

2.Кинематические характеристики гребных винтов.
В
действительности винт за один оборот
проходит вдоль оси расстояние
 меньше шагаН.
Расстояние
меньше шагаН.
Расстояние
 называетсялинейной
поступью винта,
а разность Н-
называетсялинейной
поступью винта,
а разность Н- –линейным
скольжением.
–линейным
скольжением.
Пусть
гребной винт вращается с частотой n
и перемещается вдоль оси со скоростью
 .
Тогда его линейная
поступь
будет равняться :
.
Тогда его линейная
поступь
будет равняться :

Эту величину выражают в долях диаметра винта и называют относительной поступью

а скольжение выражают в долях шага винта:

3.Динамические характеристики гребного винта.
Запишем формулы для упора P и момента M, развиваемого винтом в виде:


Где
 ,
(
,
( -плотоность
забортной воды;
-плотоность
забортной воды;
n - частота вращения гребного винта;
D- диаметр гребного винта.
Мощность, потребляемая гребным винтом, Np равна:

Где
 –окружная скорость гребного винта.
–окружная скорость гребного винта.
Полезная
мощность,
производимая винтом, равна
 ,
поэтому коэффициент
полезного действия винта
,
поэтому коэффициент
полезного действия винта
 найдем из выражения:
найдем из выражения:

В
этих формулах
 называетсякоэффициентом
упора,
а
называетсякоэффициентом
упора,
а
 -коэффициентом
момента.
Графическое представление
-коэффициентом
момента.
Графическое представление
 ,
,
 и
и
 в зависимости от
в зависимости от
 называетсякривыми
действия винта
или его динамическими
характеристиками
(рис. 5.10.)
называетсякривыми
действия винта
или его динамическими
характеристиками
(рис. 5.10.)
Рис
5.10..Кривые действия гребного винта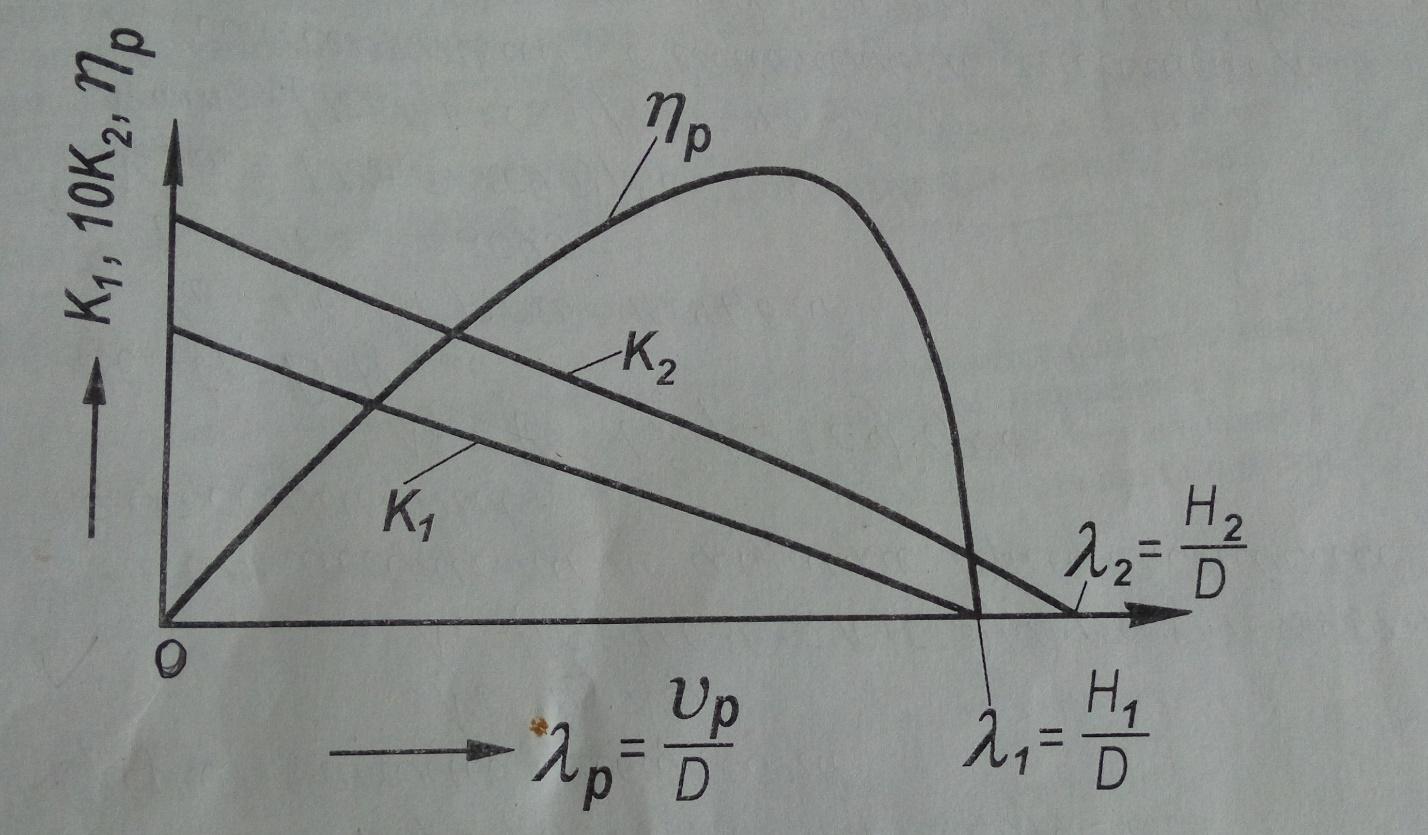
5.4. Режимы работы гребного винта.
0 - винт вращается, но не перемещается вдоль оси. Этот режим наз
Рассмотрим некоторые характерные режимы работы гребного винта.
 =
0 наывается
режимом
работы винта на швартовах.
В этом случае
=
0 наывается
режимом
работы винта на швартовах.
В этом случае
 и
и будут наибольшими , так как углы атаки
элементов будут наибольшими . Упор и
момент имеют наибольшие величины ,
(КПД)
будут наибольшими , так как углы атаки
элементов будут наибольшими . Упор и
момент имеют наибольшие величины ,
(КПД)
 =0,т.к.
нет перемещения винта .
=0,т.к.
нет перемещения винта .С увеличением
 углы
атаки лопастей уменьшаются , что приводит
к падению упора и момента и , соответственно
,
углы
атаки лопастей уменьшаются , что приводит
к падению упора и момента и , соответственно
,
 и
и . При некоторой поступи
. При некоторой поступи упор винта и
упор винта и обращаются
в нуль . Работа гребного винта в режиме
плавания при поступи , находящейся в
пределахот
обращаются
в нуль . Работа гребного винта в режиме
плавания при поступи , находящейся в
пределахот
 =0 до
=0 до =
= , т.е.
в промежутке от режима на швартовых до
режима нулевого упора
называется
обычным режимом плавания
.
, т.е.
в промежутке от режима на швартовых до
режима нулевого упора
называется
обычным режимом плавания
. =0;
=0;
 =0;
=0; =0;
=0; >0.
Этот режим называется
режимом нулевого упора.
Он наступает, когда подъемная сила
лопасти будет настолько малой, что
только уравновесит отрицательную
составляющую упора от лобового
сопротивления. Линейная поступь винта
в этом режиме называется
шагом
нулевого
упора
>0.
Этот режим называется
режимом нулевого упора.
Он наступает, когда подъемная сила
лопасти будет настолько малой, что
только уравновесит отрицательную
составляющую упора от лобового
сопротивления. Линейная поступь винта
в этом режиме называется
шагом
нулевого
упора
 ,
обычно
,
обычно
 >
> .
Отношение
.
Отношение
 есть гидродинамическое
шаговое отношение.
При еще большей поступи обращается в
нуль момент на винте.
есть гидродинамическое
шаговое отношение.
При еще большей поступи обращается в
нуль момент на винте. =0;
=0; <0
и
<0
и <0.
Это
режим нулевого момента.
Линейная поступь винта в этом режиме
называется
шагом нулевого момента
<0.
Это
режим нулевого момента.
Линейная поступь винта в этом режиме
называется
шагом нулевого момента
 , обычно
, обычно >
> .
.шаговое отношение. При еще большей поступи обращается в нуль момент на винт (зона параля).
.9. При еще большей поступи упор и момент будут отрицательными. Это будет работа винта в режиме турбины (например, вертушечный лаг или свободно вращающийся гребной винт у многовального судна). Схемы скоростей и сил на различных режимах работы винта приведены на рис.5.11. .

Рис 5.11. Схемы многоугольников скоростей и сил при специальных режимах работы гребного винта : а – швартовый режим; б – винт-движитель; в – режим нулевого упора; г – режим нулевого момента; д – зона параля ; ж – режим турбины.