

14.3 Вращение без указания осей (плоско-параллельное перемещение)
Положение осей вращения, перпендикулярных плоскостям проекций П1 или П2 можно не указывать. Кроме того, чтобы избежать наложения исходных и дополнительных проекций, новые проекции точек объекта допускается перемещать в плоскостях их вращения на свободное поле чертежа.
Пример. Определить истинные размеры треугольника АВС и угол его наклона к плоскости П1 (рисунок 83).
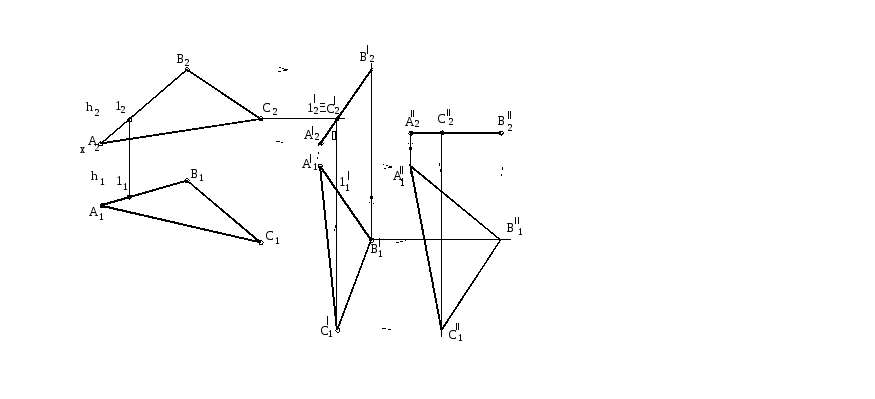
Рисунок 83
Для определения истинной величины треугольника нужно выполнить два последовательных преобразования проекционного чертежа:
-
треугольник АВС перемещается в положение, перпендикулярное плоскости П2 и проецируется на нее в виде отрезка прямой.
-
второе плоско-параллельное перемещение, в положение, параллельное плоскости П1, позволяет определить истинную величину треугольника АВС.
Для решения задачи в треугольнике проведена горизонталь С1(h1). Затем повернули треугольник так, чтобы горизонталь стала перпендикулярной к плоскости П2. Размеры проекций А1В1С1 и А1/В1/С1/ равны (переносятся с помощью циркуля или кальки). Расстояния от проекций треугольника до оси Х произвольные. Последовательность остальных построений показана стрелками. Угол наклона проекции А2/В2/С2/ к оси Х равен углу наклона плоскости треугольника к горизонтальной плоскости проекций П1, а проекция А2//В2//С2// соответствует истинной величине треугольника АВС.
14.4 Вращение плоскости вокруг следов (cпособ совмещения)
Вращение плоскости вокруг одного из ее следов – частный случай способа вращения вокруг линии уровня, так как следы являются нулевыми горизонталью и фронталью плоскости.
Сущность способа - заданная плоскость вращением вокруг одного из следов, совмещается с плоскостью проекций, которой принадлежит этот след. Фигура, лежащая в заданной плоскости, на эту плоскость проекций проецируется в натуральную величину и форму.
Пример. Совместить плоскость Р с плоскостью проекций П1 (рисунок 84).

Рисунок 84 Рисунок 85
Осью вращения будет горизонтальный след плоскости Р, поэтому положение Р1 (горизонтального следа плоскости Р) неизменно.
Для определения совмещенного с плоскостью П1 положения фронтального следа (Р2/) на нем выбрана произвольная точка N, которая при вращении описывает окружность радиуса ОN. Плоскость этой окружности перпендикулярна горизонтальному следу, пересекается с ним в точке О1 и на П1 проецируется в линию. Истинная величина радиуса вращения (R) точки N определена способом прямоугольного треугольника. Совмещенный с плоскостью П1 фронтальный след Р2/, проходит через Рх и N2/ (О1N2/= R). Положение проекции N2/ можно найти на пересечении дуги радиуса РХМ2, проведенной из точки схода следов РХ до пересечения с горизонтальной проекцией траектории точки N (длина отрезка РХN2 при вращении не изменяется).
Совмещение плоскости Р с плоскостью П2 (вращение вокруг фронтального следа) предлагается выполнить по аналогии самостоятельно.
На рисунке 85 выполнено совмещение заданной плоскости Р и лежащей в ней точки А с плоскостью проекций П1. Для этого вначале найдено совмещенное с плоскостью П1 положение горизонтали А0N/2 (h0), на которой находится точка А, и на ней отмечена точка А0.
Чтобы найти истинную величину плоской фигуры, лежащей в заданной плоскости, надо совместить с одной из плоскостей проекций ряд характерных точек ее периметра.