

Выбор регуляторов
Основным вопросом при выборе регуляторов является вопрос правильности определения требуемой характеристики действия регулятора применительно к динамическим свойствам объекта.
При
отсутствии регулятора возмущение
вынуждает величину объекта изменятся
по некоторой кривой, присущей свойствам
данного объекта. Максимальное отклонение
величины в этих условиях зависит от
величины возмущения:
 .
.
Продолжительность
отклонения определяется временем
действия возмущения. Если включить
данный объект в систему регулирования,
то можно уменьшить абсолютную величину
отклонения
![]() и время, в течении которого отклонение
будет продолжатся.
и время, в течении которого отклонение
будет продолжатся.
Однако регуляторы с различными характеристиками действия дают разные результаты регулирования, что вызывает необходимость выбирать их соответственно свойствами объекта. При правильном выбранном регуляторе и при соответствующей его настройке степень затухания процесса регулирования должна быть примерно равна 0,75. При таком значении степени затухания кривая изменения величины получается наиболее благоприятной.
Выбор регуляторов на основании ориентировочных сведений об объекте
При отсутствии сведений о динамических свойствах проектируемого объекта выбор регулятора следует производить по аналогии с действующими объектами или же на основании предположительных соображений о свойствах данного и объекта, учитывая при этом критерии по выбору регуляторов. Помимо указанных критериев необходимо учитывать свойство объекта. Для регулятора непрерывного действия:

ПД – регуляторы применяются в объектах со средней емкостью, при большом времени запаздывания и при малых изменениях нагрузки.
ПИД – регуляторы применяются в объектах с любой емкостью, с очень большим запаздыванием и при больших и резких изменениях нагрузки.
По каналу «расход газа – температура нагрева» я выбрала ПД – регулятор;
По каналу «сила тока – температура нагрева» ПИД – регулятор.
Путем моделирования системы в среде MATLAB, были получены коэффициенты регулятора.
 ;
;
![]() .
.
Алгоритмическая схема АСР температуры приведена на рис.3.8
Тзад , Тизм – соответственно заданное измеренное значение температуры;
Qзад – заданный расход газа; f – возмущение;
I – сила тока.



Q f
![]()
![]()
![]()











Qзад
Тзад
Тизм








![]()
![]()
![]()
I









f

Рис. 3.8 Функциональная схема регулирования температуры
3.2 Моделирование системы в среде MathLab
Путем моделирования системы в среде MathLab была проведена параметрическая оптимизация системы, обеспечивающая требуемое качество процесса управления.
Схема моделирования приведена на рис.3.9.

Рис.3.9 Схема моделирования
В результате моделирования были получены расчетные кривые переходного процесса по возмущению из заданию.
Переходный процесс в системе является ее реакцией на внешнее воздействие, которая в общем случае может быть сложной функцией времени. Рассмотрим поведение системы при единичном ступенчатом воздействии 1(t).
Качество регулирования приинято оценивать следующими основными показателями: величиной перегулирования, быстродействием, колебательностью, статической точностью.
- перегулирование - максимальное отклонение переходной характеристики от установившегося значения выходной велечины, выраженное в относительных единицах или процентах.
![]() ;
;
-
быстродействие автоматических систем характеризуется временными оценками, к которым относятся: время запаздывания tз, время установления tу, время регулирования tр, в течении которого отклонение превышает отклонение регулируемой величины от hуст превышает некоторое допустимое значение . Обычно = 5%.
-
колебательность определяется числом полных колебаний регулируемой величины за время регулирования.
-
статическая точность – это точность регулирования в установившемся режиме, определяемая установившейся ошибкой системы, которая зависит от коэффициента усиления.
В результате моделирования были получены расчетные кривые переходного процесса при различных настройках регулятора:
1. По возмущению:
При настройках регуляторов:
![]() ;
;
![]() -
система устойчива, время регулирования
tрег=
260с, hmax
= 0,82 см.
рис. 3.10, а.
-
система устойчива, время регулирования
tрег=
260с, hmax
= 0,82 см.
рис. 3.10, а.
При изменениях коэффициентов первого регулятора получим следующие переходные характеристики:
![]() -
система неустойчива рис 3.10, б;
-
система неустойчива рис 3.10, б;
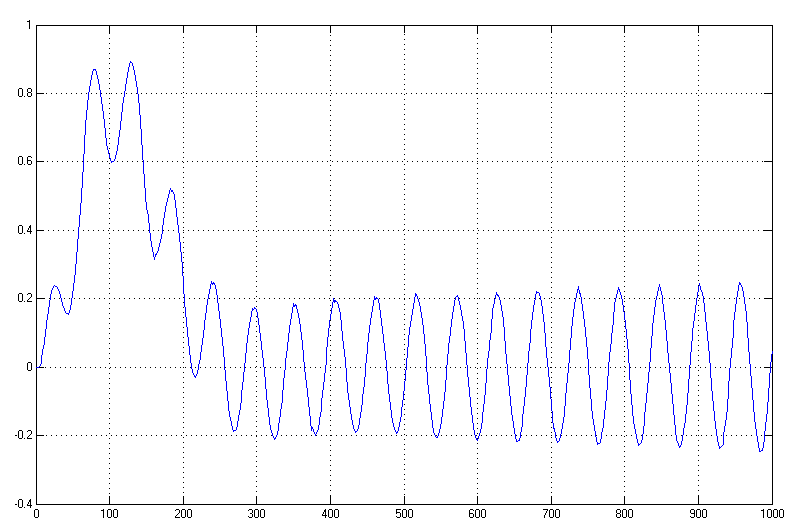
При незначительном изменении коэффициента
![]() -
система устойчива, но имеет колебательный
характер рис3.11, а.
-
система устойчива, но имеет колебательный
характер рис3.11, а.
При изменении настроек второго регулятора получим следующие переходные характеристики:
![]() -
система неустойчива рис 3.11, б;
-
система неустойчива рис 3.11, б;
![]() -
система на границе устойчивости;
-
система на границе устойчивости;
![]() -
система имеет колебательный характер
с большим временем регулирования;
-
система имеет колебательный характер
с большим временем регулирования;
При незначительном изменении кп система неустойчива рис. 3.12, а:
![]() .
.
-
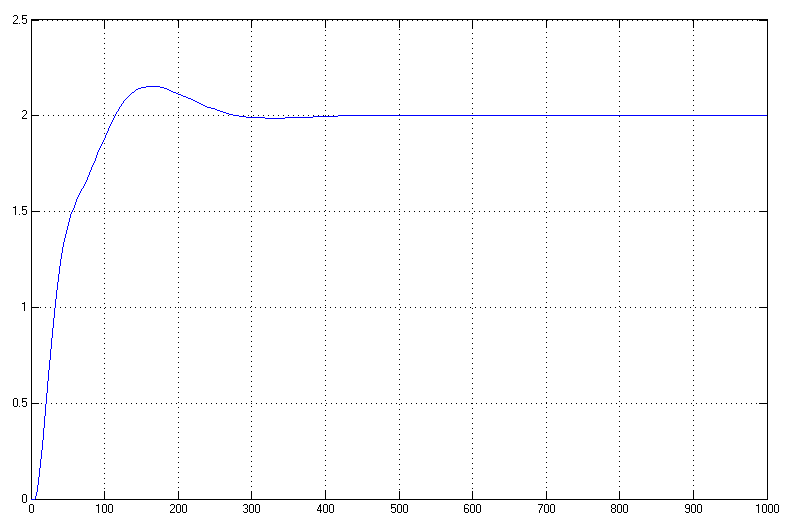
По заданию:
При настройках регуляторов:
![]() ;
;
![]() -
система устойчива, время регулирования
tрег=
200с, tу=
105с, hmax
= 2,2, hу
= 2,
= 10%, n=1
см. рис. 3.12, б..
-
система устойчива, время регулирования
tрег=
200с, tу=
105с, hmax
= 2,2, hу
= 2,
= 10%, n=1
см. рис. 3.12, б..
При изменениях коэффициентов первого регулятора получим следующие переходные характеристики:
![]() -
система неустойчива рис 3.13, а.
-
система неустойчива рис 3.13, а.
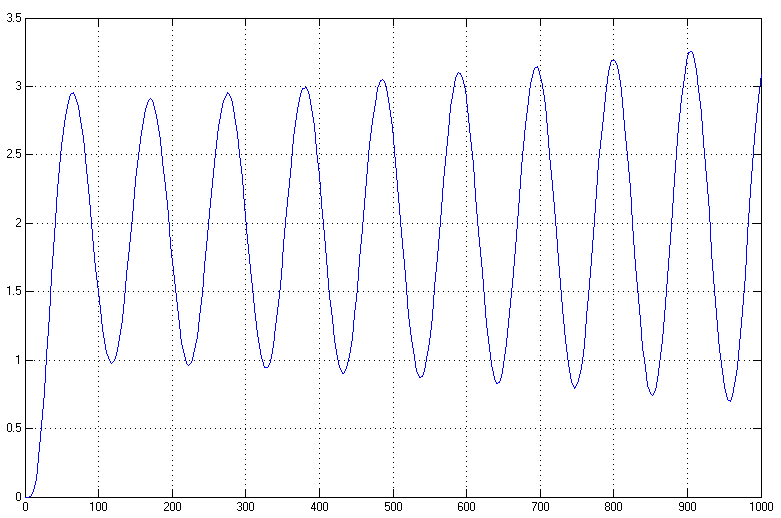
При изменениях коэффициентов второго регулятора:
![]() -
колебательная система, но все равно
походит к установившемуся значению рис
3.13, б;
-
колебательная система, но все равно
походит к установившемуся значению рис
3.13, б;
![]() -
колебательная система, с большим временем
регулирования;
-
колебательная система, с большим временем
регулирования;
-
По каналу «расход газа – температура» на систему действует задание и возмущение, а по каналу «сила тока – температура» только задание рис3.14, а.
-
По каналу «расход газа – температура» задание, а по каналу «сила тока – температура» задание и возмущение рис3.14, б.
-
По двум каналам действует и задание и возмущение рис3.15.

а)
б)
Рис. 3.10

а)

б)
Рис 3.11

а)

б)
Рис. 3.12

а)
б)
Рис. 3.13
б)

а)
Рис. 3.14

Рис. 3.15