

1.
Цели и задачи дисциплин ТАУ
Ц.и З.:изучение задач и принципы и методология постановления систем,закономерностей,протекающих в них процессов,основ синтеза СУ современными тех.системами.Знать основы мат.моделирования динам. систем,методы и алгоритм анализа/синтеза САУ.Инженерные методики анализа соврм.САУ.Средства и алгоритм автомотического моделирования и проектирования.
Историческая справка о развитии АУ.
1765-Ползунов-автоматическое регул. уровня воды в котле паровой машины.
1784-Регулирование скорости паровой машины
1809-Жаккер-програм-е управ-е ткацким станком при помощи перфокарты
1830-Пуанселе-примени принцип регул-я возмущения
Теоретические работы в области ТАУ:
1868-Максвелл-книга о регуляторах
1876-Вишнеградский-труд о регулирование прямого действия
1874-разработан Алгебраический критерий Раус
1895-Алгебраич критерий устойчивости Гурвица
1892-Лапунов-общ.задача об устойчивости движения
Основы классической теории АУ:
1932-Найквист-книга теория регенерации
1936-Михайлов-критерий устойчивости
1948-В.В. Солодовников частотный метод анализа и синтеза САУрегулирования
Современные ученые :
Пугачев, Фельдбаум, Трапезников, Лурье
2. Основные понятия тау:
Объект управления -объект,для достижения жел.резу-та функционир-я,которого необходимо и допустимы спец. организованные. воздействия
Объект-выделенная по некоторым правилам часть мира,явл предметом познания практической дечтельности,
Воздействие- влияние одного объекта на другой,выз. в последнем изменение его свойств и состояния
Выход координаты ОУ-количественно определяют качество хода процесса регулированияъ
Управляющее воздействие-возд. на оъект управления ,для достижения цели управления.
Цель управления- значение,соотношение значений координат в ОУили их изменений во времени, при кот. обеспечивается достижение жел. результатов функционирования ОУ
Входные параметры –могут измен. вых. координату ОУ как и управ. возд-я,однако в процессе исслед-я. свойств ОУ,считают, что они оста-ся не изменными поэтому при мат. описании объекта ,они могут быть представлены как коэфиценты.
Параметры Объетка- величина,характер. сво-ва объекта,значения кот. определяются по количественной шкале
Возмущение-воздейтвия из вне на люб-й элемент САУ включая ОУ,кот. затрудняют достижение цели управления-ими могут быть параметры или отклонения от параметров тех. процессов влияющие на величину выходной координаты и произвольнл меняющиеся в ходе тех. проц. –егом часто бывает невозможно контролировать и даже измерить. Конпенсация действия возмущения часто бывает целью АР управления воздействия
Регулирование- управление, цель кот. заключается в обеспечении. близости текущ. значения одной или нескольких координат ОУ к их заданному значению
Управление-процесс выработки осуществления управ-х воздействий ,кот. включают в себя передачу и обработку необход. информации ,принятие решения, определение величины управляющего воздействия.-кот. включает в себя:передачу упр. возд-я и при неоход. преобразование его в форму непосредственно воспринимаемую ОУ
Многомерный ОУ- такой ОУ матем. модель функционирования кот. содержит несколько управляющих и/или несколько выходных координат.
Одномерный ОУ-имеет одну вых. координату и один вход. параметр.
Тех. система-совокупность и аппаратов, выполняемых то или иной технологический процесс
Технологический процесс-порядок и правила действия по созданию продукции или изделия
Автоматическое управление-упр. без участия человека
Автоматизированное управление-где система автом. управ. автоматически конпенсирует действия возмущения стабилизирует вых. координату с заданной точностью
Алгоритм функционирования-совокупность правил и законов определ-х ход тех. процессов или работы САР
Алгоритм управления- совокупность правил и законов по кот. осуществляется управл. воздействие
Регулятор-устройство,которое осуществляет управляющее воздействие и действует непосредственно на ОУ
Управляющий орган(исполнительный)- устройство кот. изменяет упр. воздействие и действует непосредственно на ОУ.
САУ-такая системе,кот. без участия человека реализует алгоритм функционирования
САР- такая система,кот. осущ. действия возмущения,поддерживая заданное значение вых. координаты с заданной точностью
2) Функциональная схема в ТАУ используется в построении структурной схемы. На этой схеме выполняется ход сигналы упр. и элементы зи кот строится САУ. (Не охвачена ЕСКД и не является элементом рабочей документации, выполняется в виде рисунка)
Одним из этапов анализа и синтеза САР является разработка функциональной схемы. За основу берется схема электрическая схема принципиальная.
ТГ вкл в схему т.о. что осуществляется гальваническое суммирование напр. тахогенератора Етг . Этот гальв сумматор осущ вычитание , т.к. напр. задание и Етг вкл встречно.
В уст. режимах напр. задания всегда больше Етг.
На ФС нет электрических цепей. Стрелки указывают соед элементов между собой и напр. входа сигнала управления.
На ФС количество блоков может быть избыточным.Сигнал управления может проходить не через все элементы, поэтому для построения СС САР используются только те элементы, через кот. проходит сигнал управления.
3. 1)принцип разомкнутого управления. Сущность принципа состоит в том, что алгоритм управления строится только на заданном алгоритме функционирования и не контролируется по фактическому значению выходной величины.
![]() ЗАФ-
заданный алгоритм функционирования
ЗАФ-
заданный алгоритм функционирования
УУ- устройство управления
ОУ- объект управления
u- входное управляющее воздействие
f- возмущающее воздействие
x- выходная величина
2)принцип обратной связи- управление по отклонению
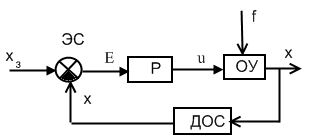 Р-
регулятор
Р-
регулятор
ДОС- датчик обратной связи
Хз- заданное значение управляющей величины
![]() -элемент сравнения
-элемент сравнения
Р-регулятор

Управляющее
воздействие является функцией отклонения
 выходной
величины х от её заданного значения.
Функцияf
должна быть неубывающей ф-ей и одного
знака с
выходной
величины х от её заданного значения.
Функцияf
должна быть неубывающей ф-ей и одного
знака с
 .
.
Ф-я f называется регулированием по отклонению. Устройство управления в данном случае называют автоматическим регулятором. Объект управления называют объектом регулирования. Вся система называется системой автоматического регулирования.
Регулятор- вырабатывающий воздействие и в соответствии с алгоритмом управления по отношения к объекту образует отрицательную обратную связь.
 -отклонение
(ошибка управления).
-отклонение
(ошибка управления).
3)принцип компенсации (регулирования по возмущению).

![]() Д-
датчик измерения возмущающего воздействия
Д-
датчик измерения возмущающего воздействия
Р- регулятор возмущения
Д-датчик измерения возмущающего воздействия
Отклонение
регулируемой величины зависит как от
управляющей величины u,
так и от возмущения f.
Тогда закон управления F2
м. сформулировать таким образом, чтобы
в установившемся режиме отклонение
отсутствовало

Самым эффективным принципом управления является управление по возмущению, но обладает след. недостатками- трудность измерения возмущ. воздействий. на практике используют комбинированное управление, т.е. те возмущения, к-е м. компенсировать упр-ся по принципу компенсации, а остальные по принципу обратной связи.