

РГР / raschetnaya_rabota_issledovanie_sau
.docСодержание:
|
1. Переход от передаточной функции к модели объекта в переменных состояния |
3 |
|
2. Дифференциальное уравнение |
3 |
|
3. Аналитическое выражение для всех частотных характеристик |
4 |
|
4. Амплитудно-фазовая характеристика объекта |
5 |
|
5. АЧХ и ЛАЧХ |
6 |
|
6. ВЧХ и МЧХ |
7 |
|
7. Структурная схема системы, соответствующая дифференциальному уравнению |
8 |
|
8. Проверка устойчивости системы |
10 |
|
8.1. По критерию Гурвица |
10 |
|
8.2. По критерию Михайлова |
11 |
|
8.3. По критерию Найквиста |
11 |
|
9. Полная статическая ошибка |
12 |
|
10. Оценка качества переходного процесса системы по ВЧХ |
12 |
|
11. Проверка управляемости объекта по полученной системе дифференциальных уравнений |
13 |
|
12. Проверка наблюдаемости объекта по полученной системе дифференциальных уравнений |
13 |
|
13. Синтез системы, в
которой качество процессов будет
отвечать требованиям
|
14 |
1. Переход от передаточной функции к модели объекта в переменных состояния
Передаточная функция объекта:
![]() .
.
Дифференциальное уравнение данной системы управления (вывод в пункте 2):
![]() .
.
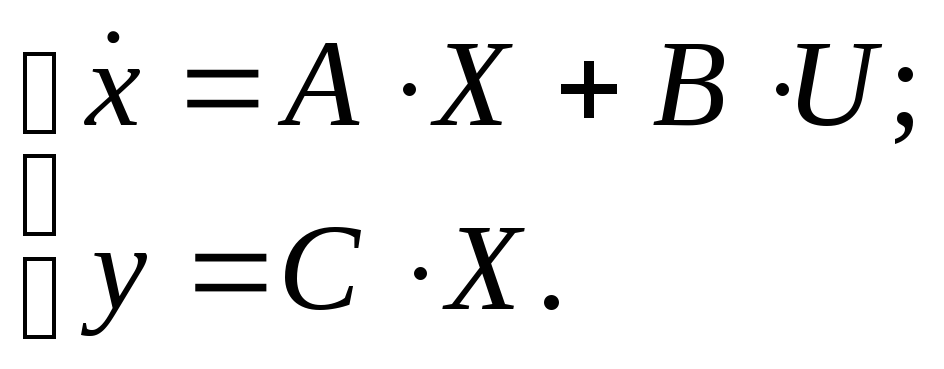
Перейдем к модели объекта следующего вида:
Введем переменные состояния:
![]()
![]()
![]()
Следовательно:
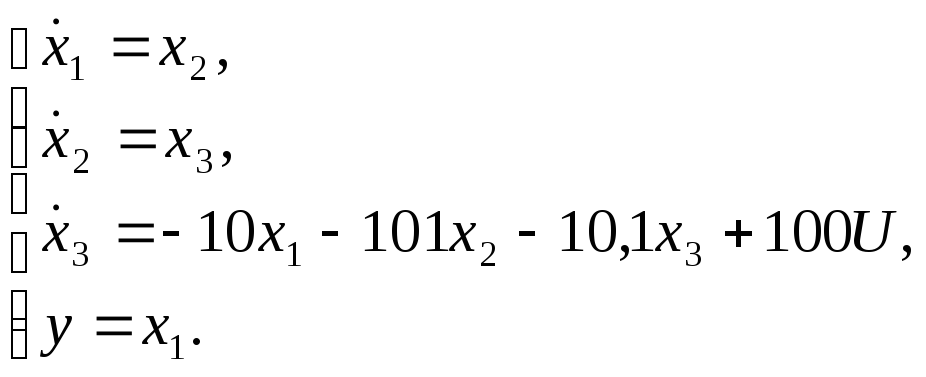
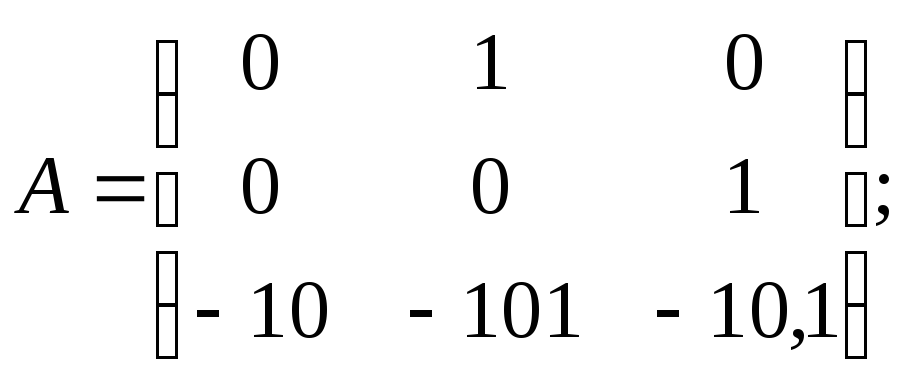
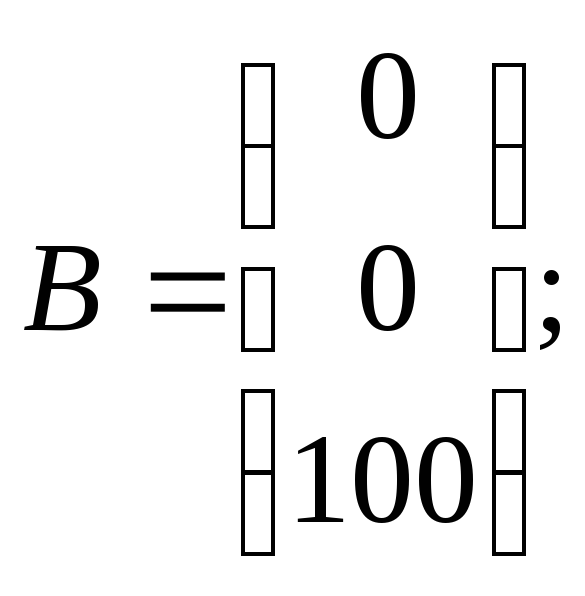
![]()
2. Дифференциальное уравнение
Передаточная функция объекта управления:
![]() ,
откуда
,
откуда
![]() ,
или
,
или
![]() ,
,
![]()
![]()
![]() ,
следовательно, производя обратное
преобразование Лапласа, получим
дифференциальное уравнение данной
системы управления:
,
следовательно, производя обратное
преобразование Лапласа, получим
дифференциальное уравнение данной
системы управления:![]() .
.
Левая часть этого дифференциального уравнения характеризует выходные параметры системы.
Правая часть характеризует входные воздействия.
3. Аналитическое выражение для всех частотных характеристик
Для получения аналитического выражения
амплитудно-фазовой частотной характеристики
сделаем подстановку
![]() в передаточной функции:
в передаточной функции:
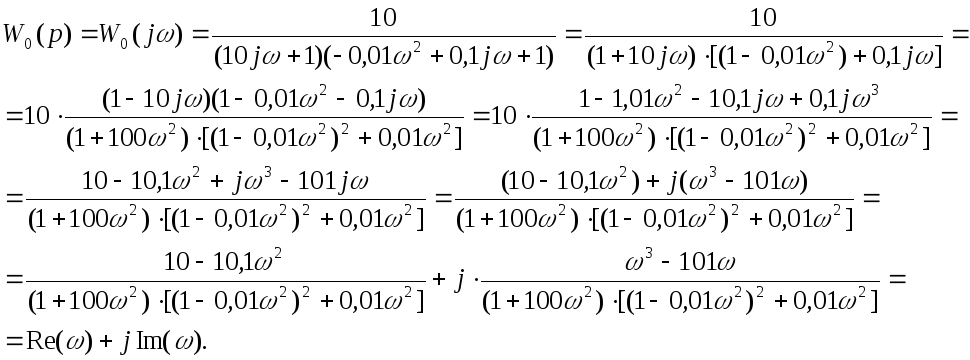
Следовательно, вещественная частотная характеристика может быть выражена аналитически следующим образом:
![]()
Выражение для мнимой частотной характеристики имеет вид:
![]()
Определим аналитическое выражение для амплитудной частотной характеристики:

Аналитическое выражение для фазовой частотной характеристики:
![]()
Логарифмическая амплитудная характеристика:

4. Амплитудно-фазовая характеристика объекта
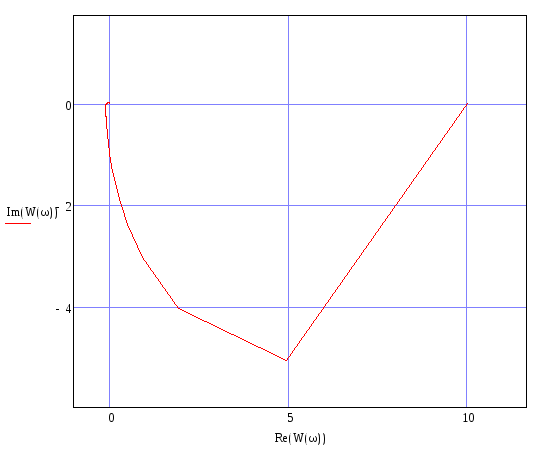
Рисунок 1. Амплитудно-фазовая частотная характеристика (годограф).
5. АЧХ и ЛАЧХ

Рисунок 2. Амплитудная частотная характеристика.
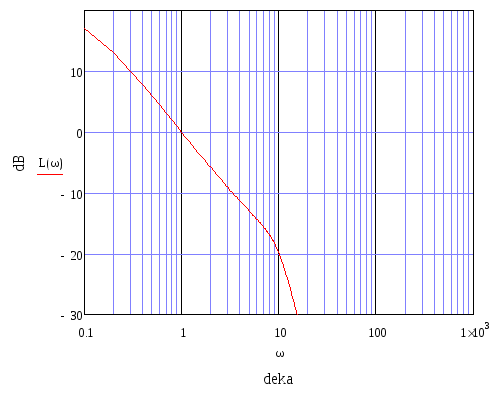
Рисунок 3. Логарифмическая амплитудная частотная характеристика.
6. ВЧХ и МЧХ
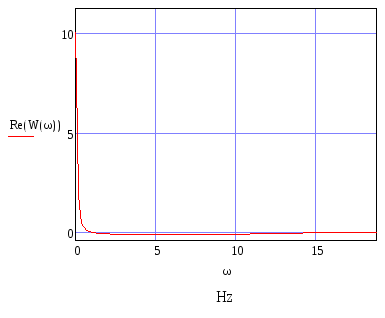
Рисунок 4. Вещественная частотная характеристика.
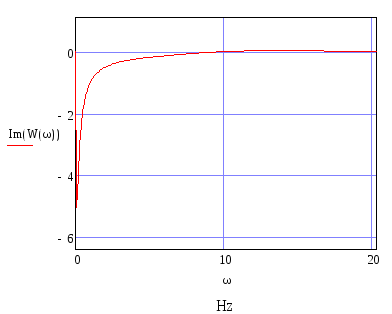
Рисунок 5. Мнимая частотная характеристика.
7. Структурная схема системы, соответствующая дифференциальному уравнению
Дифференциальное уравнение системы:
![]()
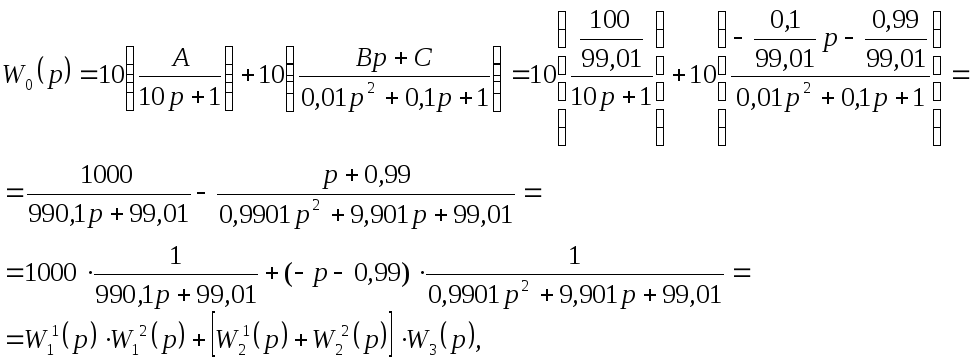
Передаточная функция объекта:
![]() .
.
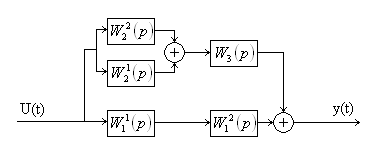
Структурная схема объекта:
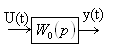
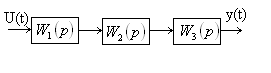
Представим передаточную функцию объекта через произведение передаточных функций нескольких более простых, последовательно соединенных звеньев, тогда структурная схема примет вид:
![]()
![]()
![]()
![]()
В этом случае сигналы через звенья:
![]() ;
; ![]() ;
; ![]() .
.
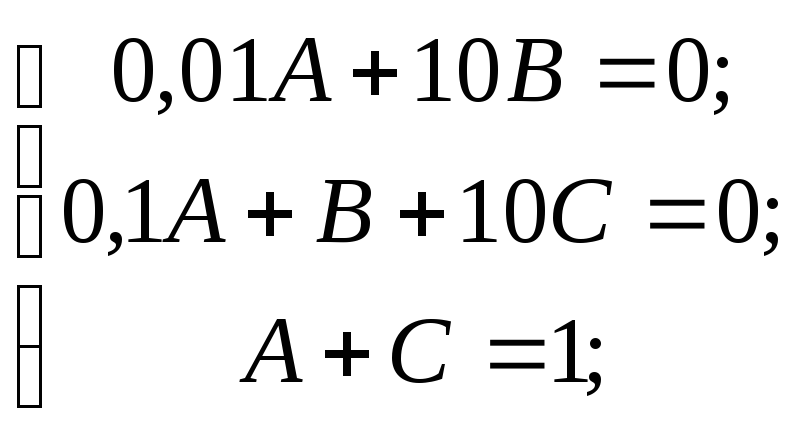
Представим передаточную функцию объекта через сумму передаточных функций нескольких более простых, параллельно соединенных звеньев, для чего воспользуемся методом неопределенных коэффициентов:
- пусть
![]() ,
где
,
где
А, B, C – неизвестные коэффициенты, которые нужно вычислить.
Перейдем к уравнению
![]() .
.
Приведем правую часть уравнения к общему знаменателю:
![]() ,
тогда
,
тогда
![]() ;
;
![]()
![]()
![]() .
.
Таким образом, можно перейти к системе:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Подставим вычисленные коэффициенты в выражение для суммы:
где:
![]()
![]()
![]()
![]()
![]()
Структурная схема объекта примет вид:
Сигналы через звенья: ![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
8. Проверка устойчивости системы
8.1. По критерию Гурвица
Дифференциальное уравнение системы:

Характеристическое уравнение системы:
![]() ;
;
![]() .
.
Многочлен
![]()
![]() =0,1;
=0,1; ![]() =1,01;
=1,01; ![]() =10,1;
=10,1; ![]() =1.
=1.
Определитель Гурвица:

Диагональные миноры определителя Гурвица:
1. ![]()
2. ![]()
Главный определитель:

Так как определитель Гурвица и все его диагональные миноры положительны, то система устойчива по критерию Гурвица.
8.2. По критерию Михайлова
Многочлен
![]()
Сделаем подстановку
![]() :
:
![]()
Построим годограф Михайлова:
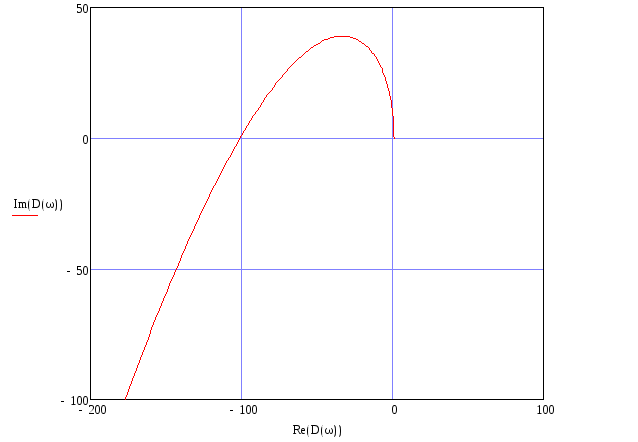
Рисунок 6. Годограф Михайлова.
Видно, что годограф Михайлова, начинаясь на действительной положительной полуоси, огибает против часовой стрелки начало координат, проходя последовательно 3 квадранта (система 3-го порядка), что означает, что исследуемая система устойчива по критерию Михайлова.
8.3. По критерию Найквиста
Передаточная функция системы имеет вид:
![]() .
.
АФХ разомкнутой системы приведена в пункте 4. Видно, что годограф АФХ разомкнутой системы не охватывает точку (-1;j0), следовательно, замкнутая система устойчива.
9. Полная статическая ошибка
Статическая ошибка – это расхождение установившегося значения сигнала после переходного процесса с требуемой величиной выходного сигнала:
![]() .
.
Установим произвольно некоторое заданное значение регулируемой величины:
![]() .
.
Начальное значение ВЧХ равно установившемуся значению переходной характеристики:
![]()
Тогда полная статическая ошибка:
![]()
При данном заданном значении регулируемой величины данная система имеет статическую ошибку 5%.
10. Оценка качества переходного процесса системы по ВЧХ
Данная система автоматического управления имеет вогнутую вещественную частотную характеристику, что позволяет судить о монотонной переходной характеристике и отсутствии перерегулировки.
Время переходного процесса
![]() можно оценить приблизительно по виду
ВЧХ. Оно определяется полосой частот,
при которых
можно оценить приблизительно по виду
ВЧХ. Оно определяется полосой частот,
при которых
![]() .
Эта полоса называется интервалом
положительности
.
Эта полоса называется интервалом
положительности
![]() .
При этом всегда
.
При этом всегда
![]() >
>![]() /
/![]() .
В нашем случае
.
В нашем случае
![]() .
Значит
.
Значит
![]() >10c.
>10c.
11. Проверка управляемости объекта по полученной системе дифференциальных уравнений
Для проверки управляемости объекта запишем матрицу управляемости:
![]()
Вычислим произведения матриц:
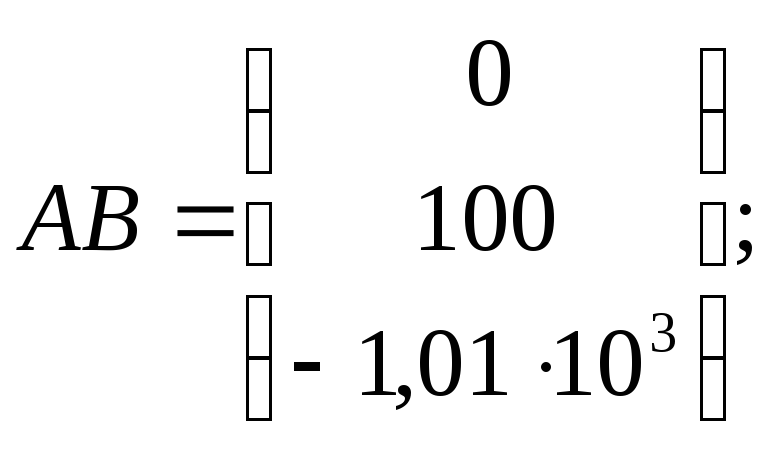

Матрица управляемости:
Определитель матрицы управляемости:
![]()
Т.к. матрица U не вырождена
![]() ,
то система управляема по критерию
управляемости.
,
то система управляема по критерию
управляемости.
12. Проверка наблюдаемости объекта по полученной системе дифференциальных уравнений
Для проверки наблюдаемости объекта запишем матрицу наблюдаемости:
Вычислим произведения матриц:
![]()
![]()
Матрица наблюдаемости:
Определитель матрицы наблюдаемости:
![]()
Т.к. матрица N не вырождена
![]() ,
то система наблюдаема по критерию
наблюдаемости.
,
то система наблюдаема по критерию
наблюдаемости.
13. Синтез системы, в которой качество
процессов будет отвечать требованиям
![]() ,
,
![]() ,
,
![]()
Передаточная функция исходной системы автоматического управления имеет вид:
![]() .
.
Для определения параметров регулятора используем операторную процедуру модального метода синтеза.
В качестве корректора статики используем интегрирующее звено с передаточной функцией
![]() ,
,
что гарантирует нулевую статическую
ошибку в системе
![]() .
.
С целью обеспечения требуемых динамических свойств формируем корректор динамики в виде
![]()
![]() ,
,
![]() ,
,
![]() ,
,
![]() - неизвестные коэффициенты регулятора.
- неизвестные коэффициенты регулятора.
Запишем характеристическое уравнение замкнутой системы:
![]()
Желаемое характеристическое уравнение тоже должно быть 4-го порядка. Выберем распределение корней так, чтобы они обеспечивали заданное качество процессов.
Т.к. в системе не допускается
перерегулирование, корни должны быть
вещественными, располагаться в левой
комплексной полуплоскости не ближе
![]() к мнимой оси.
к мнимой оси.
Исходя из этих ограничений, зададимся произвольными корнями желаемого характеристического полинома:
![]()
![]()
![]()
![]()
Тогда желаемый характеристический полином будет иметь вид:
![]()
Приравняем характеристический полином замкнутой системы к желаемому характеристическому полиному:
![]()
![]()
Таким образом, можно перейти к следующей системе:
![]()
Подставим полученные значения коэффициентов в передаточные функции корректоров статики и динамики:
![]()
![]()
Передаточная функция синтезированной системы имеет вид:

Список использованных дополнительных источников информации:
1. Бесекерский В.А., Попов ЕЛ. Теория автоматического регулирования. - М.: Наука, 1974.
2. Душин С.Е., Зотов Н.С. Теория автоматического управления. - М.: Высшая школа, 2003.
3. Курс лекций. Составил: к.т.н., доцент Тихонов А.И. 2002г.:
http://www.toehelp.ru/theory/tau/contents.html
4. Сайт «ТАУ - научно-техническая дисциплина»: http://www.tau-ntd.ru/index.html