

1.1.7 Побудова епюр для кривих стержнів
Кривим стержнем (брусом) називається стержень, геометрична вісь якого криволінійна.
Надалі будемо розглядати криві стержні, в яких:
а) геометрична вісь – плоска крива;
б) площина кривизни – площина симетрії;
в) діючі сили лежать в площині кривизни.
Внутрішні зусилля в поперечному перерізі бруса визначають методом перерізів через зовнішні зусилля, що діють по одну сторону від перерізу. В поперечних перерізах виникають в загальному випадку три внутрішні силові фактори: поздовжня сила N, поперечна сила Q та згинальний момент М.
В випадку, коли вісь кривого стержня являє собою дугу кола, положення любого перерізу зручно визначати за допомогою полярної системи координат, тоді поздовжня, поперечна сила та згинальний момент будуть функціями кута – N(), сила Q(), М().
Правила визначення N(), Q(), М().
Поздовжня сила N в вибраному перерізі дорівнює алгебраїчній сумі проекцій всіх зовнішніх сил, що розташовані по одну сторону від перерізу; сили проектуються на дотичну до геометричної осі в вибраному перерізі.
Правило знаків N (збігається з правилом знаків для балок та рам): якщо проекція зовнішньої сили направлена від перерізу (розтяг) то вона береться зі знаком “+”, якщо до перерізу (стиск), то знак “–”.
Поперечна сила Q в вибраному перерізі дорівнює алгебраїчній сумі проекцій всіх зовнішніх сил, що розташовані по одну сторону від перерізу; сили проектуються на радіус кривизни, проведений до точки перерізу.
Правило знаків Q (збігається з правилом знаків для балок та рам): якщо зовнішня сила намагається обертати відрізану частину стержня за годинниковою стрілкою то її проекція береться зі знаком “+”, якщо проти годинникової стрілки, то знак “–”.
Згинальний момент М в вибраному перерізі дорівнює алгебраїчній сумі моментів всіх зовнішніх сил відносно центра ваги перерізу, при цьому розглядаються моменти сил, що розташовані по одну сторону від перерізу.
Правило знаків М: якщо зовнішня сила намагається деформувати відрізану частину стержня таким чином, що його кривизна буде збільшуватись, то момент від цієї сили береться зі знаком “+”.
Диференціальні співвідношення між N(), Q(), М() виводяться на основі рівноваги елемента, виділеного з довільно навантаженого кривого стержня. Вони мають вид (для випадку, коли рівномірно розподілене навантаження відсутнє q = 0)
![]() ,
,
![]() ,
,
![]() ,
(1.7)
,
(1.7)
д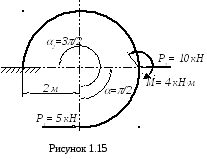 е
R – радіус кривизни стержня в
перерізі. Основні правила перевірки
правильності побудови епюр залишаються
такими ж, як і для балок та рам із
врахуванням особливостей диференціальних
залежностей (1.7).
е
R – радіус кривизни стержня в
перерізі. Основні правила перевірки
правильності побудови епюр залишаються
такими ж, як і для балок та рам із
врахуванням особливостей диференціальних
залежностей (1.7).
Приклад
Побудувати епюри внутрішніх силових факторів для криволінійного стержня, показаного на рисунку 1.15. Вихідні дані P1 = 5 кН; P2 = 10 кН; М = 4 кНм; R = 2 м, = /2, 2 = 3/2.
Розв’язування
Розділяємо стержень на дві ділянки і складаємо рівняння поздовжніх, поперечних сил та згинальних моментів для кожної з них (рис. 1.16).
Ділянка АВ
0 ;
N() = –P1cos().

Q( ) = –P1sin();
М( ) = –P1R[1 – cos()].
або 0 /2.
N() = –5cos();
Q( ) = –5sin();
М( ) = –10[1 – cos()].
Ділянка ВС.
2.
N() = –P1cos() – P2sin( – );
Q( ) = –P1sin() + P2cos( – );
М( ) = –P1R[1 – cos()] + P2Rsin( – ) + М.
або /2 3/2.
N() = –5cos() – 10sin( – /2);
Q( ) = –5sin() +10cos( – /2);
М( ) = –10[1 – cos()] + 20sin( – /2) + 4.
З інтервалом в /6 (300) 0 3/2 знаходимо значення внутрішніх силових факторів в перерізах (таблиця 1.1).
Таблиця 1.1
|
|
Ділянка АВ 0 /2 |
Ділянка ВС /2 3/2 |
||||||||||
|
00 |
300 |
600 |
900 |
900 |
1200 |
1500 |
1800 |
2100 |
2400 |
2700 |
||
|
N() , кН |
-5 |
-4,33 |
-2,5 |
0 |
0 |
-2,5 |
-4,33 |
-5 |
-4,33 |
-2,5 |
0 |
|
|
Q(), кН |
0 |
-2,5 |
-4,33 |
-5 |
5 |
4,33 |
2,5 |
0 |
-2,5 |
-4,33 |
-5 |
|
|
М(), кНм |
0 |
-1,34 |
-5 |
-10 |
-6 |
-1 |
2,66 |
4 |
2,66 |
-1 |
-6 |
|
За отриманими значеннями будуємо на осі криволінійного стержня епюри поздовжніх N(), поперечних сил Q() та згинальних моментів М() (рисунок 1.16).
Ординати згинальних моментів відкладені в сторону стиснутих волокон без вказівки знаку. При прийнятому правилі знаків ординати зі знаком “+” до центра кривизни від осі стержня, “–” від центра кривизни від осі стержня. При побудові на розтягнутих волокнах – навпаки.
Відкладаються ординати поздовжніх N() та поперечних сил Q() зі знаком “+” на зовнішні стороні стержня, із обов’язковим указанням знака.
Перевірка епюр.
В точці А прикладена зосереджена сила Р1 по дотичній до осі стержня, в цій точці на епюрі N() – стрибок на величину цієї сили. На епюрах Q() та М() в точці А стрибків немає. Графіки плавно виходять із нуля.
В точці В прикладена зосереджена сила Р2, перпендикулярно до осі стержня, та момент М. В цій точці на епюрі Q() – стрибок на величину сили Р2, на епюрі М() – стрибок на величину момента М. На епюрі N() в точці В стрибків немає.
Епюра Q() перетинає нульову лінію (вісь стержня) двічі – в точці В, та при = 1800. В цих перерізах на епюрах N() та М() будуть екстремальні точки (або дотична до епюр паралельна дотичній до осі стержня в перерізі).
В додатку Б наведена програма, інструкція до написання програми та результати розрахунку приведеної вище задачі із застосуванням пакета програм Mathcad 2000.