

20. Анализ ошибок системы при различных законах изменения задающего воздействия.
1) Рассмотрим типы систем управления в зависимости от вида передаточной функции разомкнутой системы, которая в общем виде имеет вид

В зависимости от значений коэффициентов
![]() системы делятся:
системы делятся:
1. Статические системы управления![]()
 .
.
Данная система имеет статическую
характеристику
![]()
2. Система с астатизмом первого
порядка![]()

![]() данная характеристика определяет
зависимость скорости изменения выходной
переменной от величины входной переменной
данная характеристика определяет
зависимость скорости изменения выходной
переменной от величины входной переменной
![]() -
добротность системы по скорости.
-
добротность системы по скорости.
3. Система с астатизмом второго
порядка![]()

![]() данная характеристика определяет
зависимость ускорения изменения выходной
переменной от величины входной переменной
данная характеристика определяет
зависимость ускорения изменения выходной
переменной от величины входной переменной
![]() -
добротность системы по ускорению.
-
добротность системы по ускорению.
2) Ошибки при различных законах изменения задающего и возмущающего воздействия.
Ошибка системы определяется передаточными
функциями замкнутой системы управления
по задающему и возмущающему воздействиям
![]()
На основании теоремы о предельных значениях преобразования Лапласа можно определить значение функции времени после окончания переходного процесса по выражению
![]()
![]()
Рассмотрим случай 1.Задающее в возмущающее воздействия являются постоянными значениями
![]()
Находим преобразования Лапласа
![]()
Ошибка для статической системы

Статическая система отрабатывает
влияние постоянных задающего и
возмущающего воздействий с ошибкой,
уменьшая их влияние в
![]() раз.
раз.
Ошибка для астатической системы
Астатическая система отрабатывает постоянные задающее в возмущающее воздействия с нулевой остаточной ошибкой.
Рассмотрим случай 2.Задающее в
возмущающее воздействия изменяются с
постоянными скоростями![]()
Находим преобразования Лапласа
![]()
Ошибка для статической системы

Ошибка статической системы при линейно изменяющихся задающем и возмущающем воздействиях стремится к бесконечному возрастанию.
Ошибка для астатической системы

При линейном возмущении астатическая система имеет остаточную ошибку.
Ошибка для системы с астатизмом второго порядка

Система с астатизмом второго порядка отрабатывает линейные воздействия с нулевой ошибкой.
19. Методы разработки систем управления.
Методика синтеза систем управления обычно сводятся к одной из двух задач.
Задача 1.Синтез системы с заданной структурой. Это означает, что проанализирован технологический процесс как объект управления, выбраны управляемые параметры и управляющее воздействие, исследованы характеристики возмущающих воздействий. разработана структура системы, выбраны элементы, найдены передаточные функции всех элементов, кроме корректирующего устройства или регулятора. Задача заключается в нахождении оптимальных значений параметров корректирующих устройств. Если полученные показатели качества системы не удовлетворяют исходным данным, то производится разработка новой структуры системы управления.
Методом решения задачи нахождения оптимальных параметров элементов системы управления является метод нелинейного программирования. Это метод численного решения задач оптимизации, он позволяет найти численные значения параметров регулятора, фильтра и других элементов системы, обеспечивающих экстремальное значение критерия решения задачи.
Задача 2. Синтез системы управления с незаданной структурой. При решении данной задачи структура регулятора получается в процессе синтеза системы управления. При разработке системы данным способом используются методы оптимизации – метод аналитического синтеза регуляторов, вариационное исчисление, метод динамического программирования, принцип максимума Понтрягина, методы синтеза систем управления при стохастических воздействиях.
Одним из основных методов синтеза систем управления является метод математического моделирования.Он позволяет определить работоспособность системы, выделить области устойчивости по параметрам регулятора, найти оптимальные оценки параметров системы при детерминированных и стохастических возмущениях, проанализировать область эффективной работы системы с отрицательной обратной связью.
ПИД регулятор, его составляющие
П
 ропорционально-интегрально-дифференциальный
регулятор (ПИД – регулятор) является
типовым промышленным корректирующим
устройством, которое вставляется в
промышленные системы регулирования. В
таком случае его удобно рассматривать
как управляющее устройство, служащее
для расчета управляющего воздействия,
которое затем усиливается по мощности
и подается на исполнительный механизм
объекта управления.
ропорционально-интегрально-дифференциальный
регулятор (ПИД – регулятор) является
типовым промышленным корректирующим
устройством, которое вставляется в
промышленные системы регулирования. В
таком случае его удобно рассматривать
как управляющее устройство, служащее
для расчета управляющего воздействия,
которое затем усиливается по мощности
и подается на исполнительный механизм
объекта управления.
Регуляторы обычно не рассчитываются,
а настраиваются на конкретные процессы
специалистами по автоматизации. При
этом для формализации методов настройки
его удобно рассматривать в виде трех
параллельно включенных компонент:
пропорциональную, интегральную и
дифференциальную (см. рис ). Передаточная
функция регулятора имеет вид
![]()
Для отдельных объектов достаточно использовать пропорциональную составляющую, пропорционально-интегральную составляющую. Поэтому, кроме ПИД промышленностью выпускаются пропорциональные регуляторы (П-регуляторы) и пропорционально – интегральные регуляторы (ПИ-регуляторы).
П-регулятор.Управляющее воздействие
П-регулятора пропорционально отклонению
регулируемой величины от заданного
значения![]()
![]()
П-регулятор имеет два настраиваемых параметра:
![]() - коэффициент пропорциональной
составляющей,
- коэффициент пропорциональной
составляющей,
![]() –
контрольная точка - значение управляющего
воздействия при равенстве регулируемой
переменной заданному значению (при
нулевой ошибке системы).
–
контрольная точка - значение управляющего
воздействия при равенстве регулируемой
переменной заданному значению (при
нулевой ошибке системы).
П-регуляторы позволяют управлять работой практически всех промышленных объектов, однако при статическом объекте управления общая разомкнутая система является статической и такие системы имеют остаточную ошибку, которая равна
![]()
где:
![]() -
установившаяся ошибка системы без
регулятора при постоянном задающем или
возмущающем воздействии.
-
установившаяся ошибка системы без
регулятора при постоянном задающем или
возмущающем воздействии.
![]() -
установившаяся ошибка системы с
регулятором при постоянном задающем
или возмущающем воздействии.
-
установившаяся ошибка системы с
регулятором при постоянном задающем
или возмущающем воздействии.
k-коэффициент передачи разомкнутой системы в установившемся состоянии.
Р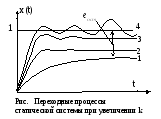 ассмотрим
переходные процессы статической системы
с П-регулятором при единичном задающем
воздействии. При малом значении
коэффициента регулятора переходной
процесс 1 является экспоненциальным и
имеет большую остаточную ошибку
регулирования
ассмотрим
переходные процессы статической системы
с П-регулятором при единичном задающем
воздействии. При малом значении
коэффициента регулятора переходной
процесс 1 является экспоненциальным и
имеет большую остаточную ошибку
регулирования![]() .
.
При увеличении коэффициента усиления
остаточная ошибка уменьшается, но в
переходном процессе появляется
колебательная составляющая (кривая 2).
При дальнейшем увеличении коэффициента
усиления ошибка уменьшается и увеличивается
степень колебательности (кривая 3). При
коэффициенте усиления, превышающем
какое то предельно допустимое значение
![]() система становится неустойчивой,
переходной процесс колебательный
расходящийся, система не приходит в
заданное значение (кривая 4).
система становится неустойчивой,
переходной процесс колебательный
расходящийся, система не приходит в
заданное значение (кривая 4).
Для изучения влияния коэффициента
пропорциональной составляющей регулятора
рассмотрим амплитудную фазовую частотную
характеристику астатической разомкнутой
системы управления. Пусть АФЧХ разомкнутой
системы третьего порядка при
![]() имеет вид кривой 1, показанной на рис.
. АФЧ характеристика представляет собой
линию, которую описывает годограф
(вектор модуля частотной характеристики
А) разомкнутой системы при изменении
частоты пропускаемого сигнала. При
изменении частоты от
имеет вид кривой 1, показанной на рис.
. АФЧ характеристика представляет собой
линию, которую описывает годограф
(вектор модуля частотной характеристики
А) разомкнутой системы при изменении
частоты пропускаемого сигнала. При
изменении частоты от![]() до
до![]() модуль АФЧХ уменьшается от коэффициента
разомкнутой системы
модуль АФЧХ уменьшается от коэффициента
разомкнутой системы![]() до 0.
до 0.
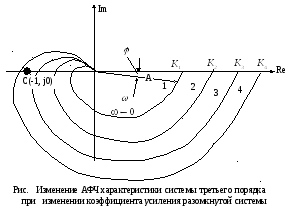
Фазовый сдвиг системы изменяется от 0 до -270 градусов (три звена первого порядка по 900). Система с отрицательной обратной связью является устойчивой:
- если общий сдвиг по фазе всех элементов разомкнутой системы не превышает -1800, тогда отрицательная обратная связь не превращается в положительную.
- общий сдвиг элементов системы по фазе может быть более -1800 , но тогда модуль частотной характеристики должен быть не более 1.
Эти два условия выражаются критерием
Найквиста, согласно которому АФЧХ
разомкнутой системы при изменении
частоты
![]() до
до![]() не должна охватывать точку С(-1,j0).
Это означает, что при отставании по фазе
более -1800 коэффициент системы
не должен быть более 1.
не должна охватывать точку С(-1,j0).
Это означает, что при отставании по фазе
более -1800 коэффициент системы
не должен быть более 1.
Система управления с АЧФ 1 является
устойчивой, но имеет большую остаточную
ошибку (линия 1 на предыдущем рисунке),
которая равна
![]() .
Повышение коэффициента системы за счет
коэффициента регулятора доK2
уменьшает ошибку, но приближает
годограф к точке С(-1,j0).
При этом в системе появляется
колебательность. Дальнейшее увеличение
коэффициента до значенияK3
еще более снижает ошибку, но
повышает колебательность системы. И
при коэффициентеK4
годограф начинает охватывать
точку С(-1,j0) и отрицательная
обратная связь превращается в положительную
с коэффициентом по замкнутому контуру
системы более 1, что приводит к расходящимся
колебаниям.
.
Повышение коэффициента системы за счет
коэффициента регулятора доK2
уменьшает ошибку, но приближает
годограф к точке С(-1,j0).
При этом в системе появляется
колебательность. Дальнейшее увеличение
коэффициента до значенияK3
еще более снижает ошибку, но
повышает колебательность системы. И
при коэффициентеK4
годограф начинает охватывать
точку С(-1,j0) и отрицательная
обратная связь превращается в положительную
с коэффициентом по замкнутому контуру
системы более 1, что приводит к расходящимся
колебаниям.
Таким образом, увеличение коэффициента пропорциональной части регулятора может привести к допустимой величине ошибки регулирования, но его значение ограничено возможностью получения неустойчивости и большой колебательности процесса. В практике коэффициент усиления пропорциональной составляющей регулятора выбирают из условия получения устойчивой системы с затухающим переходным процессом с перерегулирование 20-30% и 1-2 колебаниями. Такой переходной процесс считается оптимальным.
ПИ – регулятор.Назначение интегральной составляющей регулятора.

В управляющем воздействии ПИ - регулятора добавляется интегральная составляющая:
![]()
где -
![]() коэффициент
при интегральной составляющей.
коэффициент
при интегральной составляющей.
Передаточная функция ПИ-регулятора
![]() Введение интегральной составляющей
позволяет устранить статическую ошибку
системы. Суть заключается в следующем.
Введение интегральной составляющей
позволяет устранить статическую ошибку
системы. Суть заключается в следующем.
АФЧХ интегрирующего звена имеет вид.
Модуль частотной характеристики
(коэффициент передачи) уменьшается с
увеличением частоты. При нулевой
частоте коэффициент передачи интегрирующего
звена стремится к бесконечному значению.
![]()
![]() .
.
При этом остаточная ошибка стремиться
к нулевому значению
![]() .
.
Н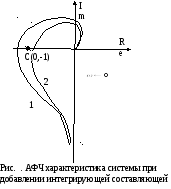 едостатком
включения интегрального звена является
то, что оно дает на всех частотах
дополнительное фазовое запаздывание
на 900. Это приводит к повороту АФЧХ
системы дополнительно на 900против
часовой стрелки и повышению значения
коэффициента разомкнутой системы при
фазовом сдвиге -1800 (линия 1 на рис.
). Это приводит к потере устойчивости
системы. Для восстановления устойчивости
уменьшают коэффициент пропорциональной
части (переход к характеристике 2 на
рис.), что в свою очередь приводит к
увеличению динамической ошибки системы.
едостатком
включения интегрального звена является
то, что оно дает на всех частотах
дополнительное фазовое запаздывание
на 900. Это приводит к повороту АФЧХ
системы дополнительно на 900против
часовой стрелки и повышению значения
коэффициента разомкнутой системы при
фазовом сдвиге -1800 (линия 1 на рис.
). Это приводит к потере устойчивости
системы. Для восстановления устойчивости
уменьшают коэффициент пропорциональной
части (переход к характеристике 2 на
рис.), что в свою очередь приводит к
увеличению динамической ошибки системы.
Следует отметить, что при работе с интегрирующими звеньями, например управление углом положения выходного вала электрические двигатели, уровнем жидкости в емкости П-регуляторы успешно работают, т.к. система является астатической за счет интегральной составляющей объекта управления и остаточная ошибка отсутствует.
Назначение дифференциальной составляющей регулятора.
Пропорционально-интегрально-дифференциальный (ПИД-регулятор).
Управляющее воздействие ПИД – регулятора дополнительно имеет дифференциальную составляющую, которая пропорциональна производной ошибки:
![]()
где
![]() - коэффициент при дифференциальяной
составляющей.
- коэффициент при дифференциальяной
составляющей.
Преобразуем передаточную функцию ПИД-регулятора.
 .
.
где:
![]()
Мы получили интегро-дифференцирующее
звено. Знаменатель - интегральная часть
дает бесконечное значение коэффициента
на низких частотах и устраняет остаточную
ошибку. Числитель – два дифференцирующих
звена дают опережение по фазе в
настраиваемой области частот. Это
позволяет только в области D (см
рис. ) уменьшить коэффициент передачи
замкнутой системы и не допустить
о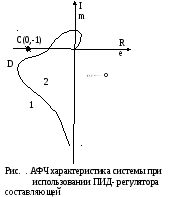 хватывания
АФЧ характеристикой точки устойчивости
С(-1,j0), что позволяет
использовать интегрирующее звено, не
снижая коэффициент разомкнутой системы
в области низких частот.
хватывания
АФЧ характеристикой точки устойчивости
С(-1,j0), что позволяет
использовать интегрирующее звено, не
снижая коэффициент разомкнутой системы
в области низких частот.
Амплитудная фазовая частотная характеристика системы с П-, ПИ-, ПИД – регулятором. Вопрос рассмотрен выше в пунктах 28-30.
Разработка системы управления заданной структуры методом ММ.
Методика моделирования линейной системы с ПИД регулятором в системе Simulink.
Системы математического моделирования позволяют проводить эксперименты с системой управления до построения ее модели в «железе». Моделирование производится на математических моделях элементов системы, входных воздействий и т.д. При этом воспроизводятся все закономерности и особенности работы элементов и всей системы управления в целом. Это позволяет без изготовления макетов системы выявить ее основные закономерности, качественные показатели, возможные недостатки. Кроме того, исследование работы системы на математических моделях позволяет использовать современные математические методы расчета и анализа систем управления. Методика синтеза систем управления методом математического моделирования заключается в следующем.
Технологический процесс изучается как объект управления.
Выявляются и изучаются закономерности (механизмы) процесса.
Проводится структурный анализ процесса с выявлением управляемых, управляющих, воздействий.
Строится функциональная схема системы управления.
Разработка системы управления.
Строится математические модели всех элементов системы.
Изучаются возмущающие воздействия и строится их математическая модель.
Строится структурная схема системы управления.
Нахождение параметров управляющего устройства методом ММ..
В системе Simulinkстроится схема системы управления.
Производится моделирование системы управления при заданных закономерностях изменения задающего и возмущающих воздействий.
Методом экспериментирования на модели подбираются параметры регулятора, обеспечивающие требуемые или максимально достижимые качественные показатели работы системы.
Используя функцию NCDсистемыSimulinkпроизводится нахождение оптимальных настроек регулятора методом нелинейного программирования.
Н а
рис. приведена схема моделирования
системы управления в системеSimulink,
позволяющая проводить исследования
закономерностей работы системы при
различных структурах управляющего
устройства, различных закономерностях
изменения задающего и возмущающего
воздействия. Можно исследовать влияние
возмущающих воздействий, приложенных
в различных точках системы, изменения
характеристик элементов системы.
а
рис. приведена схема моделирования
системы управления в системеSimulink,
позволяющая проводить исследования
закономерностей работы системы при
различных структурах управляющего
устройства, различных закономерностях
изменения задающего и возмущающего
воздействия. Можно исследовать влияние
возмущающих воздействий, приложенных
в различных точках системы, изменения
характеристик элементов системы.
Получение в Simulink для системы с ПИД регулятором
устойчивого/неустойчивого состояния системы управления.
См вопрос 28.
Устранение в системе с ПИД регулятором статической ошибки.
См вопрос 29.
Методика настройки ПИД регулятора.
Параметры регулятора настраиваются по виду переходного процесса на единичное задающее воздействие. При очередной смене коэффициентов строится переходной процесс и анализируется его вид. Методика настройки заключается в следующем:
Отключить интегральную и дифференциальную составляющие регулятора.
Постепенно увеличивая коэффициент пропорциональной составляющей найти предельное значение, при превышении которого система становится неустойчивой.
Уменьшая коэффициент пропорциональной части получить устойчивую систему с затухающим переходным процессом со следующими показателями качества- перерегулирование 20-30%, количество колебаний 1.5-2. При этом возможно наличие остаточной ошибки.
Подключается интегральная составляющая с малым значением коэффициента.
Постепенно увеличивая коэффициент интегральной составляющей добиваются получения переходного процесса с постоянными или медленно расходящимися колебаниями.
Подключают дифференциальную составляющую с малым коэффициентом и постепенно увеличивая его, получить устойчивый затухающий переходной процесс с 1.5-2 колебаниями и перерегулированием 20-30%.
Увеличивая дифференциальную составляющую попытаться уменьшить время регулирования при тех же перерегулировании и количестве колебаний переходного процесса.
Показать методику настройки регулятора методом моделирования в Simulink
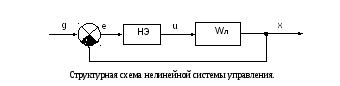
Введение в нелинейные системы управления. Существенные отличия от линейных.
К нелинейным системам относятся системы при наличии элементов с существенными нелинейностями типа релейной характеристики, зоны нечувствительности, зоны насыщения и др.
В линейных системах при положительных корнях системы имеют место расходящиеся неустойчивые колебания системы, которые при разработке системы стараются исключить. На мощности элементов систем ограничены, и расходящиеся колебания имеют ограничения. При этом появляются нелинейные эффекты. Кроме того, нелинейные системы создаются целенаправленно. Например, релейные системы просты и часто позволяют добиться приемлемых результатов. Эти особенности требуют применения других методов анализа систем.
Н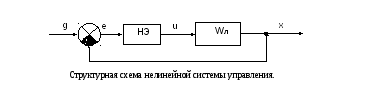 елинейные
системы при анализе приводятся к типовой
структурной схеме, включающей нелинейный
элемент и один линейный элемент, к
которому приводятся все линейные
элементы системы. Методика анализа
заключается в следующем:
елинейные
системы при анализе приводятся к типовой
структурной схеме, включающей нелинейный
элемент и один линейный элемент, к
которому приводятся все линейные
элементы системы. Методика анализа
заключается в следующем:
Составляются уравнения отдельных элементов с линеаризацией несущественных нелинейностей.
Составляется структурная схема системы.
Преобразуется структурная схема и выделяются линейная и нелинейная части.
Производится анализ системы.
При анализе удобно выбирать в качестве выходных переменных воздействия, поступающие на вход нелинейного элемента.
Основные задачи исследования нелинейных систем.
Отыскание возможных состояний равновесия и исследование их устойчивости.
Выявление периодических движений, определение их параметров, анализ устойчивости.
Исследование переходных процессов из начальных точек к равновесным состояниям или автоколебательным.
Исследование точности системы.
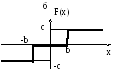
– 42. Типовые нелинейности. Математическая модель релейного элемента без зоны нечувствительности без гистерезиса и с гистерезисом, с зоной нечувствительности без гистерезиса, с гистерезисом.
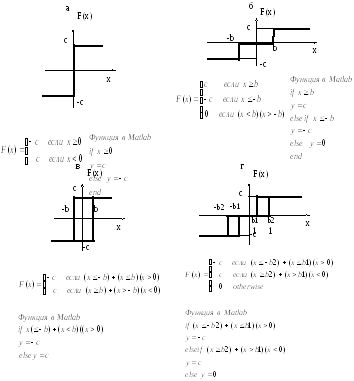
Математическая модель нелинейного элемента насыщения.
Математическая модель нелинейного элемента с зоной нечувствительности.

Методика анализа нелинейной САУ методом математического моделирования.
Разработка системы управления с заданной структурой в системе Simulink позволяет исследовать работоспособность системы, определить устойчивость системы, качественные показатели работы системы при изменении задающего воздействия, при отработке возмущающих воздействий, определить параметры системы, обеспечивающие работу системы с качественными показателями.
Порядок подготовки исходных данных и проведения моделирования системы.
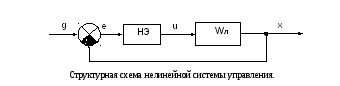
1. Для элементов системы управления: задающего устройства, элемента сравнения, релейного элемента, усилителя, исполнительного механизма, объекта управления, датчика регулируемой величины построить математические модели. Путем структурных преобразований линейные элементы привести к одному элементу, и систему привести к типовому виду систем с нелинейным элементом.
Подготовить в системе Simulink математическую модель для моделирования системы управления, приведенную на рисунке. Ввести данные для элементов.

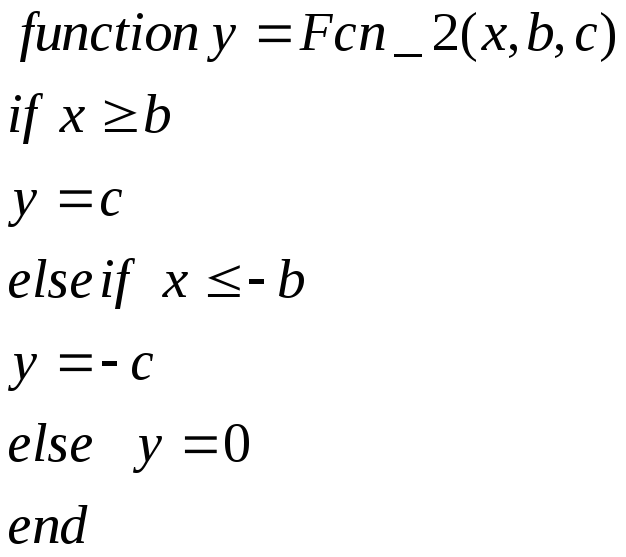
В
 текстовом редакторе ввести оператор
функцию для релейного элемента.
Например, для релейного элемента,
приведенного на рисунке она имеет вид:
текстовом редакторе ввести оператор
функцию для релейного элемента.
Например, для релейного элемента,
приведенного на рисунке она имеет вид:
Провести моделирование системы. Выбрать длительность интервала моделирования, обеспечивающую наглядность анализа работы системы.
Исследовать и построить графики переходных процессов при отработке системой заданного и возмущающего воздействий.
Исследовать влияние зоны нечувствительности на ошибку регулирования, автоколебания в системе, продолжительность переходного процесса.
Исследовать влияние величины сигнала на выходе релейного элемента.
Исследовать влияние постоянных времени элементов линейной части системы.
Исследовать возможность образования и параметры автоколебательных режимов в
системе управления.
Сделать выводы по работоспособности системы и необходимости ее доработки.
46-47, 49-50. Метод фазовой плоскости и его применение. Анализ САУ на фазовой плоскости. Анализ фазовых траекторий методом припасовывания (путем численного решения дифференциальных уравнений). Построение фазовых траекторий, переходных процессов в MathCad.
На фазовой плоскости удобно исследовать нелинейные системы управления второго порядка. При этом по оси абсцисс откладывается выходная переменная системы управления, которая, согласно структурной схеме, является и входной переменной нелинейного элемента. По оси ординат удобно откладывать производную выходной переменной.
В ТАУ есть специальный метод построения фазовых траекторий. Но на компьютере удобно строить фазовые траектории путем численного интегрирования системы уравнений, описывающих работу системы управления. При численном интегрировании на каждом шаге расчета производится анализ состояния нелинейного элемента, и линейная часть рассчитывается для конкретного состояния входного сигнала. При этом следующие друг за другом результаты расчета являются продолжением предыдущих результатов, т.е. последующие решения припасовываются к предыдущим. Отсюда название метода – метод припасовывания.
Порядок исследования нелинейной системы на фазовой плоскости.
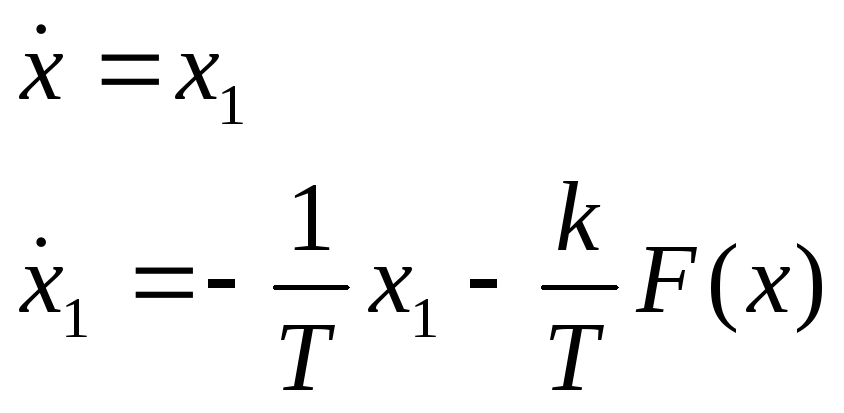
Строится математическая модель линейной части системы и записывается в форме Коши.
Например, передаточная функция второго порядка линейной части имеет вид:
![]() Дифференциальное уравнение будет
Дифференциальное уравнение будет![]()
С учетом нелинейной функции нелинейного
элемента
![]() и
отрицательного знака для величины хна элементе сравнения уравнение будет
иметь вид
и
отрицательного знака для величины хна элементе сравнения уравнение будет
иметь вид![]()
Перепишем уравнение, оставив в левой части только старшую производную,
![]() введем переменную
введем переменную![]() и запишем уравнение второго порядка в
виде системы двух уравнений в форме
Коши
и запишем уравнение второго порядка в
виде системы двух уравнений в форме
Коши
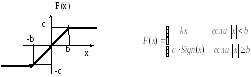
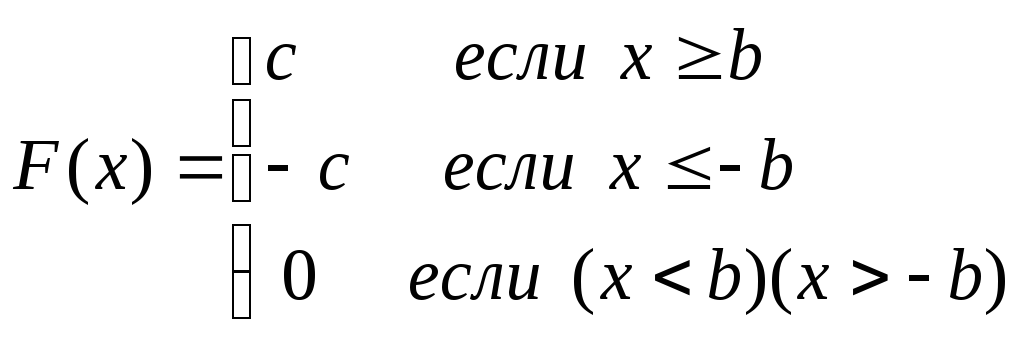
Построим математическую модель нелинейного элемента. Пусть используется реле с зоной нечувствительности bбез гистерезиса. Нелинейность опишем в виде логической функции.
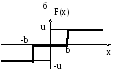
В зависимости от значения x
имеем три зоны, в которых правая часть
системы уравнений Коши будет иметь
различный вид. Запишем систему уравнений
в виде трех пар уравнений, значениеF(x)в которых определяется логикой работы
реле. В первых двух системах уравнения
изменяется знак при управляющем
воздействииu, в
последней управляющее воздействие![]()

Система управления описана системой
дифференциальных уравнений. Теперь
можно задать количественные значения
параметров, начальные условия по
координатам
![]() и, используя алгоритм численного
интегрирования системы дифференциальных
уравнений, найти движение системы.
и, используя алгоритм численного
интегрирования системы дифференциальных
уравнений, найти движение системы.
Пусть
![]()
![]()
![]()
![]()
Зададимся начальными значениями
![]()
![]()
Используя метод Рунге-Кутта с фиксированным шагом, найдем решение системы
![]()
здесь: x01 – вектор начальных условий,
0-100 – отрезок времени, на котором ищется решение.
1000 – количество точек решения на заданном отрезке времени.
DU - система дифференциальных уравнений.
Решением является матрица X1, имеющая 3 столбца (1-й столбец время, второй, третий столбцы вектор искомых переменных – выходная переменная и ее производная) и 1000 строк по количеству ординат решения системы уравнений.
Необходимо помнить, что нумерация столбцов и строк по умолчанию в MathCadначинается с 0.
График движения фазовой точки на фазовой плоскости имеет вид
Здесь: по оси абсцисс второй столбец вектора Х1, по оси ординат третий столбец X1.

Построение графика переходного процесса.
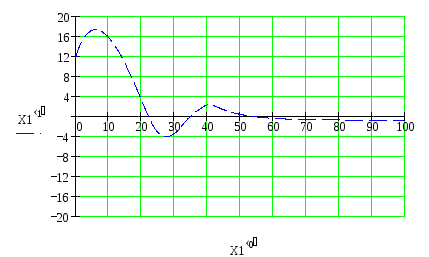
Здесь: по оси абсцисс - время (первый столбец вектора Х1), по оси ординат - выходная координата системы (второй столбец X1).
Анализ результатов моделирования.
Система управления устойчивая, не имеет автоколебательного режима.
Ошибка несколько раз изменяет знак, скорость также бывает положительной –система разгоняется и отрицательной – система тормозится.
Остаточная ошибка системы находится в пределах зоны нечувствительности реле.
Время регулирования составляет около
50 сек (дискретов
![]() по времени).
по времени).
Преобразование моделей непрерывных систем к уравнению Коши.
См. предыдущий вопрос и вопросы 25-27.
Приложения.
Методы решения дифференциальных уравнений.
1) Классический метод.
2) Метод Коши.
3) Преобразования Лапласа.
4) Графический метод.
5) Численный метод.