

Радиолокационная прокладка.
Радиолокационная прокладка (ручная или автоматизированная) представляет собой графоаналитический метод обработки радиолокационной информации при решении задачи расхождения судов.
Различают истинную и относительную радиолокационные прокладки.
Истинная прокладка обычно выполняется на навигационной карте. От счислимых мест своего судна откладывают измеренные пеленг и дистанцию цели, получая ее одномоментные местоположения. По ним определяют курс и скорость цели, а также путем более сложных построений Dкр. и tкр. для оценки степени опасности столкновения.
Относительная прокладка выполняется на радиолокационном маневренном планшете, на накладном зеркальном планшете, которым оборудованы некоторые модели РЛС, в также во всех САРП (в САРП, как правило, в сочетании с истинной прокладкой).

Относительная прокладка выполняется следующим образом:
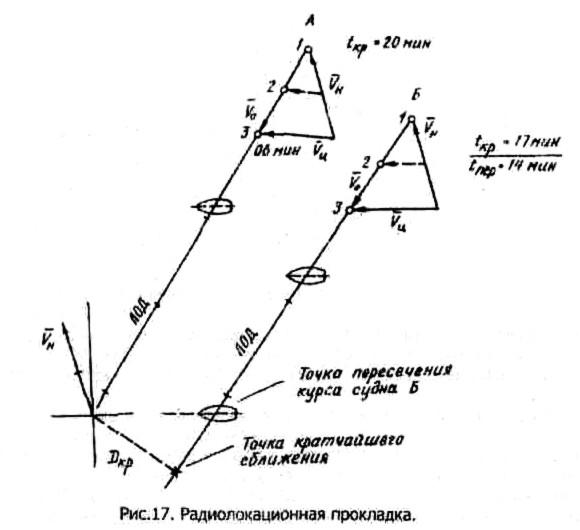
а) на маневренный планшет наносится начальная ситуация (рис. 17):
положение цели (целей) на начальный момент времени по первым измерениям пеленга и дистанции;
положение цели (целей) через избранный интервал времени (обычно 3 или 6 мин) по вторым измерениям пеленга и дистанции и, если позволяют обстоятельства;
положение цели (целей) через тот же интервал времени по третьим измерениям пеленга и дистанции (последние измерения должны предупредить промах);
б) параллельно с нанесением начальной ситуации начинают обработку радиолокационных измерений на планшете: уже после получения первого положения цели — точки 1 наносят вектор нашей скорости VH за соответствующий период времени;
через точки 1-2-3 после их нанесения проводят ЛОД цели. Соединяют точки 1 - 3, получая вектор относительной скорости V0 — основной информационный элемент;
соединив начало вектора нашей скорости с точкой 3, определяют вектор скорости цели Уц, т. е. завершают решение векторного треугольника (векторы VH, V0 и Vц должны быть за одинаковый интервал времени);
в) получают данные для оценки ситуации: Dкp. определяют по длине перпендикуляра из центра планшета на ЛОД;
tкр. рассчитывают, откладывая по ЛОД отрезки, равные V0, так как они соответствуют интервалу времени 1-3;
если ЛОД проходит у нас по носу, определяют точку пересечения целью нашего курса, а если ЛОД проходит у нас по корме, — точку пересечения нашим судном курса цели (из центра планшета проводят линию, параллельную Vц, до пересечения с ЛОД);
tnep. рассчитывают аналогично tкр. до точки пересечения курса;
курс цели Кц Определяют по направлению вектора ее скорости, а скорость цели Vц — повеличине вектора Vц;
Таблица 1.
|
1
2
3
|
Т |
кн |
УН |
А
|
Б
|
|
|
||||
|
п/ку
|
D
|
п/ку
|
D
|
п/ку
|
D
|
п/ку
|
D
|
||||
|
0610
|
345
|
16,0
|
32
|
7,3
|
48
|
7.6
|
|
|
|
|
|
|
0613 |
345
|
16,0
|
32
|
6,5
|
50
|
6.7
|
|
|
|
|
|
|
0616
|
345
|
16,0
|
32
|
5,7
|
53
|
56
|
|
|
|
|
|
г) получив необходимые данные и используя линейные и временные факторы опасности (см. схему на рис. 1), оценивают ситуацию: определяют, имеется ли реальная или потенциальная опасность столкновения с каждой целью, и, если опасность существует, переходят к выбору и обоснованию маневра. На этом этапе должно быть определено, с кем следует расходиться, что для этого нужно сделать и когда выполнять маневр. Выбор и обоснование маневра будут рассмотрены ниже. Пока же достаточно отметить, что при этом учитывают условия и обстоятельства конкретного случая, требования МППСС-72, закономерности перемещения эхо-сигналов на экране РЛС и маневренные элементы своего судна;
д) для расчета выбранного маневра (по судну Б на рис. 18):
наносят на ЛОД упрежденную точку 1, соответствующую условному моменту окончания маневра (12 мин.);
проводят окружность радиусом заданной дистанции кратчайшего сближения Dзад.; прокладывают ожидаемую линию относительного движения цели (ОЛОД),
Таблица 2.
|
4
5 |
т
|
Кн |
VH |
А |
Б |
|
|
||||
|
п/ку |
D |
п/к |
D |
п/ку |
D |
п/ку |
I |
||||
|
0619 |
345 |
16,0
|
32 |
4,9 |
56 |
5,0 |
|
|
|
|
|
|
0621 |
|
п/Б |
курс
|
64,0 |
|
|
|
|
|
|
|
|
0623 |
64 |
16,0 |
28 |
4,6 |
59 |
4,6 |
|
|
|
|
|

которая представляет собой касательную к окружности Dзад., проведенную из упрежденной точки 1; из точки 3 векторного треугольника начальной ситуации проводят новое направление вектора V’0 — оно всегда соответствует направлению ОЛОД — и делают на нем засечку величиной VH определяя точку начала нового вектора относительной скорости V’0, новое положение вектора VH, а также точное значение угла отворота, если выбран маневр изменением курса.
Если же выбрано уменьшение скорости, новое значение вектора V’H определится отрезком V’H до пересечения этого вектора с вектором V’0.
Из рис. 18 видно, что возможен и комбинированный маневр: из центра планшета проводят новый вектор V'H, одновременно зачеркивая, чтобы не путаться, старый вектор VH;
е) пригодность рассчитанной величины маневра для расхождения с другими целями на безопасной дистанции проверяется (на рис. 18 по судну А) следующим образом: прокладывают новое значение V'H в векторном треугольнике каждой цели и упрежденную точку на всех ЛОД;
определяют новое значение V’0;
через упрежденную точку параллельно V’0 проводят ОЛОД и оценивают величину дистанции кратчайшего сближения, которая должна быть не меньше Dзад.;
ж) рассчитывают время расхождения tpacx. и дистанцию отхода от первоначального пути Dотх., используя новое значение V0:
находят упрежденную точку 2 условного момента возвращения на первоначальный путь следования (21 мин), для чего проводят касательную к окружности Dзад. параллельную ЛОД, и точку пересечения этой касательной с ОЛОД, которая и есть упрежденная точка 2;
рассчитывают tpacx., откладывая величину V0 по ОЛОД до упрежденной точки 2;
определяют Dотх., для чего по линии нового курса V’H откладывают расстояние, которое пройдет наше судно за время tpacx. Из конечной точки этого плавания опускают перпендикуляр на линию первоначального курса — он и есть Dотх. ;
з) рассчитывают момент начала маневра с учетом маневренных элементов своего судна вычитают из условного момента упрежденной точки (п. 2.4.4д) 2/з известного из Таблиц маневренных элементов времени маневра.
Радиолокационная прокладка на зеркальном планшете аналогична прокладке на маневренном планшете.
На поверхности зеркального планшета специальным карандашом-стеклографом отмечают через избранный интервал времени положения эхо-сигналов целей. Дальнейшие графические построения выполняют в полном соответствии с изложенным выше.
Принципиальные достоинства зеркального планшета: радиолокационное наблюдение, глазомерную оценку ситуации и графическую прокладку выполняет один человек; исключается необходимость выполнения радиолокационных измерений и переноса этих измерений на планшет, с чем связана возможность промаха.
Принципиальными недостатками зеркального планшета являются: параллакс; некоторая потеря качества изображения в зеркальном отражении;
отрыв нанесенной прокладки от реальных эхо-сигналов при переключении шкал дальности РЛС.