положительном направлении ровно р/2 раз, где р- число правых полюсов разомкнутой системы.
Определение числа охватов критической точки- непростая задача, особенно в случае систем высокого порядка. Поэтому в практических приложениях нашла применение другая формулировка критерия Найквиста для рассматриваемого случая.
Переход годографа W(j) через отрезок вещественной полуоси (-,-1), т.е. левее критической точки при увеличении частоты сверху вниз считается положительным, а снизу вверх- отрицательным.
Система, неустойчивая в разомкнутом состоянии, будет устойчивой в замкнутом состоянии, если разность между числом положительных и отрицательных переходов АФЧХ разомкнутой системы равна р/2.
 (3.23)
(3.23)
где
 число положительных переходов,
число положительных переходов, число
отрицательных переходов.
число
отрицательных переходов.
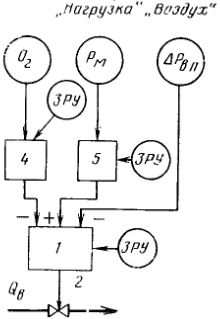
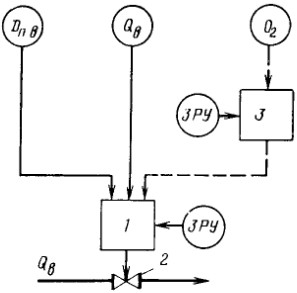
Аср воздуха прямоточного котлоагрегата: <<нагрузка-воздух>>, <<вода-воздух>>>, <<топливо-воздух>>, <<тепло-воздух>>
Регулирование нагрузки и питания прямоточного котла осуществляется в рамках единой системы:1)система регулирования тепловой нагрузки и питания 2)регулирование экономичности процесса горения 3)рег-ие разряжения в верхней части котла 4)рег-е tпп
Нагрузка-воздух
![]()
Регулирование экономичности по соотношению нагрузка-воздух с дополнительным сигналом по содержанию O2 в дымовых газах. Содержание O2 в продуктах сгорания хар-т избыток воздуха и слабо зависит от состава топлива. В промышленности получили распространение схемы регулирования с корректирующим воздействием по O2. Регулятор подачи воздуха 1 изменяет расход по сигналу от корректирующего регулятора давления 5. Сигнал, пропорциональный расходу воздуха ∆pвп: устраняет возмущения по расходу воздуха, способствует стабилизации процесса регулирования подачи воздуха
Вода-воздух
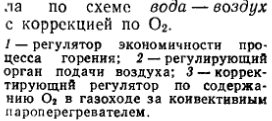
Топливо-воздух
![]()
При постоянном качестве топлива его расход и кол-во воздуха, необ-ое для обеспечения полноты сгорания, связаны прямой зависимостью. Схема регулирования топливо-воздух применяется, если измерение расхода топлива осущ-ся точно. Газ: сравниваются перепады давлений на сужающем устройстве, устанавливаемом на газопроводе и на воздухоподогревателе, разность этих сигналов подается на вход автоматического регулятора экономичности, управляющего производительностью дутьевых вентиляторов. Твердое топливо: по положению траверсы плоского контроллера. Схема топливо-воздух для жидкого и газообразного топлива
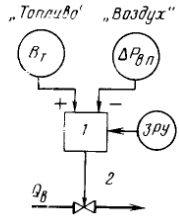
Тепло-воздух
Если регулятор топлива строится по схеме “нагрузка-тепло”, то регулятор воздуха будет строится по схеме “тепло-воздух”
ГА-газоанализатор; КС-корректирующий сигнал
Билет №5
Типовые связи между звеньями в структурных схемах системы
Типовые связи между звеньями в структурных схемах системы
Теория автоматического управления выделяет типовые связи: 1)последовательное 2)параллельное 3)встречно-параллельное
1)Последовательное соединение-соединение, при к-ом выходная переменная предыдущего звена является входной переменной для последующего звена
.
При преобразовании структурных схем
цепочку последовательно соединенных
звеньев можно заменить одним звеном с
передаточной ф-ей, равной произведению
передаточных ф-ий отдельных звеньев.
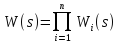 .
Wэкв=W1∙W2
.
Wэкв=W1∙W2
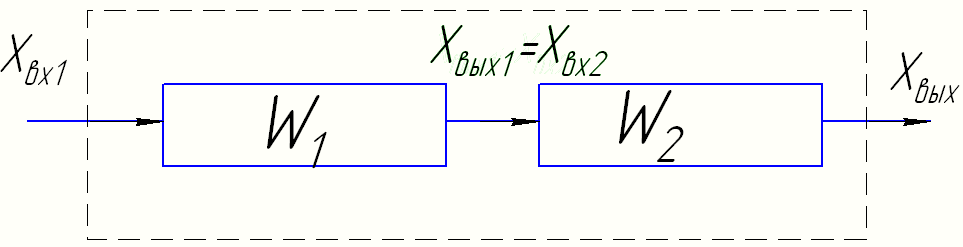
2)
Параллельное соединение-соединение,
при к-ом один и тот же входной сигнал
поступает на вход 2х и более звеньев, а
выходные значения сигналов этих звеньев
суммируются. Цепь из параллельно
соединенных звеньев можно заменить
одним звеном с передаточной ф-ей W(s),
равной сумме передаточных ф-ий входящих
в нее звеньев.
 .Wэкв=W1+W2
.Wэкв=W1+W2
3)
Встречно-параллельное-соединение, при
к-ом на вход звена одновременно с входной
переменной подается выходная величина
(может пердаваться ч/з звено обратной
связью ) -эквивалент связи для рис.1; 1-пердаточная
ф-ия обратной связи.
-эквивалент связи для рис.1; 1-пердаточная
ф-ия обратной связи. -эквивалент для рис.2
-эквивалент для рис.2
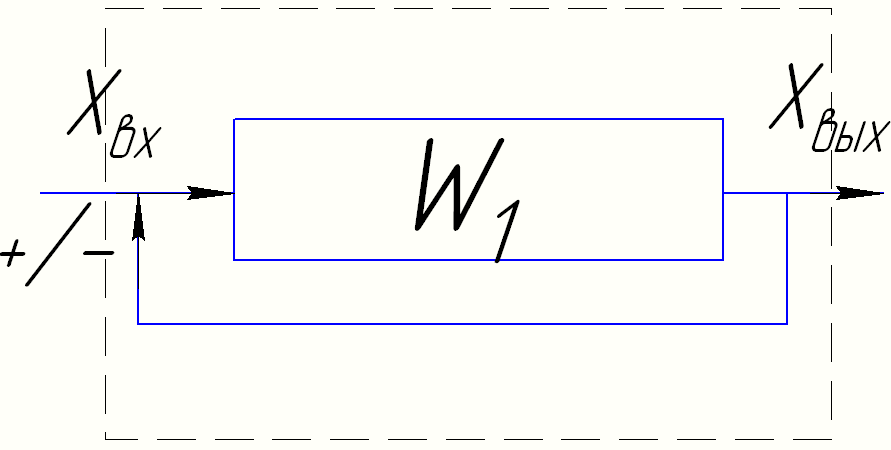
Рис.1
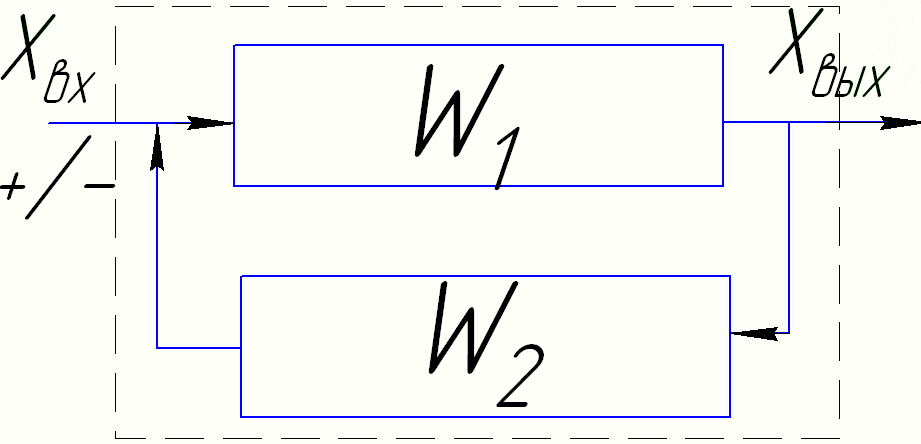
Рис.2
Аср нагрузки прямоточного котла, работающего на твердом, жидком, газообразном топливе
Регулирование тепловой нагрузки, характеризуемой давлением и расходом пара, требует совместного и согласованного изменения Bт и Dпв. Температурный режим, характеризуемой температурой пара, зависит от соотношения расходов воды и топлива. Поэтому АСР подачи топлива и питательной воды для прямоточных котлов следует налаживать совместно.
Основной сигнал системы регулирования температурного режима первичного тракта-расход питательной воды Dпв, кол-во теплоты Dq. Основной сигнал фактической тепловой нагрузки котла- расход питательной воды Dпв, кол-во теплоты Dq и расход топлива Bт.
1)Регулирование питания “теплота-расход воды”
Первый вариант-регулятор питания, действующий по сигналам задание-вода, поддерживает нагрузку агрегата в соответствии с заданием. РП-регулятор питания; РО-регулирующий орган; ЗРУ-задатчик ручного управления;
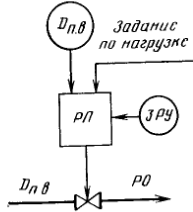
Второй вариант-температурный режим поддерживает регулятор питания

Расходы Dпв и Bт должны быть согласованы, тк от их величин зависит положение переходной зоны и параметров: Dпп, tпп, Рпп.
2)Регулирование топлива
“Вода-тепло”
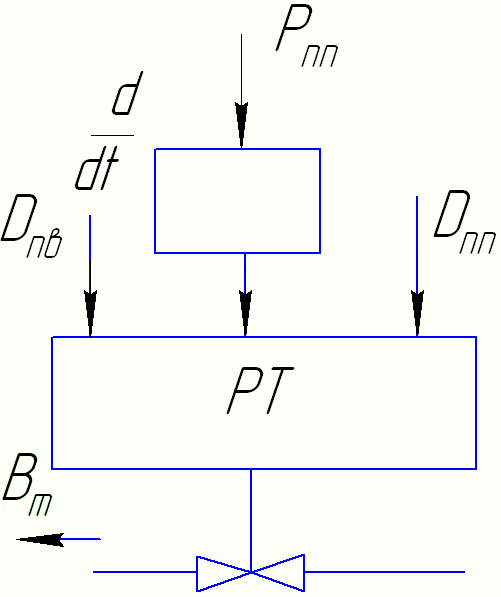
Расход Dпв-сигнал задания для регулятора питания и является регулируемым параметром РП, РП-ведущий, РТ-ведомый
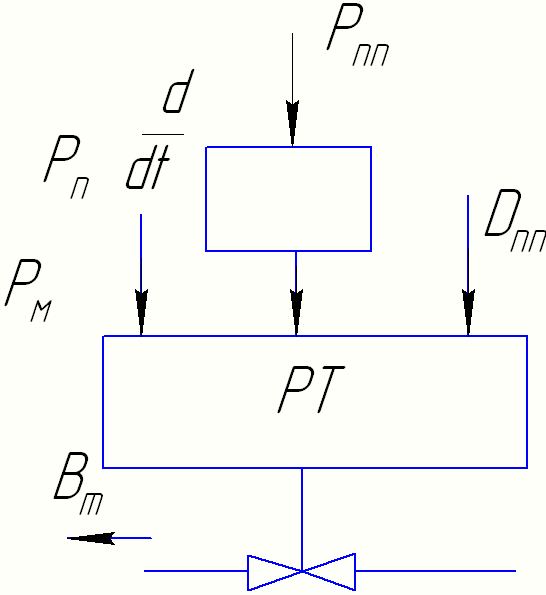
“Нагрузка-тепло”
Сигнал задания по нагрузке поступает от корректирующего регулятора давления в общей магистрали, либо с регулятора давления за турбиной. Регулятор топлива-ведущий, регулятор питания-ведомый; РП строится по схеме “тепло-вода”, РТ изменяет Dпв (РП поддерживает Dпв)
Рм-давление в магистрали-сигнал задания в системе с несколькими котлами
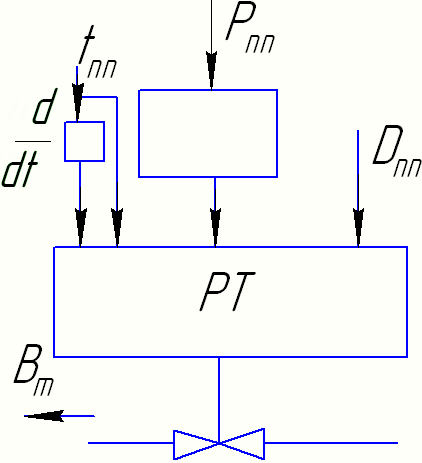
“Температура-тепло”
Применение двойного импульса по заданию позволяет динамично реагировать как на изменение температуры перегретого пара, так и расхода топлива Bт, Bт опред-ся ч/з импульс по теплу, в таком случае прим-ся каскадная система регулирования, РП стоим по схеме “нагрузка-вода”
Билет№6
Основные понятия автоматики. Формы автоматизации
Автоматическим регулированием-поддержание постоянной или изменение по заданному закону некоторой величины, характеризующей процесс, осуществляемое при помощи измерения состояния объекта или действующих на него возмущений и воздействия на регулирующий орган объекта.
Под автоматическим управлением понимается автоматическое осуществление совокупности воздействий, выбранных из множества возможных на основании определенной информации и направленных на поддержание или улучшение функционирования управляемого объекта в соответствии с целью управления.
Управление каким-либо объектом — это процесс воздействия на него с целью обеспечения требуемого течения процессов в объекте или требуемого изменения его состояния.
Техническое устройство, с помощью которого осуществляется автоматическое управление объектом, называется управляющим устройством (прибором, системой или комплексом). Совокупность объекта управления и управляющего устройства образует систему автоматического управления (САУ) или автоматическую систему управления.
Объект управления (ОУ) – устройство (система), осуществляющее технический процесс и нуждающееся в специально организованных воздействиях извне для осуществления его алгоритма функционирования.
Объектами управления являются, например, как отдельные устройства электрической системы (турбогенераторы, силовые преобразователи электрической энергии, нагрузки), так и электрическая система в целом.
Алгоритм управления – совокупность предписаний, определяющая характер воздействий извне на объект управления, обеспечивающих его алгоритм функционирования.
Устройство управления (УУ) – устройство, осуществляющее в соответствии с алгоритмом управления воздействие на объект управления..
Автоматическая система управления (САУ) – совокупность взаимодействующих между собой объекта управления и устройства управления.
Рис. 1.1. Блок-схема (а) и функциональная схема (б) системы автоматического управления
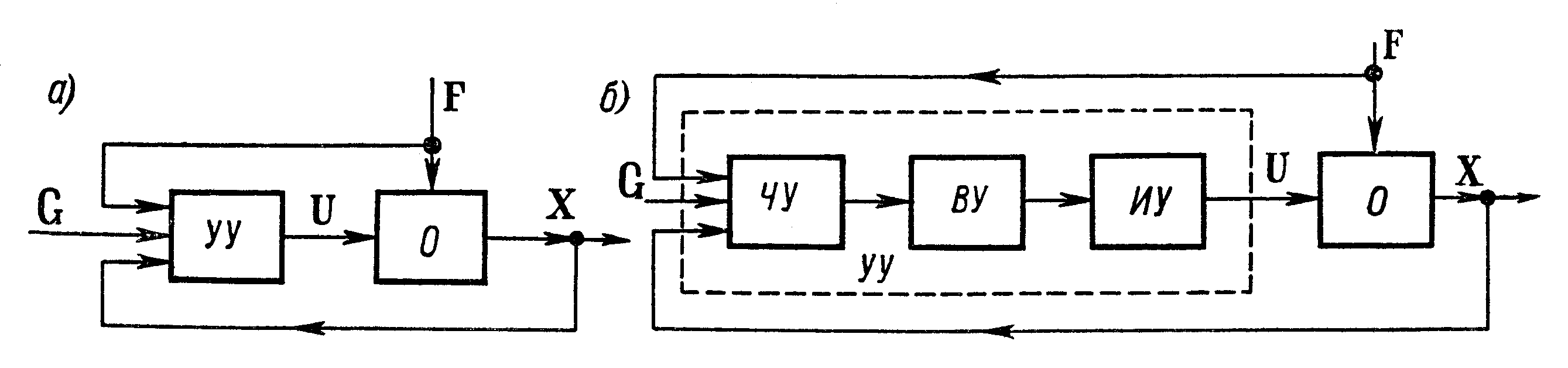
О — объект управления, УУ — управляющее устройство. Состояние объекта характеризуется выходной величиной X. В общем случае выходных величин несколько, и тогда состояние объекта характеризуется вектором X, координатами которого являются отдельные выходные величины.
От управляющего устройства на вход объекта поступает управляющее воздействие (управление) U. Помимо управляющего воздействия к объекту приложено также возмущающее воздействие (возмущение, помеха) F, которое изменяет состояние объекта, т. е. X, препятствуя управлению. На вход управляющего устройства подается задающее воздействие (задание) G, содержащее информацию о требуемом значении X, т. е. о цели управления. Переменные U, G и F в общем случае являются векторами, как и X.
ЧУ - чувствительное устройство, ВУ - вычислительное устройство, ИУ - исполнительное устройство.
Чувствительные устройства (измерительные устройства) служат для измерения переменных X, G и F.
Вычислительное устройство реализует алгоритм работы управляющего устройства, соответствующим образом перерабатывая поступающую от чувствительных устройств входную информацию. В простейшем случае оно осуществляет простые математические операции, такие, как операция сравнения, определяющая разность X — G, операции интегрирования, дифференцирования, статического нелинейного преобразования и т. п. В более сложных случаях вычислительное устройство может представлять собой вычислительную машину и даже комплекс таких машин.
Исполнительные устройства предназначены для непосредственного управления объектом, т. с. изменения его состояния в соответствии с сигналом, выдаваемым вычислительным устройством.
Помимо перечисленных выше частей, в состав управляющего устройства могут входить различные специальные устройства, например преобразователи, служащие для согласования отдельных частей системы, устройства связи и т. п.
При решении любой задачи управления необходимо рассматривать объект управления.
Объектом управленияможет быть техническое устройство, технологический процесс или более простая система управления. Состояние объекта управление определяется рядом величин, характеризующих как воздействия на объект внешней среды и управляющих устройств, так и протекание процессов в нутрии объекта.
Внешнее влияние на объект – воздействие.
Воздействие, вырабатываемое управляющим устройством - управляющее воздействие. Воздействие, не зависящее от системы управления –возмущение.
Контролируемые величины, характеризующие состояние объекта, по которым ведётся управление, называется управляемыми (регулируемыми).
Блок схема объекта управления представлена на рисунке:
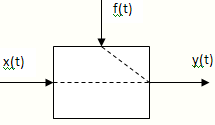 ОУ
– объект управления;
ОУ
– объект управления;
x(t) – управляющее воздействие;
f(t) – возмущение;
y(t) – регулируемые величины.
При изображение системы управления (регулирования) применяются два принципа: функциональный и структурный.
Функциональная схема– блок-схема системы, заданная функциональным назначением элементов.
Структурная схема– блок-схема системы, заданная математическими характеристиками элементов.
Степени и формы автоматизации
1)Частичная степень-охватываются основные участки производственного процесса
2)Комплексная-охватываются все основные участки технологического процесса
3)Полная-охватываются все основные и дополнительные участки технологического процесса
Способы регулирования температуры перегретого пара
1)Предельное отклонение температуры перегретого пара не должна превышать 5%
2)Технологическим
и практическим критерием качества
системы регулирования tпп
является неколебательность переходных
процессов
 .
Значение интегрального критерия:
возмущение нагрузки на 10% от номинальной
не должно превышать 5000 град∙сек.
.
Значение интегрального критерия:
возмущение нагрузки на 10% от номинальной
не должно превышать 5000 град∙сек.
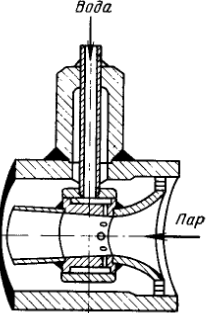
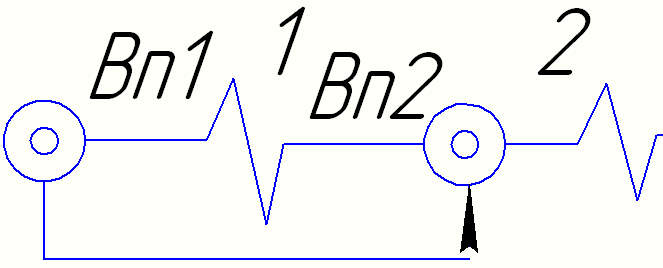
Методы воздействия: 1)смешивание-процесс преобразования пара путем добавления реагента. При смешивании впрыскиваются вода, конденсат, пар с меньшим теплосодержанием, в качестве впрыскивающего реагента –питательная вода при ее высоком качестве, собственный конденсат, конденсат турбины, подаваемый при помощи плунжерных насосов на предыдущей ступени нагрева. При неблагоприятных возмущениях, направленных на возмущение tпп температура металла трубопровода должна быть поддержана на заданном уровне, для этого при помощи регулирующего питательного клапана осуществляется мгновенный впрыск пароохладительного реагента.
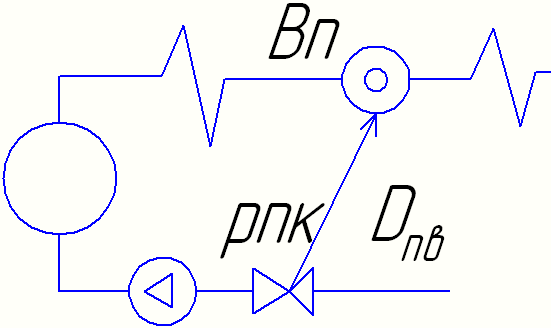
ВП-впрыскивающий пароохладитель; РПК-регулирующий питательный клапан
Впрыск как регулирующее воздействие является одновременно возмущением для системы.
При вводе собственного конденсата система быстрее выходит на заданный уровень. Изменение положения клапана варьируется доля пара пароперегревателя и доля пара, идущие ч/з необогреваемый байпас.
2)Поверхностное охлаждение. Применение этой схемы приводит к снижению экономичности котла, тк питательная вода нагревается выше заданных пределов до поступления в экономайзер.
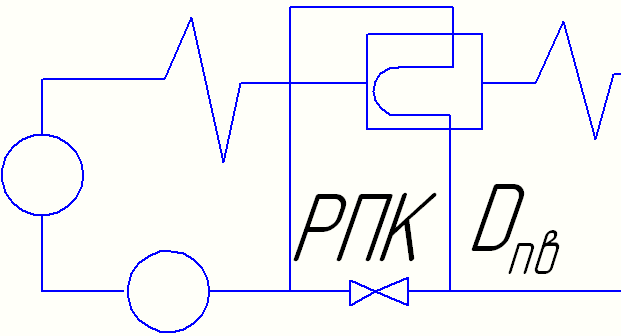
Экономайзер работает с заданными установками и не может реагировать на повышение питательной воды Dпв, это приводит к увеличению tух газов. Недостаток поверхностного охлаждения-сложность применяемых конструктивных элементов, сложность эксплуатации и поддержание заданных показателей и режимов работы.
3)воздействие на тепловосприятие котельного агрегата. Изменение положения факела. Угол поворота горелок, кол-во горелок, ярусность, замена части горелок на устройстве с меньшим Bт изменяет tпп.
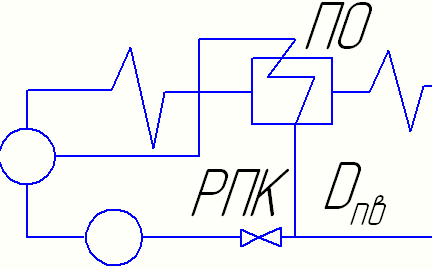
Принципиальная схема регул-ия tпп.
Схема 1 для маломощных котлов, тк для энергетически мощных котлов обладает недостаточными динамическими свойствами, не своевременно реагирует на изменение tпп. На секции пароперегревателей действует мощное возмущение нагрузки потребителя расходом топлива. РУ отрабатывает возмущения инерционно-с запаздыванием по времени (τ), за время τ tпп динамично меняется и в предельном случае может выходить за установленный предел.
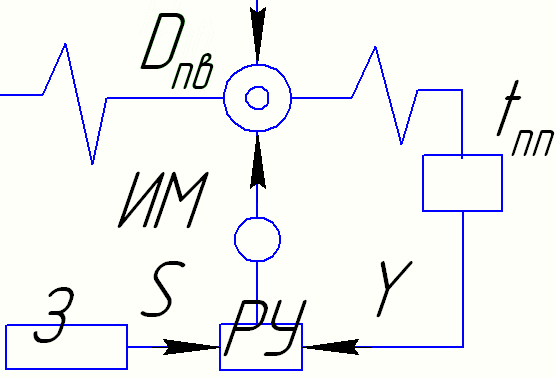
Схема 2 для мощных котлов, в к-ую включена малый инерционный дополнительный канал по скорости нарастания tпп вблизи точки впрыска. В этих случаях применяется каскадная система регулирования –с дополнительным к основным каналам по сигналу задания, при применении диффернцатора РУ мгновенно получает сигнал о текущей скорости нарастания tпп и компенсирует отклонения.
Билет №7
Принципы регулирования и управления
Принципы регулирования и управления
1)По отклонению регулируемой величины. Принцип Ползунова
2)По компенсации возмущений
3)Комбинированный (1+2)
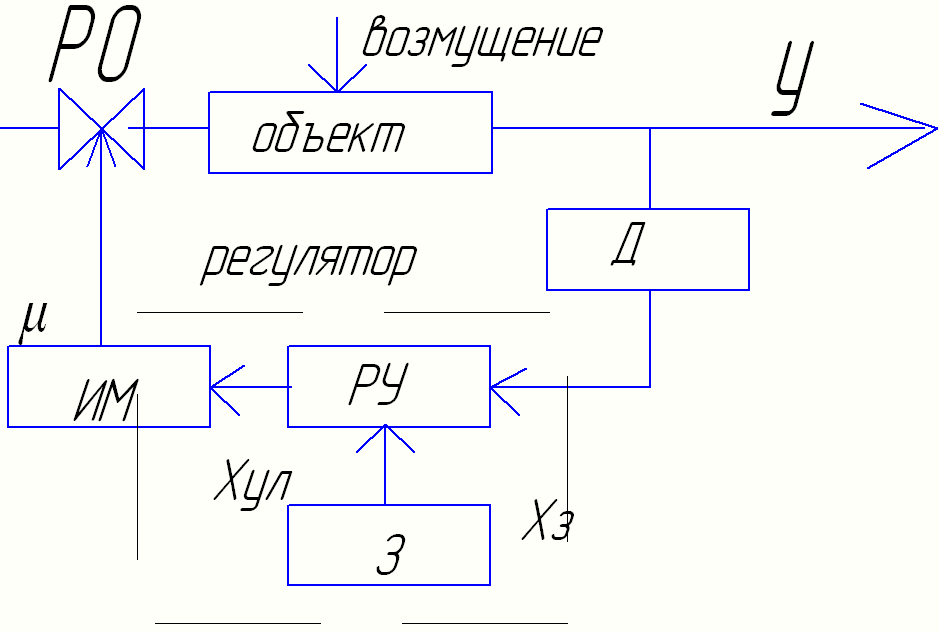
1)По отклонению регулируемой величины
Д-датчик (измеряет регулируемую величину “y”); РУ-регулирующее устройство (выдает управляющее воздействие Xул); З-задатчик (задает сигнал задания Хз); ИМ-исполнительный механизм (непосредственно перемещает регулирующий орган)-отключает или включает прибор; РО-регулирующий орган; Принцип регулирования по отклонению состоит в том, что измеряется регулируемая величина “y”, сравнивается с требуемым значением (задающим воздействием) Xз и выявляющееся при этом отклонение преобразуется в регулирующее воздействие μ. Последнее, влияя на объект регулирования, стремится уменьшить или устранить это отклонение. Достоинство схемы:1)регулируемая величина “у”постоянно находится под контролем; недостаток: регулятор работает, если есть разница
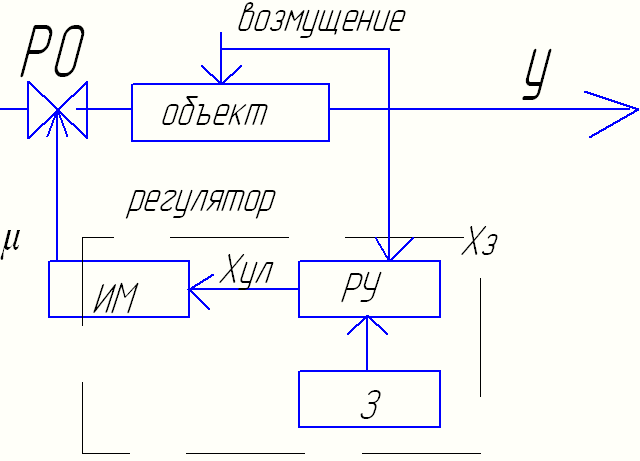
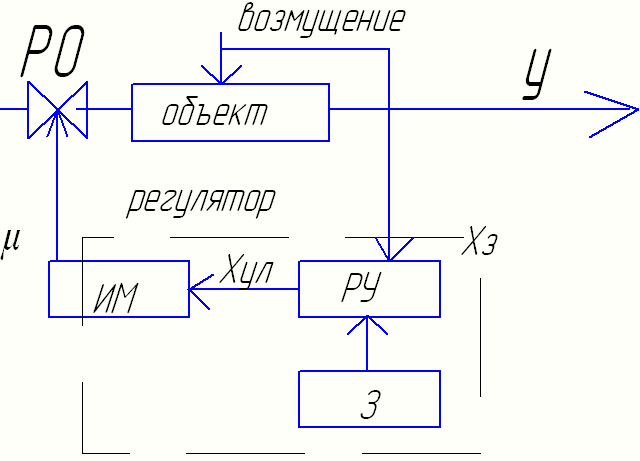
2)По компенсации возмущений
Принцип регулирования по возмущению состоит в том, что для уменьшения или для устранения отклонения регулируемой величины от требуемого значения, вызываемого возмущающим воздействием, это воздействие измеряется с помощью измерительного элемента, преобразуется с помощью РУ и ИМ в регулирующее воздействие μ, которое будучи приложено ко входу объекта регулирования, вызывает компенсирующее отклонение регулируемой величины противоположного знака по сравнению с отклонением, вызываемым возмущающим воздействием. Связь по возмущению регулирующее устройство и исполнительный механизм (ИМ) образуют автоматическое регулирующее устройство- регулятор.
Достоинство принципа по возмущению состоит в том, что возмущающее воздействие может быть устранено до того, как возникает рассогласование. Однако регулятор в таких системах реагирует только на один вид возмущения, поэтому возникает необходимость иметь на одном объекте столько регуляторов, сколько возмущений вызывают отклонение регулируемой величины.
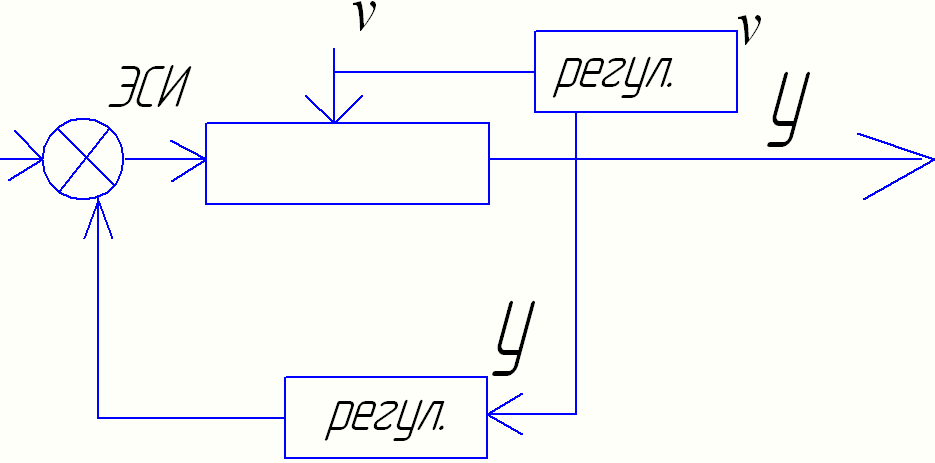
3)Комбинированный (1+2)
В комбинированных системах принцип по отклонению реализуется с помощью главной обратной связи, а принцип регулирования по возмущению - с помощью связи по возмущению.
В комбинированных системах одновременно возможно достижение полной компенсации отклонений, вызываемых основными возмущающими воздействиями, а также уменьшение отклонений, вызываемых второстепенными возмущениями. Первые системы применяют, когда на объект действует 1-2 возмущения. Замкнутые САР - когда на ОР действует большое количество приблизительно одинаковых по величине возмущений. Наконец, комбинированные САР - когда среди большого количества возмущений можно выделить 1-2 максимальных по амплитуде.
Тип 1
Тип 2
ЭСИ-элемент сравнения; ν-регулятор отношения; у-регулятор возмущения
Основные элементы: 1)задатчик-задающий элемент, позволяет устанавливать предписанные значения выходной переменной объекта
2)чувствительный элемент-датчик. Предназначен для измерения физической величины технологического параметра (или ее отклонения)
3)усилительный элемент. Предназначен для усиления сигнала чувствительного элемента
4)исполнительный элемент-механизм, для выдачи управляющего воздействия на объект-привод задвижек
5)преобразовательный элемент-преобразователь, для преобразования сигналов чувствительного элемента в нормируемый
6)корректирующее и стабилизирующее устройство (регуляторы), для изменения характеристик отдельных элементов системы или системы в целом
Аср нагрузки барабанного котла
Для пылеугольных колов регулирование тепловой нагрузки путем косвенного регулирования расхода топлива Вт, основным измеряемым параметром является давление в барабане котла Вт. QT = f(Pб)
 .
1датчик
давления в барабане котла.
.
1датчик
давления в барабане котла.
1)Регулирование по топливу
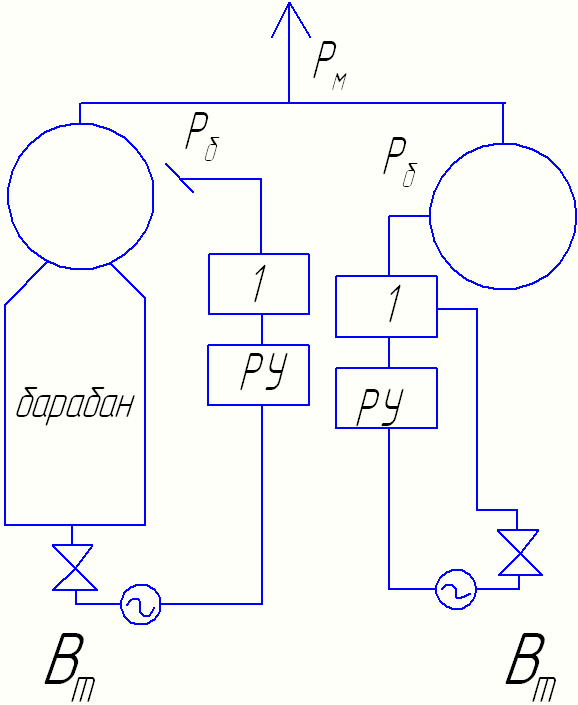
Недостатки схемы: 1) При изменении давления Рм (в магистрали) инерционно меняется давление Рб в каждом котле, поэтому оптимальное перераспределение нагрузки м/ду котлами в данной схеме затрудненно 2)при наличии нескольких котлов инерционность процесса регулирования Рм геометрически вырастает
2)Схема
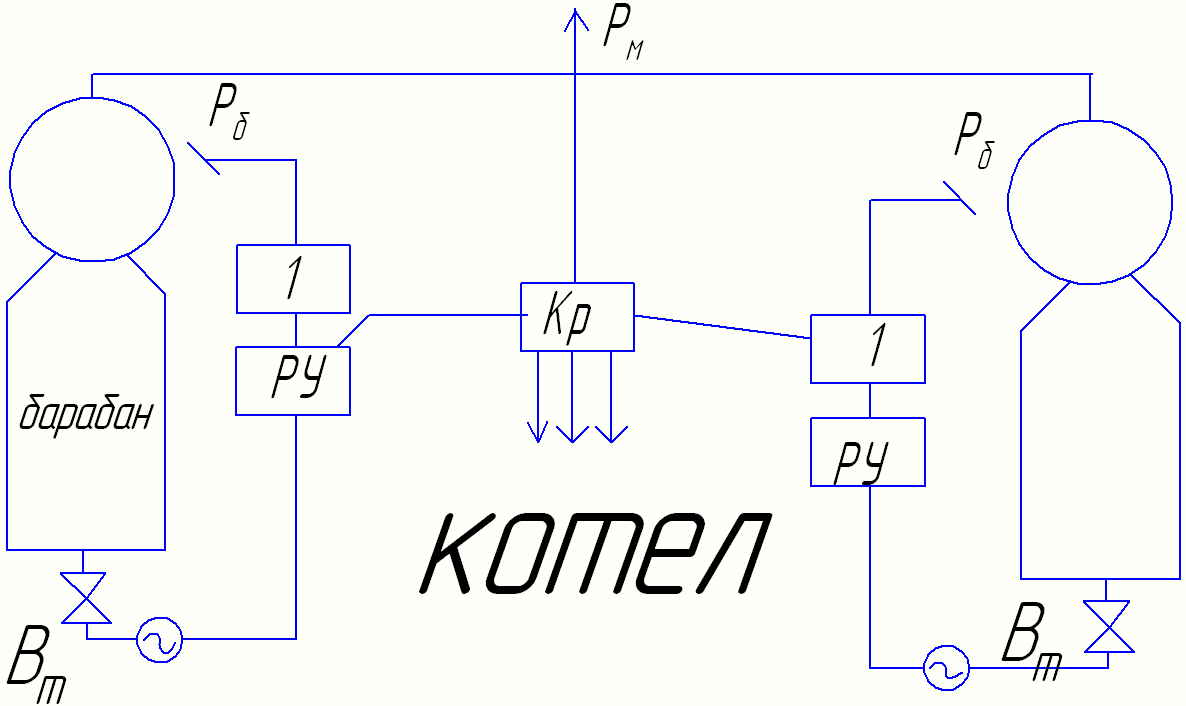
При изменении Рм импульс поступает на входы регулирующих устройств каждого котла, поэтому РУ синхронно отрабатывают поступивший сигнал задания. Основной сигнал-сигнал задания в схемах регулирования тепловых нагрузок Рм. Корректирующий регулятор-устройство, обеспечивающее формирование доп.сигналов по сигналу задания(С,Рм), в Кр испол-ся ПИ-закон регулирования, отличит.особенность Кр от основных регуляторов (РУ)-наличие аналогового выхода по регулированию. Аналоговый выход-поворот плавно(4-20мА; 0-20мА; 0-8мА; 0-10В;)-непрерывное изменение положения исполнительного механизма. Дискретный выход-поворот шагами (пуск/стоп; вкл/откл):1)сухой контакт (регулятор обеспечивает замыкание цепи) 2)потенциал (регулятор обеспечивает замыкание цепи с внутренним питанием)
3)Общая
схема. Сигнал по теплу
 ;
A=const,
зависящая от параметров котла
;
A=const,
зависящая от параметров котла
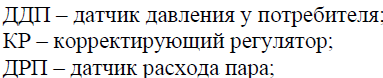
![]()
![]()
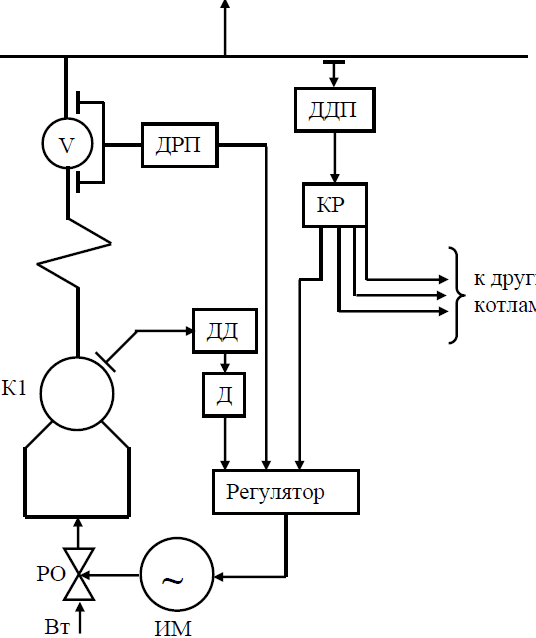
Система регулирования тепловой нагрузки для котлов на жидком топливе и газе.
При уменьшении Рм РУ каждого котла выдает сигнал на увеличение Вт (приоткрывает задвижку), датчик 3 фиксирует увелиение и подает сигнал на РУ, к-ое не отрабатывает это измененниедо получения изменяющегося значения Рм, при поступлении нового значения Рм РУ увеличивает/уменьшает Вт.
Билет №8
1)Классификация автоматических систем. Основные элементы автоматических систем