

Лабораторная работа №4 Синтез корректирующих устройств по критериям модульного, симметричного и компромиссного оптимумов.
Цель работы: выбрать структуру и настроечные параметры регулятора в соответствии с заданным критерием качества. Оценить “грубость” выбранных корректирующих устройств по отношению к изменяющимся параметрам объекта управления.
1. Критерий модульного оптимума (мо)
Критерий технического (амплитудного, модульного) оптимума МО обеспечивает выбор параметров регулятора на основании следующих требований к форме АЧХ замкнутой системы: характеристика в рабочем диапазоне частот должна соответствовать АЧХ идеального фильтра нижних частот, имеющему, как известно, прямоугольную частотную характеристику.
Наиболее близкую по форме к прямоугольной АЧХ имеет фильтр Баттерворта, у которого
АБ() = WБ(j)= 1/sqrt[1 + (T)2 n].
Нетрудно убедиться, что колебательное звено второго порядка
W(p) = 1/(T2p2 + 2Tp + 1)
при коэффициенте
демпфирования
=
![]() /2
имеет АЧХ
/2
имеет АЧХ
А() = к/sqrt(1 + T44),
соответствующую частному случаю фильтра с n = 2. Переходный процесс является оптимальным по длительности (имеет наименьшее время регулирования tp 3T), а максимальный выброс меньше 0,05к (или 0,05кА при А 1).
Разомкнутый контур, настроенный на технический оптимум, имеет передаточную функцию
1
 WМО
(р) = ,
WМО
(р) = ,
аМ Тμ р (Т μ р + 1)
где аМ = 2 – стандартный коэффициент настройки, Тμ – наименьшая постоянная времени контура. На практике этот коэффициент берётся в диапазоне 0,5 ≤ аМ ≤ 4. Уменьшение значения аМ по сравнению со стандартным снижает запас по фазе и, следовательно, повышает перерегулирование. Например, при аМ = 1 (квадратичный оптимум) запас по фазе ∆φ = 450, время переходного процесса уменьшается, а перерегулирование возрастает. При аМ = 4 имеем пограничный апериодический режим, запас по фазе ∆φ = 810, время переходного процесса увеличивается до 16Тμ.
Структура и параметры регулятора определяются на основании равенства
Wмо(s)=Wку(s)*Wp(s),
откуда
![]()
где Wку(s) – передаточная функция корректирующего устройства; Wp(s) – передаточная функция разомкнутого контура системы управления.
1.2. Для системы управления, представленной на рис. 1, необходимо выбрать структуру и настроечные параметры регулятора. Регулятор должен обеспечить плавный переходный процесс и нулевую статическую ошибку.
Объект управления – тиристорный преобразователь и якорь двигателя постоянного тока с независимым возбуждением – представлен двумя апериодическими звеньями первого порядка. Параметры звеньев приведены в таблице 1. Структурная схема набора в MATLAB приведена на рис. 2.
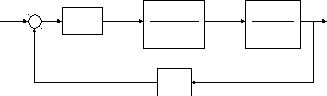
UРС кТП 1/RЯ∑ IЯ
WРТ(р)
_ ТТП р + 1 ТЯ р + 1
UДТ
кДТ
Рис. 1
Таблица 1.
|
№ |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
|
Ттп, с |
0.01 | |||||||||
|
Ктп |
12 |
13 |
14 |
15 |
16 |
17 |
18 |
19 |
20 |
21 |
|
Rя, Ом |
0,123 |
0,256 |
0,175 |
0,152 |
0,381 |
0,481 |
0,272 |
0,301 |
0,368 |
0,436 |
|
Тя, с |
0,085 |
0,076 |
0,058 |
0,064 |
0,071 |
0,08 |
0,049 |
0,055 |
0,061 |
0,074 |
|
Кдт |
0,1 |
0,11 |
0,15 |
0,18 |
0,17 |
0,12 |
0,16 |
0,13 |
0,14 |
0,19 |
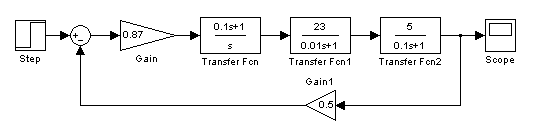
Рис. 2
Снять переходные характеристики САУ при аМ = 1, 2 и 4 и определить время регулирования при 5% отклонении выходной координаты от установившегося значения. Рассчитать в MathCAD показатели качества управления (время переходного процесса, перерегулирование), построить логарифмические (амплитудную и фазовую) частотные характеристики и определить запасы устойчивости по амплитуде и фазе и сравнить полученные результаты.
Изменить один из параметров объекта управления на ±20% и снять кривые переходных процессов (или рассчитать их в MathCAD). Определить время переходного процесса и перерегулирование. Выполнить анализ полученных результатов.
1.3. Для системы управления, представленной на рис. 3, необходимо выбрать структуру и настроечные параметры регулятора. Регулятор должен обеспечить плавный переходный процесс и нулевую статическую ошибку. Объект управления – апериодическое звено первого порядка (коэффициент передачи 1/Кдт , постоянная времени 2ТТП) и интегрирующее звено с постоянной времени Тм = 1,2*Тя. Остальные параметры приведены в таблице 2.
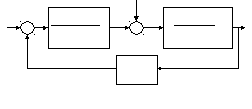
1 / к ДТ f RЯ к Д
Хвх(р) - - Хвых(р)
2 ТТП р + 1 Т М р
кДС
Рис. 3
Таблица 2
|
№ |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
|
RЯ, Ом |
0,164 |
0,047 |
0,234 |
0,148 |
0,237 |
0,179 |
0,128 |
0,108 |
0,218 |
0,257 |
|
Кдc |
1,38 |
1,54 |
1,12 |
1,44 |
1,23 |
1,65 |
1,83 |
1,98 |
1,76 |
1,84 |
Снять переходные характеристики САУ при 20% изменении расчётных значений параметров регулятора и f = const. Определить перерегулирование и время регулирования при 5% отклонении выходной координаты от установившегося значения. Сравнить полученные результаты с предыдущими.