

РГР / kontrolnaya_rabota_raschet_sar_skorostyu_peremesheniya_robot
.docЗадание и исходные данные
Дифференциальное уравнение скорости привода перемещения робота имеет вид:
![]() ,
,
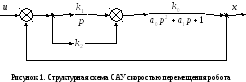
где u – задающий сигнал привода; x – выходной сигнал координаты перемещения робота;
![]() .
.
Необходимо:
-
обосновать необходимость и проанализировать способы последовательной коррекции работы САУ;
-
на основании непрерывной модели САУ синтезировать цифровой закон управления объектом из условия получения переходного процесса с 5%-ным перерегулированием, определить требуемые параметры принятого закона управления, а также значение коэффициента усиления k0;
-
реализовать в пространстве сигналов и в пространстве состояний математическую модель непрерывной САУ на ЭВМ при единичном ступенчатом воздействии;
-
записать дискретную передаточную функцию цифрового аналога принятого непрерывного закона управления и составить структурную схему цифрового варианта проектируемой САУ;
-
составить и реализовать математическую модель полученной цифровой САУ в переменных состояния на ЭВМ, сравнить результаты моделирования с таковыми, полученными в для непрерывной модели.
Обоснование коррекции САУ. Анализ способов последовательной коррекции САУ
Для того, чтобы добиться желаемого качества процессов управления (устойчивость, качество переходного процесса, точность отработки заданного входного воздействия) в систему вводят, как правило, дополнительные динамические устройства (звенья), которые называются корректирующими устройствами.
Основная задача корректирующих устройств состоит:
-
Сделать систему управления устойчивой, если она без них была неустойчивой.
-
Обеспечить требуемые качества переходных процессов.
-
Обеспечить заданную точность отработки известных входных воздействий.
Широко распространенной является последовательная коррекция САУ. В зависимости от требований к показателям качества регулирования САУ применяются корректирующие устройства:
- с пропорциональным законом регулирования (П-регулятор);
- с пропорционально-интегральным законом регулирования (ПИ-регулятор);
- с пропорциональным интегро-дифференцирующим законом регулирования (ПИД-регулятор).
П-регулятор обеспечивает самые высокие показатели качества регулирования САУ, однако не обеспечивает стабилизации выходной величины на заданном значении при наличии возмущений в САУ. Применение ПИ-регулятора устраняет статическую ошибку регулирования САУ, однако является причиной существенного перерегулирования выходной величины при появлении возмущений. ПИД-регулятор обладает достоинствами вышеперечисленных последовательных корректоров и, кроме того, предотвращает скачкообразные изменения выходной величины, однако имеет более сложное выражение закона управления и физическую реализацию.
Для САУ скорости перемещения робота возможно применение ПИ- или ПИД-регуляторов, поскольку необходимо обеспечивать постоянство скорости перемещения робота для сохранения его производительности при любых допустимых изменениях нагрузки. Выполним синтез наиболее простого цифрового ПИ-регулятора на основе аналоговой модели САУ.
Синтез цифрового ПИ-регулятора на основе аналоговой модели САУ
Коэффициент передачи объекта регулирования k0 примем равным 1 c последующей возможной коррекцией в силу требований к динамическим показателям системы. Непрерывная передаточная функция объекта управления (привода перемещения) будет иметь вид:
![]() .
.
Непрерывная передаточная функция ПИ-регулятора имеет вид:
![]() .
.
Структурная схема аналоговой САУ представлена на рисунке 1.
Для определения
параметров регулятора используем
стандартную модель Баттерворта второго
порядка с характеристическим уравнением:
![]() .
.
Постоянные времени объекта управления могут быть найдены из системы следующего вида:

решение
которой дает:
![]() .
.
Повышение
быстродействия системы можно добиться
компенсацией большей постоянной времени
привода T2. Для
этого передаточная функция регулятора
должна иметь вид:
![]() .
Для заданной САУ имеем:
.
Для заданной САУ имеем:
![]() .
.
Передаточная функция разомкнутой САУ будет иметь вид:
![]() .
.
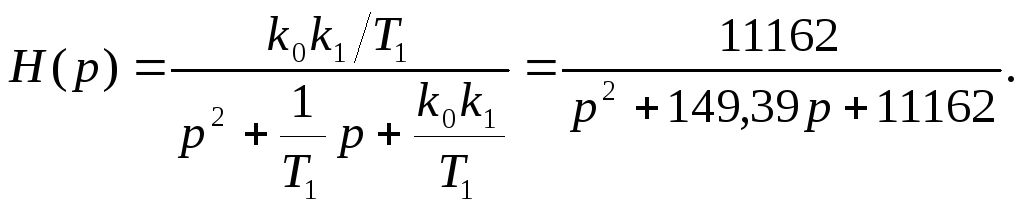
Передаточная функция замкнутой системы будет иметь вид:
 .
.
Характеристический полином системы имеет вид:
![]() .
.
Очевидно, что скорректированная САУ может быть описана дифференциальным уравнений стандартной колебательной системы второго порядка:
![]() ,
,
где ξ – коэффициент демпфирования колебаний; τ – постоянная времени системы, с характеристическим уравнением вида:
![]() .
.
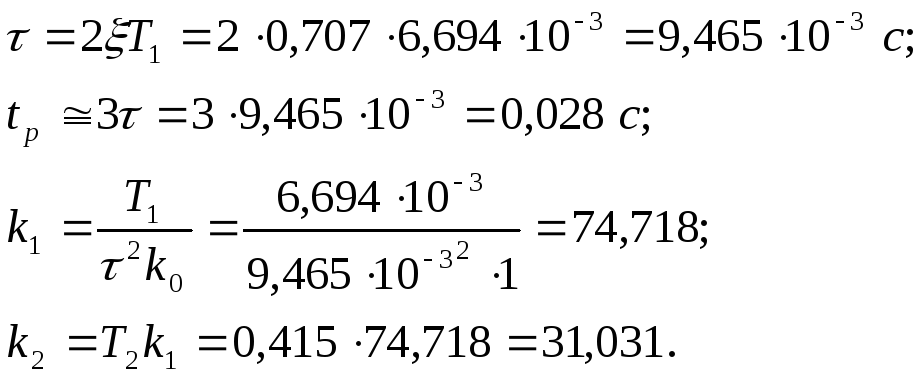
Для стандартной колебательной системы с перерегулированием 5% имеем:
![]() ;
tр – время
регулирования.
;
tр – время
регулирования.
Для того чтобы САУ соответствовала стандартной колебательной системе 2-го порядка необходимо выполнение условий:
![]() ,
,
откуда находим параметры:
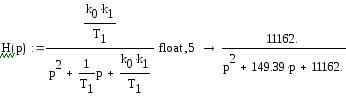
Таким образом, передаточная функция замкнутой САУ с оптимальным регулятором будет равна:
Составим дискретный аналог непрерывной САУ, используя тождества преобразований передаточных функций в дискретную форму:
![]() .
.
Передаточная функция ПИ-регулятора преобразуется к виду:
 .
.
где ΔТ – шаг дискретизации сигнала по времени.
Реализация непрерывной модели САУ в пространстве сигналов и пространстве
При подаче на вход системы ступенчатого управляющего воздействии, изображение по Лапласу сигнала на выходе САУ будет иметь вид:
![]() .
.
При помощи математического ПО Mathcad получим оригинал переходной функции синтезированной непрерывной САУ:
![]()
График непрерывной переходной функции изображен на рисунке 2.
О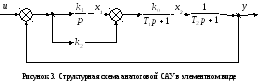 чевидно,
что переходный процесс выходной величины
непрерывной модели САУ удовлетворяет
заданным требованиям. Максимальное
значение выходной величины составляет
практически 1,05, а перерегулирование
достигает заданного значения 5%, время
регулирования – 0,03 с.
чевидно,
что переходный процесс выходной величины
непрерывной модели САУ удовлетворяет
заданным требованиям. Максимальное
значение выходной величины составляет
практически 1,05, а перерегулирование
достигает заданного значения 5%, время
регулирования – 0,03 с.
Математическая модель непрерывной САУ в пространстве состояний может быть описана следующей системой уравнений:
 (1)
(1)
которой удовлетворяет структура системы, изображенная на рисунке 3.
Система уравнений (1) в канонической форме будет иметь вид:
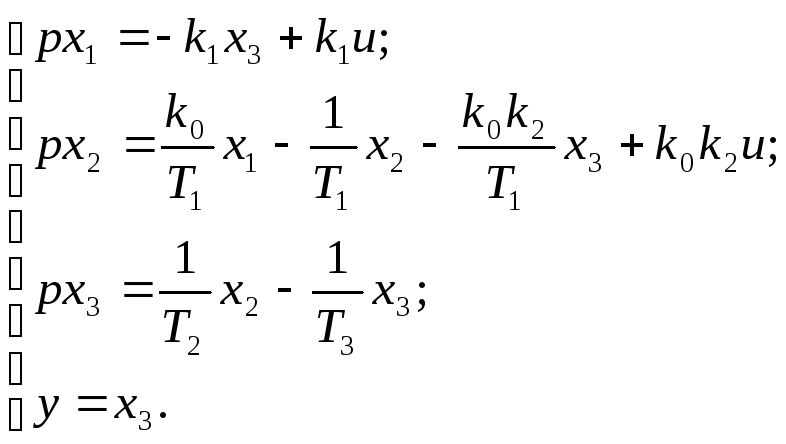 (2)
(2)
В матричной форме система уравнений (2) будет иметь вид:
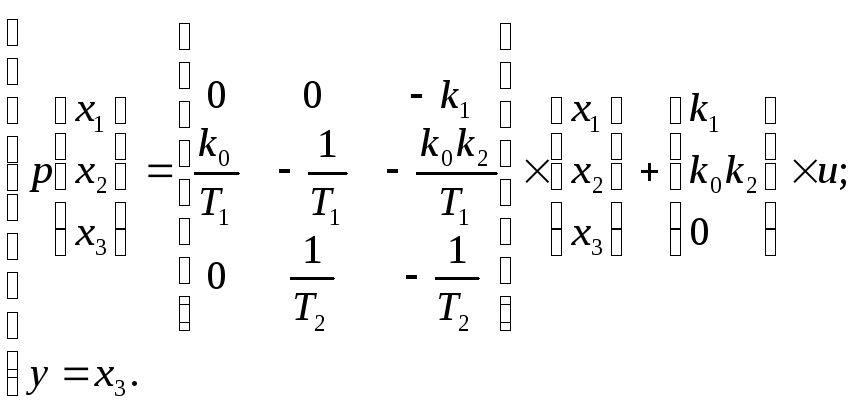 (3)
(3)
Таким образом, соответствующие матрицы системы в пространстве состояний будут равны:

Решение системы уравнений (3) при помощи ПО Mathcad дает:

![]()



![]()
![]()
М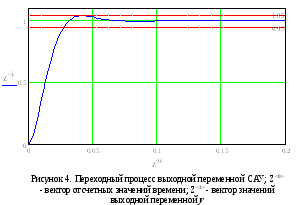 ассив
Z содержит 100 моментов
времени от 0 до 0,2 с и соответствующие
этим моментам решения переменных
состояния. График переходного процесса
выходной переменно y = x3
на рисунке 4. Очевидно, что нахождение
переходной функции операторным методом
совпадает с решением системы (3) для
выходной переменной, поскольку графики
на рисунках 2 и 4 практически идентичны.
ассив
Z содержит 100 моментов
времени от 0 до 0,2 с и соответствующие
этим моментам решения переменных
состояния. График переходного процесса
выходной переменно y = x3
на рисунке 4. Очевидно, что нахождение
переходной функции операторным методом
совпадает с решением системы (3) для
выходной переменной, поскольку графики
на рисунках 2 и 4 практически идентичны.
Z-передаточные функции дискретного аналога САУ
Структурная схема САУ с дискретным ПИ-регулятором представлена на рисунке 5.
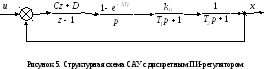
На
рисунке 5 блок с передаточной функцией
![]() представляет собой модуль экстраполяции
нулевого порядка, а физически – ЦАП
цифрового ПИ-регулятора, удерживающий
дискретный сигнал определенного уровня
на своем выходе в течение времени ΔT.
представляет собой модуль экстраполяции
нулевого порядка, а физически – ЦАП
цифрового ПИ-регулятора, удерживающий
дискретный сигнал определенного уровня
на своем выходе в течение времени ΔT.
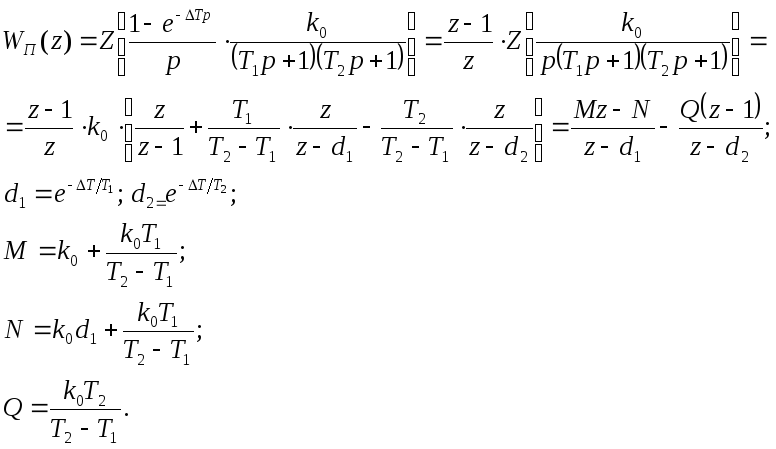
Z-преобразование передаточной функции приведенной непрерывной части САУ будет иметь вид:
Имея выражения z-передаточных функций регулятора и приведенной непрерывной части системы можно составить ее дискретную структуру, изображенную на рисунке 6.
С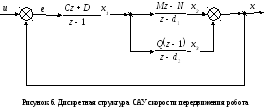 огласно
структуре на рисунке 6, система разностных
уравнений системы в z-форме
будет иметь вид:
огласно
структуре на рисунке 6, система разностных
уравнений системы в z-форме
будет иметь вид:
 (4)
(4)
Имея z-форму (4), получим соответствующую ей разностную форму во времени:
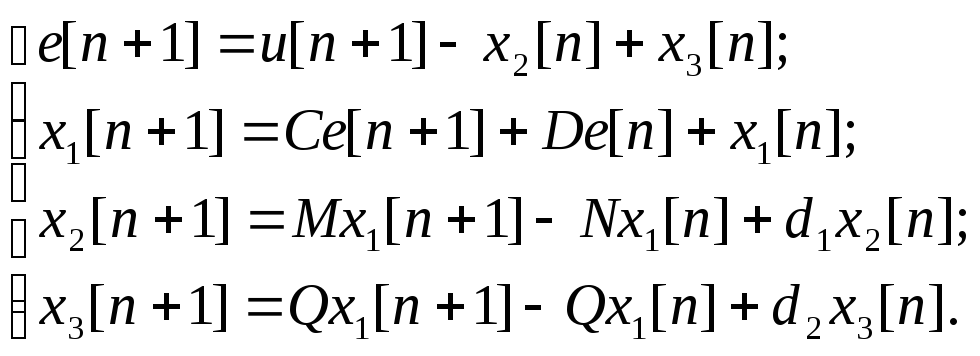 (5)
(5)
Реализация дискретной модели САУ на ЭВМ
Используя систему
разностных уравнений (5) определим
отсчетные значения дискретной переходной
функции САУ при помощи ЭВМ и ПО Mathcad
в интервале времени 0÷1 с шагом дискретизации
по времени
![]() .
.
Определение параметров модели в Mathcad:
![]()


![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Алгоритм для решения системы разностных уравнений (5):
![]()

Построение графика дискретной переходной характеристики системы:
![]()

Замечание. Для приемлемой точности расчетов переходной функции дискретной САУ шаг дискретизации ΔT необходимо выбирать на порядок меньшим в сравнение с наименьшей постоянной времени системы.
Очевидно, что график дискретной переходной функции практически идентичен таковому для переходной функции непрерывной САУ, изображенному на рисунке 2, что подтверждает справедливость выполненных расчетов при синтезе цифровой САУ на основе аналоговой модели.