

ФЕДЕРАЛЬНОЕ АГЕНСТВО ПО ОБРАЗОВАНИЮ РФ
ГОУВПО «Пензенский государственный университет»
Факультет заочной формы обучения
Кафедра: «Металлообрабатывающие станки и комплексы»
КОНТРОЛЬНАЯ РАБОТА
по дисциплине: «Теория автоматического регулирования»
«Тахогенераторы. Область их применения. Тахогенераторы постоянного и переменного тока»
ПЕНЗА 2009
Оглавление
Введение… ………………………………………………………..……..….…...2
1. Назначение и принцип работы…………………………………………...….2
1.1 Тахогенераторы изготовленные по технологии LongLife……..…......4
2. Тахогенераторы постоянного тока в схемах автоматики…………..……...6
3. Ассинхронные тахогенераторы……………………………..…………….....9
3.1 Конструкция и принцип действия асинхронного тахогенератора….....9
3.2. Погрешности асинхронного тахогенератора……………………............10
Заключение…………………………………………………………………..…..14
Список литературы…………………………………………….…………. …...15
Введение
Уровень развития материальной культуры человеческого общества в первую очередь определяется созданием и использованием источников энергии. Применение пара, а в последние 100 лет электричества, совершило техническую революцию в промышленности и оказало решающее влияние на развитие социальных отношений.
В настоящее время в наиболее развитых странах на одного человека приходится до 1О кВт всех видов энергии. Это примерно в 100 раз больше, чем мускульная мощность человека, которая еще 200 лет назад была основной в промышленности и сельском хозяйстве. С полным основанием можно считать, что сегодня технический и культурный уровень развития Государства определяется количеством электроэнергии, вырабатываемой на душу населения.
Основой для создания электрических машин и трансформаторов явился открытый М. Фарадеем закон электромагнитной индукции. Начало практического применения электрических машин было положено русским академиком Б. С. Якоби, который в 1834 г. создал конструкцию электрической машины, явившуюся прототипом современного электродвигателя. Практическое применение трансформаторов началось в 1876 г., когда русский ученый П. Н. Яблочков впервые применил трансформаторы для питания изобретенных им электрических свечей. Широкому применению электрических машин в промышленности способствовало изобретение русского инженера М. О. Доливо-Добровольского (1889) трехфазного асинхронного двигателя, отличающегося простотой конструкции и высокой надежностью. К началу ХХ в. были созданы почти все виды современных электрических машин и разработаны основы их теории. Начиная с этого времени быстрыми темпами происходит электрификация промышленности и транспорта.
Электрические машины малой мощности (микромашины), применяются в системах и устройствах автоматики и вычислительной техники в качестве функциональных элементов. Все электромашинные элементы автоматики разделяются на три группы: исполнительные двигатели, электромашинные усилители и информационные машины. Исполнительные двигатели осуществляют преобразование электрического сигнала в механическое перемещение, они могут быть асинхронными, постоянного тока и шаговыми. Электромашинные усилители служат для усиления мощности электрических сигналов.
Информационные машины (измерительными преобразователями (ИП) называются устройства, предназначенные для преобразования разного рода не электрических величин в электрические сигналы), включают в себя тахогенераторы (применяются для измерения скорости вращения объекта, используются в устройствах электропривода, в транспортных средствах, станкостроении и пр.), сельсины, магнесины и вращающиеся трансформаторы. Эти машины служат для преобразования механических величин (угла поворота, частоты вращения или ускорения) в электрический сигнал или для передачи механического перемещения на расстояние.
НАЗНАЧЕНИЕ И ПРИНЦИП РАБОТЫ
Тахогенератор это устройство, при вращении вала которого на его выходе вырабатывается электрическое напряжение. Величина этого напряжения пропорциональна скорости вращения вала тахогенератора. Для съёма этого напряжения традиционно применяется скользящий контакт, включающий графитовые щётки и медный коллектор. Однако образующийся на медной поверхности неравномерный оксидный слой вызывает периодические изменения сопротивления контакта, что приводит к колебаниям напряжения тахогенератора в виде шума. На низких скоростях эти шумы сравнимы с полезным сигналом. Тем не менее, медно-щёточный контакт остаётся популярным, так как имеет большое преимущество – отличные скользящие свойства графита и, как следствие, большой срок службы. Избавиться от проблем при работе тахогенератора в неблагоприятных средах поможет такой тахогенератор, у которого на медную рабочую поверхность коллектора нанесена серебряная дорожка. В этом случае при любых условиях сопротивление контакта щётки и коллектора остаётся низким. Благодаря низкой плотности тока, ширину контакта можно сделать маленькой. Если такие тахогенераторы использовать в сочетании со специальными низко абразивными щётками, то гарантирована устойчивая работа тахогенератора в течении всего срока службы.
ТАХОГЕНЕРАТОРЫ, ИЗГОТОВЛЕННЫЕ ПО
ТЕХНОЛОГИИ LONGLIFE.
Тахогенераторы, изготовленные по технологии LongLife, предназначены для управления, контроля и измерения во всех отраслях промышленности с высокими требованиями к срокам эксплуатации и износоустойчивости. Тахогенераторы позволяют измерять скорость и направление вращения в режиме реального времени с точностью 1:100000, при температурном режиме от –50 до +100 С. Изготавливаются как с цилиндрическим валом, так и с полым. Крепление либо фланцевое, либо с помощью лап. Исполнение возможно в комбинации с энкодером и ограничителем скорости. Тахогенераторы, изготовленные по технологии LongLife, показанны на рисунках 1 – 15.
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рисунок 1 – 15. Тахогенераторы, изготовленные по технологии LongLife | ||















ТАХОГЕНЕРАТОРЫ ПОСТОЯННОГО ТОКА В СХЕМАХ
АВТОМАТИКИ
Тахогенератор постоянного тока - это машина постоянного тока с независимым возбуждением или возбуждением постоянными магнитами, работающая в генераторном режиме. По конструкции он почти не отличается от машин постоянного тока. Тахогенераторы постоянного тока служат для измерения частоты вращения по значению выходного напряжения, а также для получения электрических сигналов, пропорциональных частоте вращения вала в схемах автоматического регулирования. Основными требованиями, предъявляемыми к тахогенераторам, являются: а) линейность выходной характеристики; б) большая крутизна выходной характеристики; в) малое влияние на выходную характеристику изменения температуры окружающей среды и нагрузки; г) минимум пульсаций напряжения на коллекторе.
На рисунке 9.5 показаны принципиальные схемы тахогенераторов постоянного тока с электромагнитным возбуждением (а) и возбуждением постоянными магнитами (б).
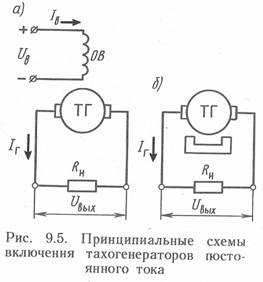
В случае электромагнитного возбуждения обмотку возбуждения ОВ подключают к источнику постоянного тока (рис. 9.5, а). Тахогенератор возбуждается и если его якорь привести во вращение с частотой n, то на выходе генератора появится постоянное напряжение Uвых. Уравнение выходной характеристики тахогенератора имеет вид

где rа - сопротивление обмотки якоря, Ом; Rн - внутреннее сопротивление прибора, подключенного к тахогенератору, Ом; Ф- основной поток; n- частота вращения машины.
Если пренебречь падением напряжения в щеточном контакте ∆Uщ, то следует, что чем больше сопротивление прибора Rн тем больше крутизна выходной характеристики Сu. Наибольшая крутизна у выходной характеристики, соответствующей режиму холостого хода тахогенератора, когда обмотка якоря разомкнута" (RH = ∞). С ростом тока нагрузки (уменьшением RH) крутизна выходной характеристики уменьшается.
У тахогенераторов постоянного тока Сu = (6÷ 260).10¯³В/(об/мин), что превышает крутизну асинхронных тахогенераторов.
Выходная характеристика тахогенератора постоянного тока - прямая линия. Однако опыт показывает, что выходная характеристика прямолинейна только в начальной части (при малых относительных частотах вращения), а с ростом частоты вращения она становится криволинейной (рис. 9.6, а). Криволинейность характеристики усиливается при уменьшении сопротивления нагрузки RH и увеличении частоты вращения n. Это объясняется размагничивающим действием реакции якоря в тахогенераторе. Для уменьшения криволинейности выходной характеристики не следует использовать тахогенератор на его предельных частотах вращения и применять в качестве нагрузки приборы с малым внутренним сопротивлением. В реальных условиях существует падение напряжения в щеточном контакте ∆Uщ, поэтому выходная характеристика тахогенератора выходит не из начала осей координат, а из точки на оси ординат, отстоящей от начала координат.
Uщ = -[∆Uщ/(1 + rа/ RH)]
Это приводит к появлению у тахогенераторов постоянного тока зоны нечувствительности ε=±nmin, В пределах которой он не создает на выходе напряжения .
Для уменьшения зоны нечувствительности в тахогенераторах применяют щетки с небольшим значением ∆Uщ, т. е. с малым сопротивлением (медно-графитные или серебряно-графитные). В тахогенераторах высокой точности (прецизионных) используют щетки с серебряными или золотыми напайками.
Погрешность измерительных тахогенераторов составляет 0.2….0.5%
АССИНХРОННЫЕ ТАХОГЕНЕРАТОРЫ
КОНСТРУКЦИЯ И ПРИНЦИП ДЕЙСТВИЯ АСИНХРОННОГО
ТАХОГЕНЕРАТОРА
Конструкция асинхронного тахогенератора ничем не отличается от асинхронного исполнительного двигателя с полым немагнитным ротором. Как и в ИД, одна из обмоток статора подключается к сети переменного тока и называется обмоткой возбуждения (ОВ), с другой - генераторной обмотки (ГО) снимается выходное напряжение .
Принцип действия асинхронного тахогенератора заключается в следующем (для упрощения качественного анализа примем полый ротор состоящим из конечного числа витков, замкнутых на торцах): при питании обмотки возбуждения переменным током частоты fВ возникает пульсирующий магнитный поток ФВ, который во вращающемся роторе индуцирует два вида ЭДС: трансформаторную ЭДС - ЕТ и ЭДС вращения - ЕВР.
В контурах, перпендикулярных оси обмотки возбуждения, под действием трансформаторной ЭДС протекают токи и возникает поток ФТР, который в соответствии с принципом Ленца направлен встречно потоку обмотки возбуждения, однако его действие компенсируется увеличением тока возбуждения. Так как ось генераторной обмотки перпендикулярна потоку ФТР, он не будет индуцировать в ней никакой ЭДС.
В контурах, параллельных оси обмотки возбуждения, но теперь уже под действием ЭДС вращения тоже протекают токи, которые создают свой поток ФВР. Он, пульсируя по оси генераторной обмотки, и наводит в ней выходную ЭДС.
Если принять, что магнитный поток возбуждения является гармонической функцией времени ф = Фmsin(w1t), то мгновенное значение ЭДС вращения будет евр = сеФmsin(w1t)n. Ток, созданный этой ЭДС, i = eвр/rр = cе/rр*Фmsin(w1t)n (индуктивным сопротивление ротора можно пренебречь, поскольку он немагнитный, да к тому же выполнен из материала с высоким удельным сопротивлением). При отсутствии насыщения магнитный поток пропорционален току фвр = kфi = kфcе/rр*Фmsin(w1t)n.
Тогда мгновенное значение выходной ЭДС будет е = -WГdфвр/dt = -WГkфcе/rр*Фmw1cos(w1t)n = Еmsin(w1t - 900). Угловая частота сети w1 = 2pf. Так как ЭДС изменяется по гармоническому закону, ее действующее значение будет
Таким образом, величина выходной ЭДС асинхронного тохогенератора пропорциональна угловой скорости вращения, а ее частота равна частоте сети возбуждения.
При подключении нагрузки выходное напряжение UГ станет меньше ЭДС ЕГ на величину внутреннего падения напряжения IГZГ
В общем случае асинхронный тахогенератор (АТГ) представляет несимметричную двухфазную машину, которую можно исследовать методом симметричных составляющих,
Выходное напряжение UГ не является линейной функцией относительной угловой скорости вращения n. Нелинейность создает квадратичная зависимость Вn2. Если Вn2 = 0, то UГ становится пропорциональным n, а тахогенератор считается идеальным. При проектировании АТГ выражение Вn2стремятся уменьшить как за счет уменьшения n так и за счет уменьшения В.
Так как n1 = 60f/р, то с целью уменьшения n тахогенераторы проектируют на большую частоту f. Правда при этом не уменьшают р, поскольку при р > 1, слабее проявляется магнитная несимметрия машины. Обычно р = 2.