Статические характеристики автоматических систем
Статические характеристики обычно рассчитываются относительно постоянных внешних воздействий.
Элементы систем могут соединяться параллельно, последовательно или с обратной связью.
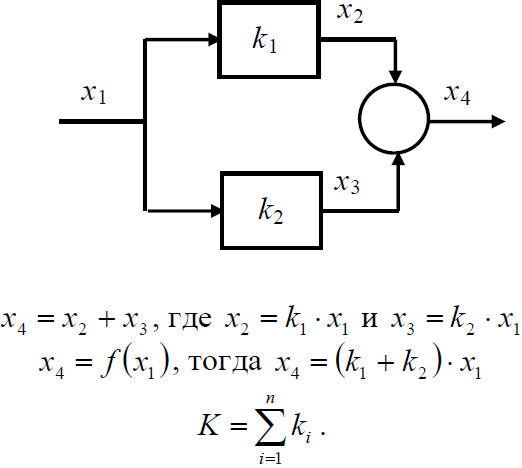
Соединение элементов называется параллельным, если на их входы одна и та же переменная, а выходные переменные всех элементов складываются.
Соединение элементов называется последовательным, если выходная переменная каждого предыдущего элемента является входной каждого последующего элемента.
Последовательное соединение:

Последовательное соединение:
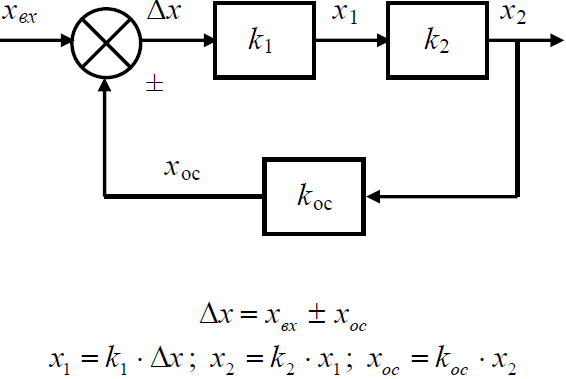
Если сигнал обратной связи, подаваемый на вход системы пропорционален только значению выходной переменной, то обратная связь называется жесткой.
Если же сигнал появляется не только при изменении выходной переменной, но и ее производных, то обратная связь называется гибкой.
![]()
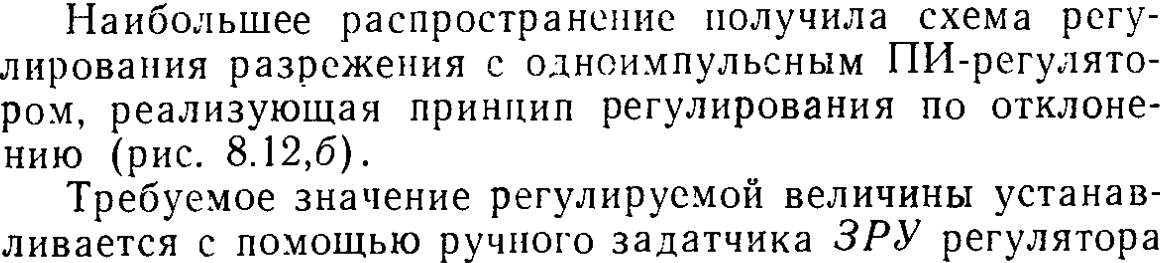
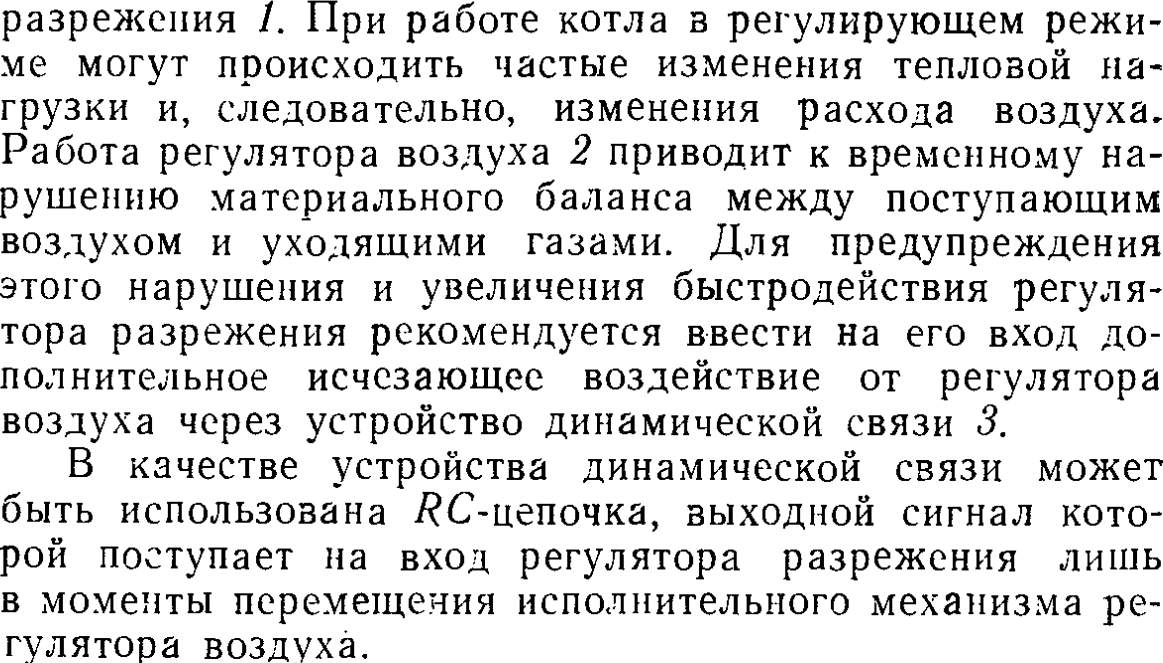
2)Аср разряжения прямоточного котла
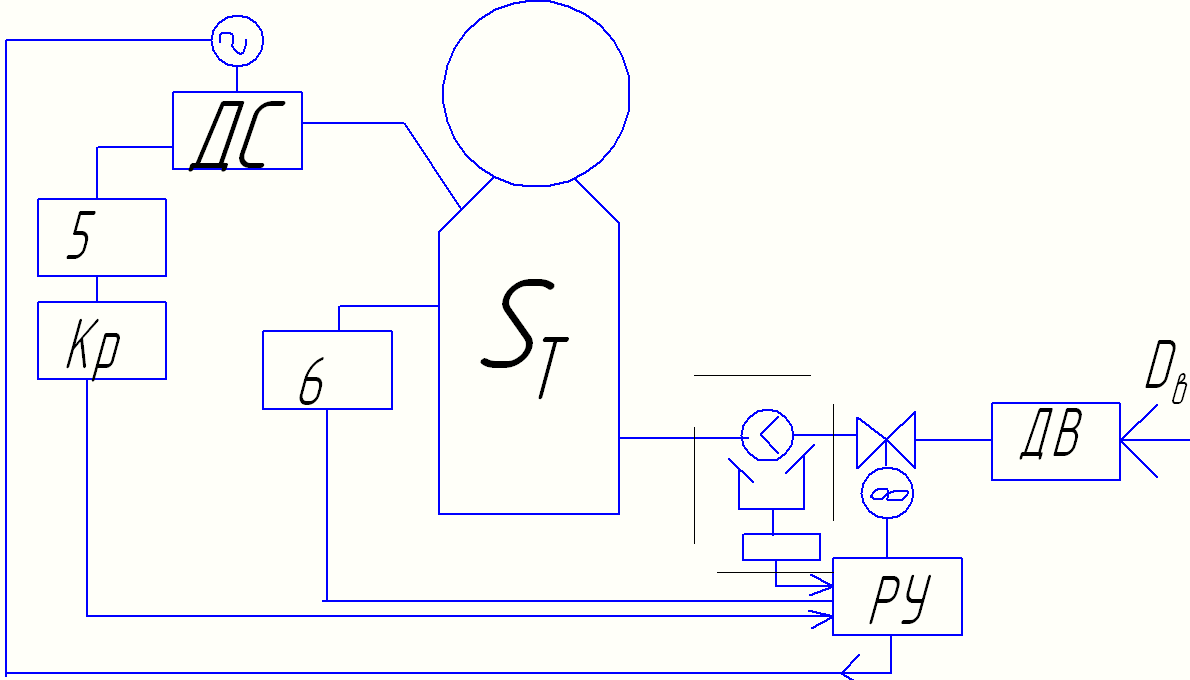
Регулирование разряжение выполняется для поддержания материального баланса, уменьшение разряжение Sт приводит к выдуванию дымовых газов в котельном помещении. Увеличение Sт приводит к возрастанию расхода холодного воздуха в топку, как следствие, падает кпд, тк котел обладает малым запаздыванием и стационарностью, то для регулирования Sт используем любой тип регулятора П, И, ПИ. Сигнал Sт-пульсирующий относительно среднего значения, при его регулировании требуется сглаживание сигналов.
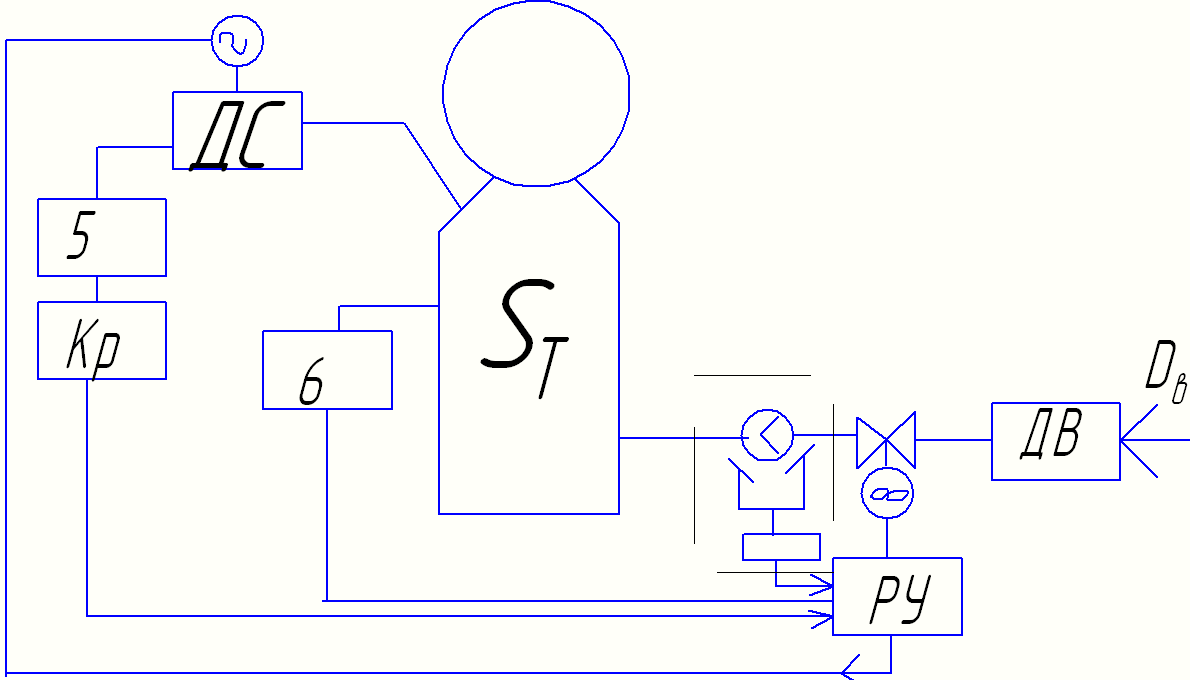
6-датчик разряжения в верхней части топки котла. Наиболее сложно возмущающем воздействием на Sт является расход воздуха (расход Вт), тк расход воздуха Вв зависит от расхода топлива Вт, можно рассматривать как единый сигнал возмущений. Для ликвидации возмущений, вызванных Вт: 1)установка дополнительных датчиков расхода 2)выдача компенсирующих воздействий с дополнительных КР

Билет №11
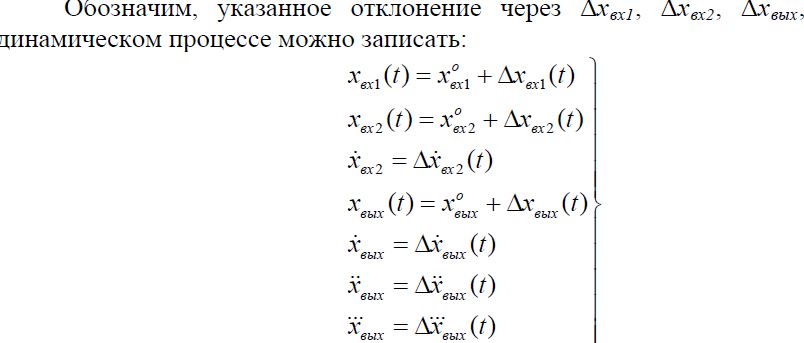
1)Управление динамическими режимами системы автоматического управления (сау). Составление уравнений динамики сау
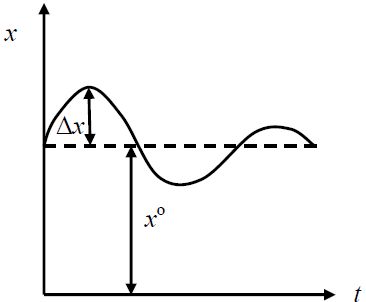
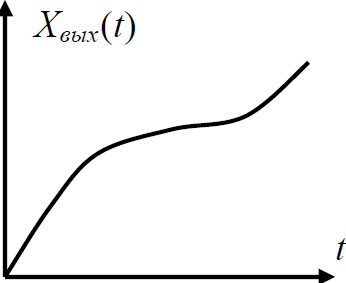
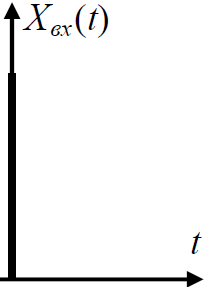
Для элементов автоматики основным является режим работы, при котором Хвхи Хвыхне остаются постоянными. Такой режим работы называетсядинамическим.
Уравнение динамики элемента (звена), ур-ие опред-ие зависимость выходной величины элемента (звена) Хвых(t), от входной величины Хвх(t). Хвых(t)=f [Хвх(t)]
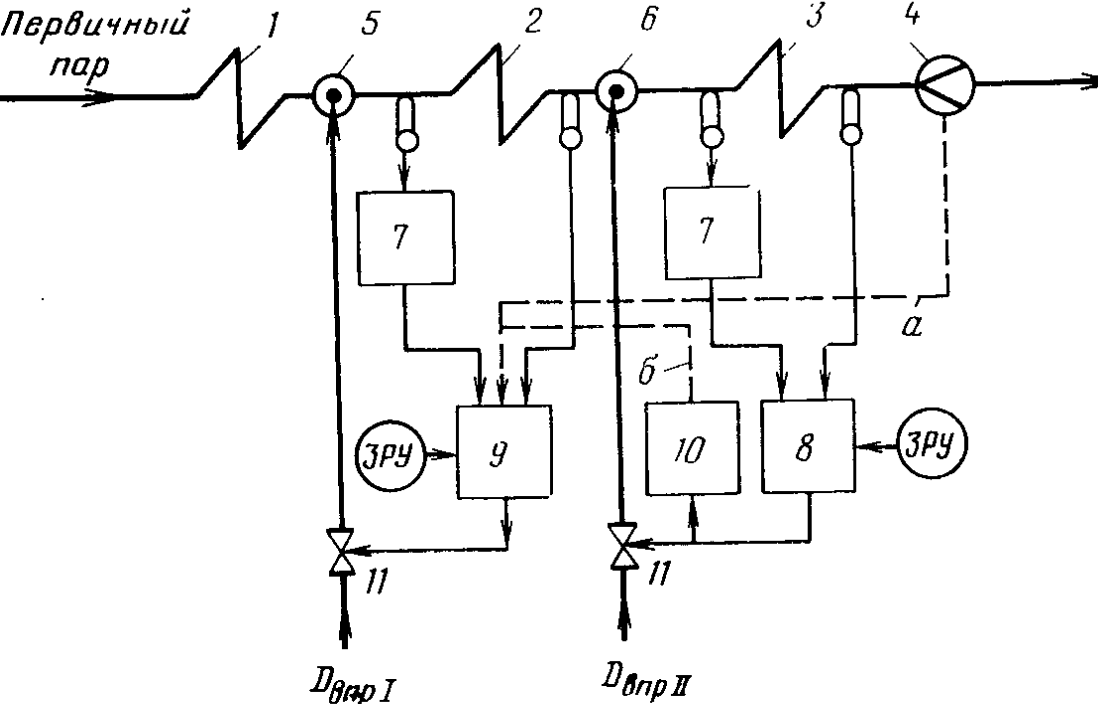
2)аср температуры первичного перегретого пара прямоточного котла


Билет №12
1)Преобразование Лапласа. Форма записи дифференциальных уравнений системы автоматического управления



 Прямое
преобразование Лапласа
Прямое
преобразование Лапласа
 Обратное
преобразование Лапласа
Обратное
преобразование Лапласа
![]()
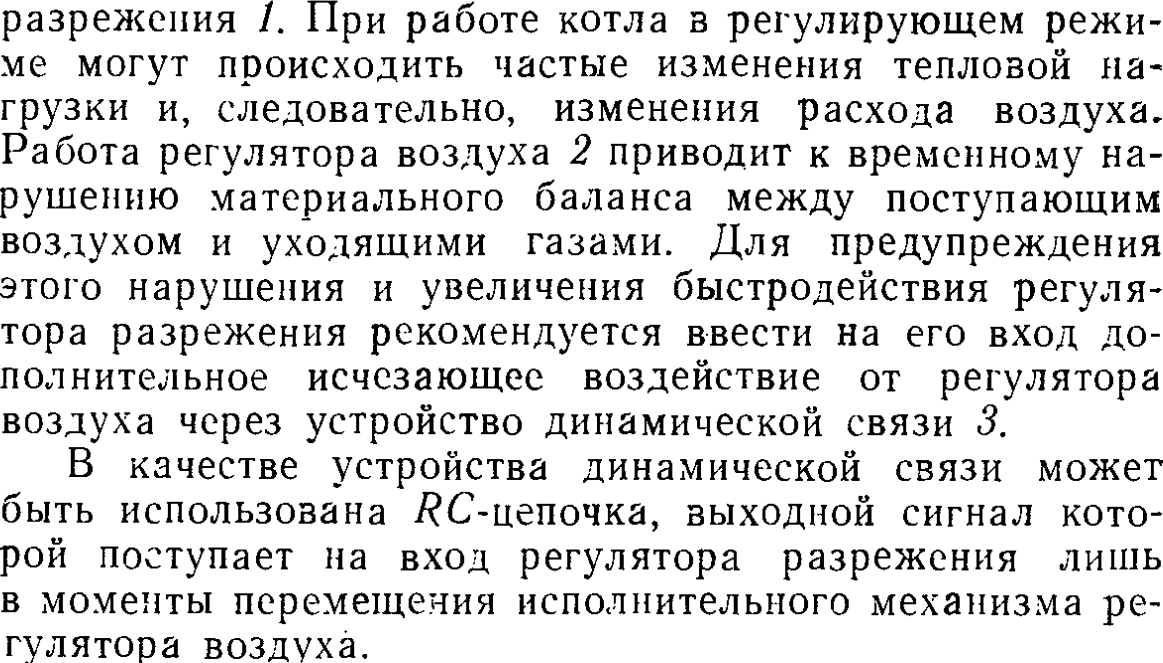
Передаточная функция. В теории управления часто используют символическую операторную форму записи дифференциальных уравнений. При этом вводится понятие алгебраизированного оператора дифференцирования p = d/dt так, что, dy/dt = py, а pn= dn/dtn. Это лишь другое сокращенное обозначение операции дифференцирования. Соответственно, операция интегрирования записывается как 1/p. В операторной форме исходное дифференциальное уравнение записывается как алгебраическое:
a0p(n)y+a1p(n-1)y+...+any = (a0p(n)+a1p(n-1)+...+ an)y = (b0p(m)+...+bm-1p+bm)u.
Не надо путать эту форму записи с операционным исчислением. Здесь используются непосредственно функции y(t), u(t) (оригиналы), а не их изображения Y(p), U(p), получаемые из оригиналов преобразованием Лапласа. При нулевых начальных условиях с точностью до обозначений записи действительно похожи, и некоторые правила операционного исчисления применимы к операторной форме записи уравнений динамики. Так, оператор р можно выносить за скобки и можно рассматривать в качестве сомножителя, но без права перестановки: py ≠ yp. Условно можно считать оператор р алгебраической величиной.
Уравнение динамики в операторной форме:
![]()
Дифференциальный оператор W(p) называют передаточной функцией. Она определяет зависимость отношения выходной величины звена к входной во времени: W(p) = y(t)/u(t), т.е. динамический коэффициент усиления. Передаточные функции в операторной форме также представляют собой сокращенную символическую запись дифференциальных уравнений. В установившемся режиме d/dt = 0, p = 0, и передаточная функция превращается в коэффициент передачи звена K = bm/an.
Знаменатель передаточной функции D(p) = a0pn+a1pn-1+a2pn-2+...+anназываютхарактеристическим полиномом. Его корни, при которых знаменатель D(p) обращается в ноль, а W(p) стремится к бесконечности, называются полюсами передаточной функцией.
Числитель K(p) = b0pm+b1pm-1+...+bmназываютоператорным коэффициентом передачи. Его корни, при K(p) = 0 и W(p) = 0, называются нулями передаточной функции.
Звено системы с известной передаточной функцией называют динамическимзвеном. Под динамическим звеном понимают устройство любого физического вида и конструктивного оформления, описываемое определенным дифференциальным уравнением. На схемах динамическое звено изображают прямоугольником, внутри которого записывается выражение передаточной функции. Для звена с двумя входами и одним выходом (рис. 2.4.3) должны быть записаны передаточные функции по каждому из входов. Передаточная функция является основной характеристикой звена, из которой можно получить все остальные характеристики. Она определяется только параметрами системы и не зависит от входных и выходных величин. Например, одним из динамических звеньев является интегратор. Его передаточная функция Wи(p) = 1/p. Схема системы, составленная из динамических звеньев, называетсяструктурной.
Решение дифференциальных уравнений высоких порядков представляет известные трудности, поэтому сделаны попытки упростить, решение дифференциальных уравнений. Для этого применяют операторный метод, основанный на преобразовании Лапласа.
Смысл преобразования Лапласа заключается в том, что функции действительного переменного х(t) ставится в соответствие функция комплексного переменногоx(p), т.е.
x(t)![]() x(p),
гдеx(t)-
оригинал;x(p)-
изображение.
x(p),
гдеx(t)-
оригинал;x(p)-
изображение.
Операция преобразования записывается так: L{x(t)}=x(p).
Соответствие
выражается интегралом Лапласа:
Таким образом, с помощью этого интеграла можно от функции x(t) перейти к функции (p).
Для того, чтобы записать дифференциальное уравнение в операторной форме, найдем преобразование производной:
L {x'(t)} = ?

Воспользуемся формулой интегрирования по частям:

По формуле интегрирования по частям:
U = e-pt; dV = x’(t)dt;
dU = -pe-ptdt; V = x(t),
тогда

 начальные
условия, которые будем считать нулевыми.
начальные
условия, которые будем считать нулевыми.
При нулевых начальных условиях справедливо утверждение:
Дифференцированию оригинала соответствует умножение изображения на оператор p:
![]()
Это свойство Лапласа позволяет свести дифференциальное уравнение к алгебраическому и ввести понятие передаточной функции линейного элемента (системы):
αnpnyвых(p) + αn-1pn-1yвых(p) + …. + α1pyвых(p) + α0yвых(p)=bmpmxвх(p) + …. + b1pxвх(p) + +b0x(p)
Далее уравнение решается как обыкновенное алгебраическое:

Операции нахождения оригинала выходной величины по изображению, называется обратным преобразованием Лапласа:

Обратное преобразование совершается с помощью следующего интеграла:

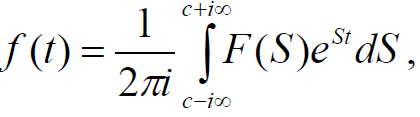
Для облегчения задачи нахождения оригинала по изображению созданы таблицы преобразования Лапласа, позволяющие не решая интеграла, находить оригинал по изображению и обратно.
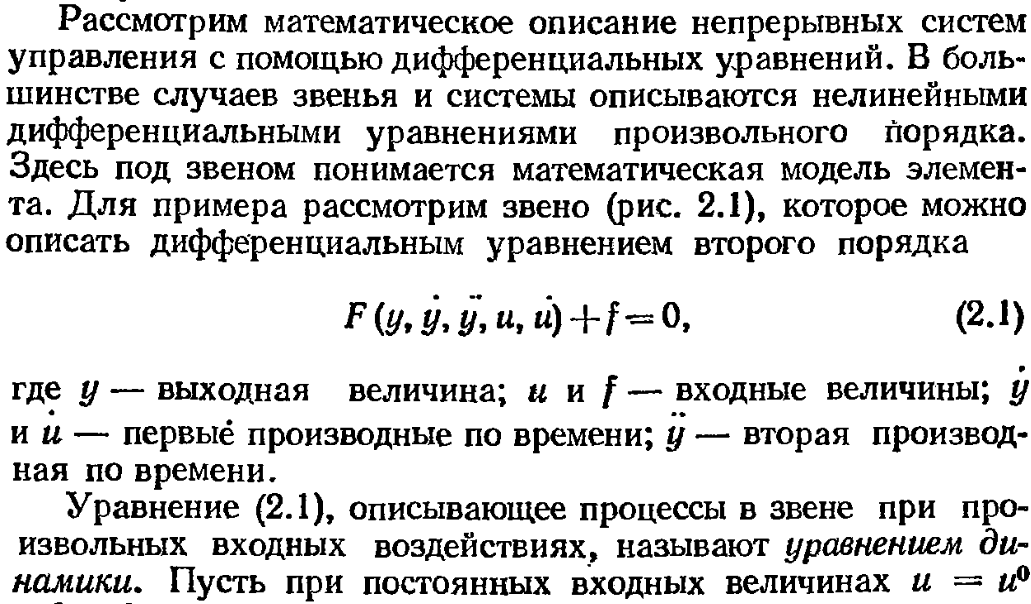
2)аср разряжения барабанного котла
Регулирование разряжение выполняется для поддержания материального баланса, уменьшение разряжение Sт приводит к выдуванию дымовых газов в котельном помещении. Увеличение Sт приводит к возрастанию расхода холодного воздуха в топку, как следствие, падает кпд, тк котел обладает малым запаздыванием и стационарностью, то для регулирования Sт используем любой тип регулятора П, И, ПИ. Сигнал Sт-пульсирующий относительно среднего значения, при его регулировании требуется сглаживание сигналов.
6-датчик разряжения в верхней части топки котла. Наиболее сложно возмущающем воздействием на Sт является расход воздуха (расход Вт), тк расход воздуха Вв зависит от расхода топлива Вт, можно рассматривать как единый сигнал возмущений. Для ликвидации возмущений, вызванных Вт: 1)установка дополнительных датчиков расхода 2)выдача компенсирующих воздействий с дополнительных КР
Билет №13
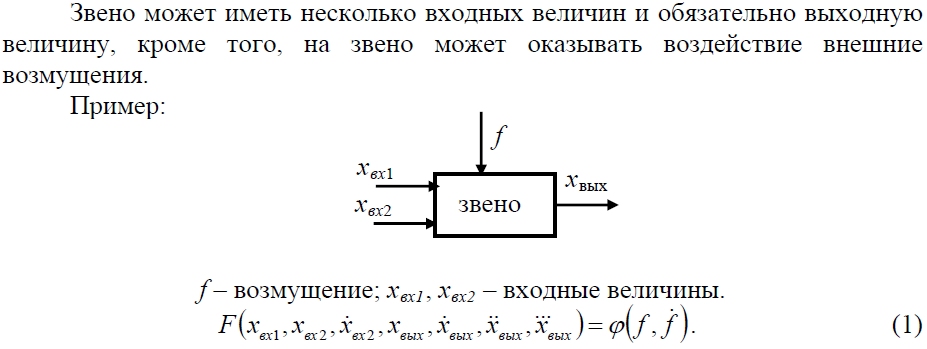
1)Временные характеристики системы автоматического управления (сау). Методы решения уравнений динамики сау

Переходная ф-ия h(t)-ф-ия, описывающая реакцию системы (звена) на единичное ступенчатое воздействие при нулевых начальных условиях.



Методы решения уравнений динамики сау















![]()
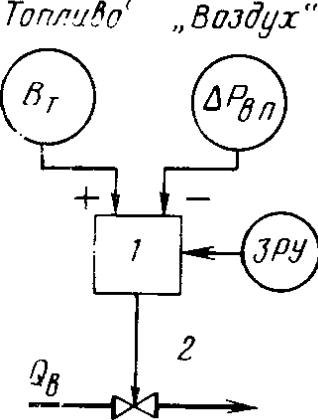
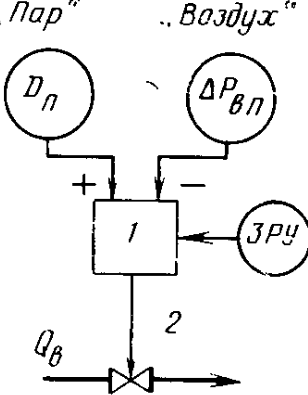
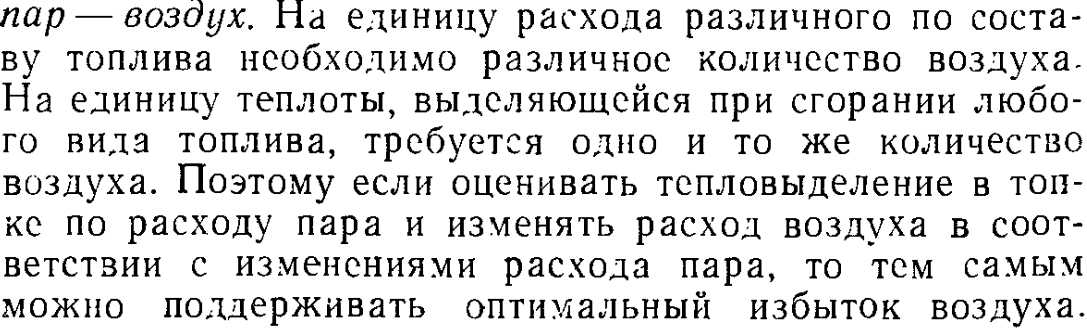
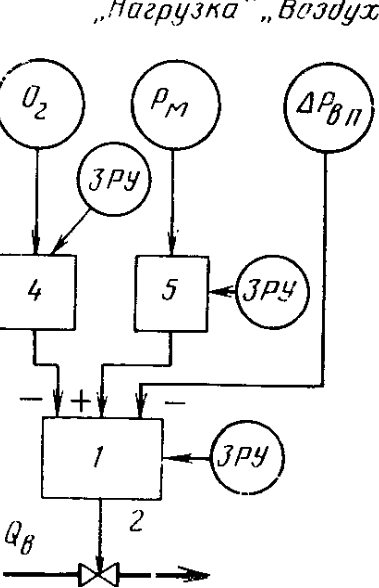
2)аср воздуха барабанного котла


Билет №14
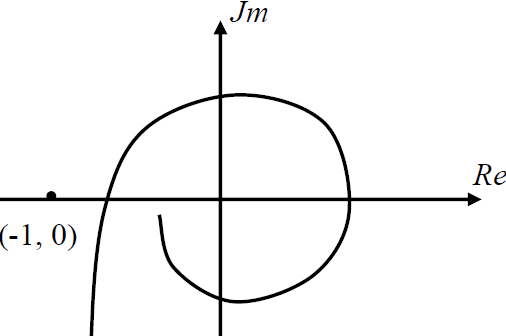
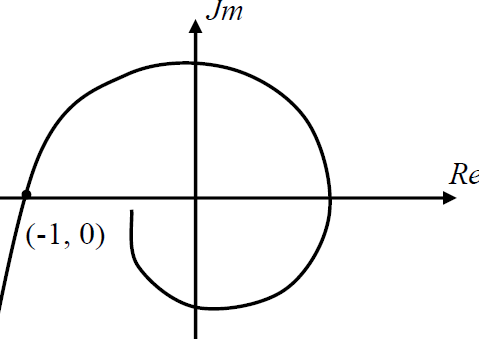
1)Частотные характеристики звена, системы
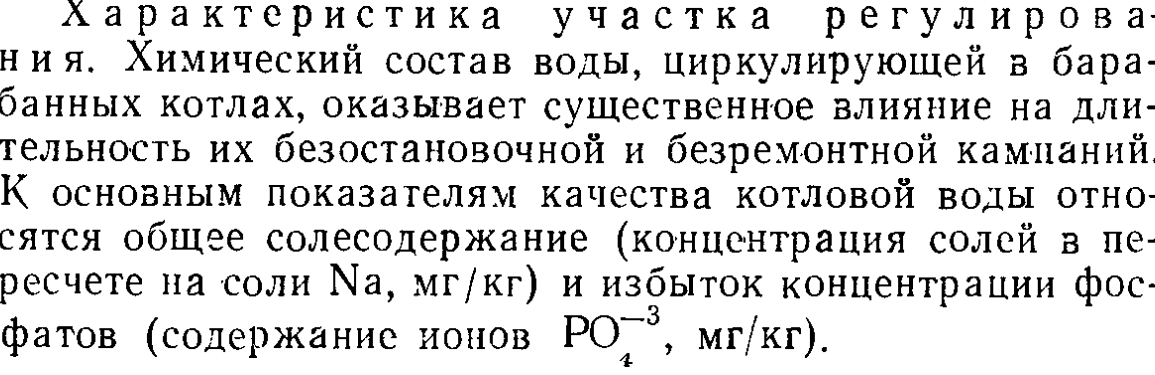
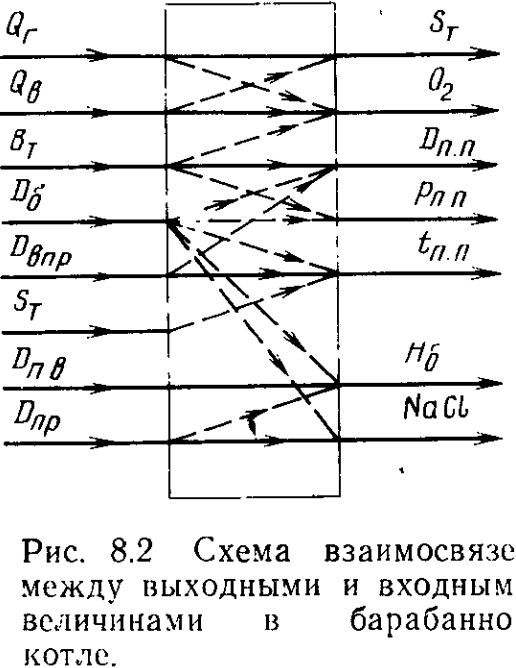
2)характеристика барабанного котла как объекта регулирования. Взаимосвязь входных и выходных параметров в барабанном котле. Перечень аср барабанного котла





Билет №15
1)Типовые звенья системы автоматического управления и их характеристики
2)аср качества котловой воды барабанного котла