

14.2 Метод вращения
Сущность метода вращения заключается в том, что плоскости проекций остаются неподвижными, а меняется положение объекта проецирования путем вращения вокруг неподвижной оси до удобного положения для проведения необходимых построений.
Если ось вращения не задана, ее располагают перпендикулярно к одной из плоскостей проекций, так как упрощаются все построения при решении задач.
Действительно, если ось вращения перпендикулярна к какой – либо плоскости проекций, то плоскость , в которой вращается точка, параллельна этой плоскости проекций. Траектория движения точки на эту плоскость проекций проецируется без искажения, а на вторую плоскость проекций проецируется в виде отрезка прямой линии.
Вращение вокруг оси, перпендикулярной плоскости проекций
Рассмотрим этот метод на примере (рисунок 79) поворота точки А вокруг оси i, перпендикулярной плоскости П1, на некоторый угол. Траектория перемещения точки – окружность, плоскость которой перпендикулярна оси i и параллельна плоскости П1. Поэтому на плоскость П1 проецируется без искажения. Фронтальная проекция этой траектории будет прямая, параллельная оси Х. Точка О является центром вращения точки А, а отрезок А1О1=А1/О1 – радиус вращения.

Рисунок 79 Рисунок 80
Пример. Определить длину отрезка АВ и угол наклона его к горизонтальной плоскости проекций П1 (рисунок 80).
Ось вращения i проходит через точку В и перпендикулярна П1. Вращая отрезок АВ вокруг оси i, в положение параллельное фронтальной плоскости проекций П2, позволяет спроецировать отрезок на эту плоскость без искажения. При вращении точка А перемещается по дуге в плоскости, параллельной плоскости П1 до положения пока А1/В1 станет параллельно оси Х. При этом фронтальная проекция А2 перемещается по прямой А2А2/ параллельной оси Х. Отрезок [АВ]=[А2/В2].
Вращение вокруг линии уровня
Форму плоской фигуры, занимающей общее положение относительно плоскостей проекций, можно определить поворотом вокруг ее горизонтали (или фронтали) в положение, параллельное соответствующей плоскости проекций. На рисунке 81 показано вращение точки А вокруг горизонтальной прямой MN до тех пор, пока точка А не окажется в плоскости, параллельной плоскости проекций П1 и определяемой этой точкой и осью вращения.
При вращении вокруг горизонтальной прямой MN точка перемещается по дуге радиуса ОA0, лежащей в плоскости Р, перпендикулярной к оси вращения. Когда точка A займет нужное положение A1, горизонтальная проекция радиуса вращения (ОА1/) будет равна его истинной величине, которая может быть определена способом прямоугольного треугольника.
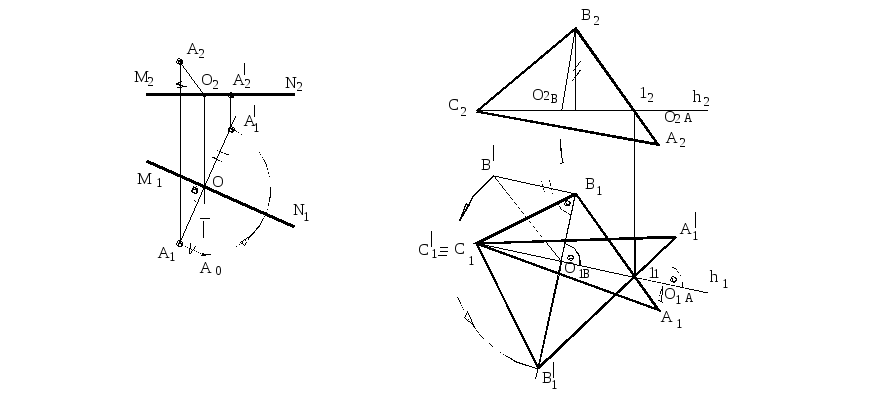
Рисунок 81 Рисунок 82
Пример. Определить истинную величину треугольника АВС (рисунок 82).
Возьмем в качестве оси вращения горизонталь C1(h1). Так как ось вращения параллельна плоскости П1, траектории перемещения вершин А и В будут проецироваться на эту плоскость в виде прямых, перпендикулярных проекции С111.Точки ОА и ОВ пересечения плоскостей этих траекторий с осью С1(h1) являются центрами вращения соответствующих вершин треугольника. Радиусы вращения точек А и В в исходном положении проецируются на плоскости П1 и П2 с искажением. Когда плоскость АВС в результате поворота займет горизонтальное положение, радиусы ВОВ и АОА спроецируются на плоскость П1 в истинную величину.
На рисунке 82 для построения проекции А1/В1/С1/ треугольника в горизонтальном положении, достаточно любым способом найти истинную величину радиуса ВО1В или АО1А и отложить ее на горизонтальной проекции траектории перемещения соответствующей вершины. В примере истинная величина радиуса вращения ВО равна В/O1В.
О1ВВ/ найдена способом прямоугольного треугольника и этим радиусом отложено расстояние от оси вращения до нового положения вершины В1/. Сторона А1/В1/ проведена из вершины В1/ через 11 до пересечения с горизонтальной проекцией плоскости вращения точки А. А1/ В1/С1/ – истинная величина треугольника АВС.