2. Особенности использования рлс в системах разделения движения.
Правилом 10 МППСС-72 прямо не регламентировано использование судовых РЛС, но надежное выполнение требований этого Правила без использования судовых радиолокационных средств затруднительно.
Мореплаватель обоснованно предполагает, что в системе разделения движения каждое судно будет следовать в своей полосе в принятом на ней общем направлении; судно, вынужденное пересечь полосу движения, сделает это под прямым углом к общему направлению потока. Эти предположения проверяются с помощью РЛС.
При глазомерной оценке ситуации предпочтительнее использовать достаточно крупномасштабную шкалу дальности, чтобы следы послесвечения лучше выделялись. Такой шкалой является шкала 4 мили со сдвигом начала развертки или шкала 5 миль, если начало развертки не сдвигается.
Входя в систему разделения, наблюдатель у РЛС должен в первую очередь убедиться в том, что его судно будет находиться в своей полосе движения.
С помощью РЛС наблюдатель может убедиться, что его судно не вышло за пределы своей полосы движения и что навстречу не идет «самое левое» встречное судно.
Эхо-сигнал скоростного судна, пересекающего систему разделения движения, легко выделяется наблюдателем по специфической «прыгающей» с каждой разверткой отметке и очень длинному прерывистому следу послесвечения.
При пересечении полосы движения в случае необходимости маневра для расхождения следует отдавать предпочтение маневру изменением скорости, так как, отворачивая от опасного судна, можно выйти из своей полосы движения.
3. Учет навигационных условий при решении задачи расхождения судов.
Суда, следующие вдоль узкого прохода или фарватера или пересекающие узкость, должны в полной мере использовать радиолокатор, как и другие навигационные средства, для выполнения Правила 9 МППСС-72.
При плавании в узкости в условиях ограниченной видимости судоводитель с помощью РЛС контролирует движение судна по намеченному пути следования и обеспечивает безопасное расхождение с судами.
Радиолокационная прокладка должна обеспечивать решение обеих задач и учитывать не только подвижные цели -- суда, но и плавучие средства навигационного оборудования.
В узкости маневр, который выбирают и обосновывают для расхождения, должен одновременно и в равной степени обеспечивать и навигационную безопасность своего судна.
При этом, учитывая стационарность СНО, расчету маневра для расхождения с судном должен всегда предшествовать расчет выхода своего судна в поворотную точку, который зачастую обусловливает выбор момента для расхождения с судном или вид маневра.
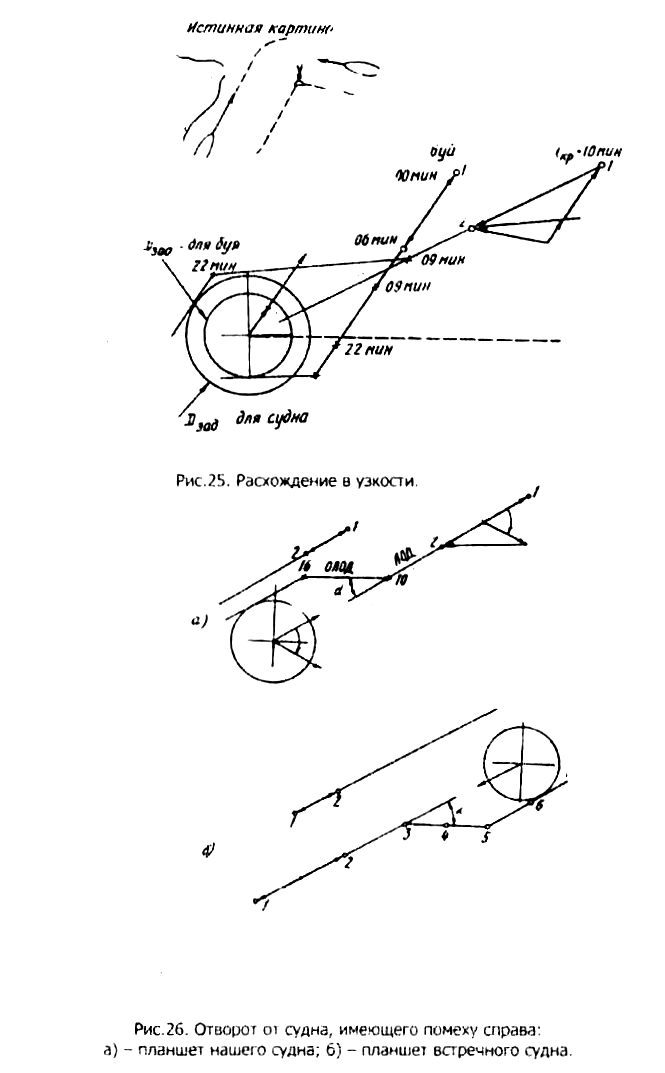
В ситуации на рис. 25 время плавания до точки поворота на следующий курс больше величины tкp., т. е. необходимо сначала выполнить маневр для расхождения, а уже потом — навигационный поворот. Поскольку очевидно, что маневр изменением курса в данных! обстоятельствах неэффективен, лучшим решением будет резкое снижение скорости.
Одновременно можно сделать вывод о том, что скорость нашего судна при подходе к повороту не была безопасной. Кроме того, наше судно не проявило должного внимания и осторожности при подходе к изгибу фарватера, и другое судно было обнаружено в опасной близости.
В узкости, где весьма вероятно появление судов на носовых курсовых углах, для расхождения с такими судами предпочтительнее маневр курсом. Маневр скоростью в таких ситуациях приведет только к изменению tкp., но не к расхождению. Если отворот будет предпринят сразу же после оценки ситуации и вправо при отсутствии какого-либо объекта на траверзе или позади траверза, весьма вероятно, что другое судно сохранит свой курс и скорость неизменными. Таким образом, инициатива в действиях не приведет к усложнению ситуации.
3.5. Нередко судоводитель, имея помеху справа, при решении задачи на расхождение с 1 встречным судном даже не пытается рассчитать отворот вправо, а сразу же отворачивает влево. (Особенно часто это бывает, если радиолокационная прокладка не ведется.)
Эти неблагоприятные действия можно упредить заблаговременным маневром нашего судна, расчет которого показан на рис. 26.
Из рисунка видно, что эффективность маневра достигается разумным выбором при расчете tynp и более значительным углом .
4. Обгон.
Обгон — сложная операция. Наиболее ответственным при обгоне является момент подхода к траверзу обгоняемого судна из-за возможного его отворота в нашу сторону по самым различным причинам.
Выполнять обгон следует энергичным маневром. При выполнении обгона следует:
-
выбирать участок пути, свободный от навигационных опасностей, в том числе сужений и фарватера;
-
выполнять обгон только при условии, что по курсу обгоняемого судна нет объектов, которые могут вызвать его отворот в нашу сторону;
-
рассчитывать время прохождения траверза обгоняемого судна;
-
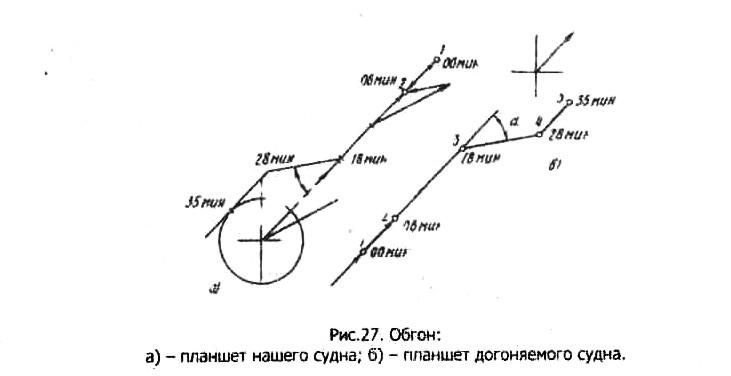
выбирать дистанцию обгона не менее двух-трех диаметров своей циркуляции и рассчитывать угол а между ЛОД и ОЛОД таким (рис.27, а), чтобы маневр был заметен для обгоняемого;
-
выходить на курс обгона задолго до траверза обгоняемого судна, чтобы заблаговременно обозначить свои намерения.
Правильный расчет обгона обеспечит четкое представление обо всех этапах нашего маневра у судоводителей обгоняемого судна,
которые будут наблюдать за обгоняющим судном по РЛС (рис.27,6).