

литература / Sharapov_V._Datchiki
.pdfГлава 12. Датчики и приборы для измерения механических величин
несколько разновидностей: вес определяется при устойчивом положении равновесия и регулируемой образцовой массой т0, значение которой изменяется путем определенного набора гирь (рис. 12.4, а), или с неизменной образцовой массой и переменной точкой ее приложения (изменением длины измерительного плеча коромысла, рис. 12.4, б ).
а) |
б) |
Рис. 12.4. К принципу действия механических весов
Рис. 12.5 схематически объясняет принцип действия электродинамических силокомпенсирующих весов. При отсутствии измеряемой массы подвижный элемент 1 занимает положение, при котором освещенность двух идентичных фоторезисторов, которые являются элементами моста постоянного тока, одинакова, измерительный мост будет уравновешенным, а исходное напряжение моста будет равняться нулю.
Рис. 12.5. Электродинамические силокомпенсирующие весы
12.2. Датчики и приборы для измерения массы
Сила притяжения, создаваемая измеряемой массой тх, приводит к смещению подвижного элемента 1, что ведет к изменению степени освещенности, а следовательно и разного по значению изменения сопротивлений фоторезисторов измерительного моста. Условие равновесия нарушается. На выходе моста возникает напряжение разбаланса, которое усиливается электроусилителем ЭУ и через обмотку 2 протечет электрический ток. В результате взаимодействия тока в обмотке с полем постоянного магнита 3 возникает компенсирующая сила, направленная против силы притяжения измеряемой массы.
Электродинамические весы — это в большинстве случаев прецизионные средства измерения массы. Они отличаются широким диапазоном измерений (от миллиграмма до нескольких килограмм), чрезвычайно высокой точностью.
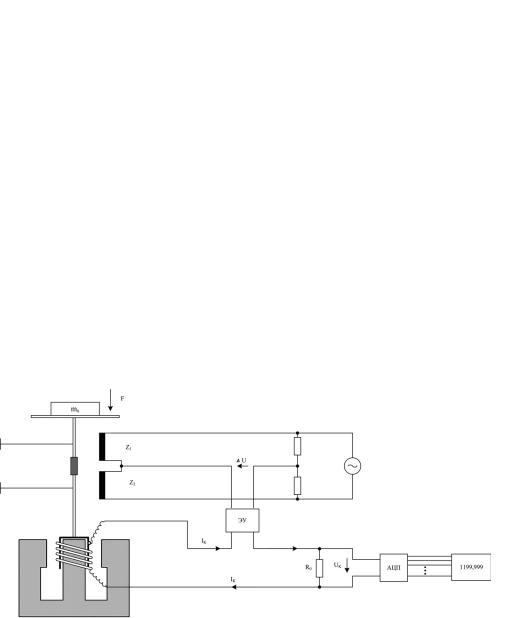
Принципы работы электродинамических весов поясняет рис. 12.6. При отсутствии измеряемой массы (силы притяжения) подвижный ферромагнитный сердечник дифференциального индуктивного преобразователя занимает положение, при котором комплексные электрические сопротивления Z1 и Z2 измерительных обмоток преобразователя будут одинаковыми. Мост находится в состоянии равновесия, следовательно, будет равняться нулю напряжение разбаланса ДU. Под действием силы притяжения массы тх подвижный сердечник смещается, при этом изменяются сопротивления Z1 и Z2. Мост выходит из состояния равновесия и появляется напряжение разбаланса ДU.
Рис. 12.6. Схема измерительной цепи электродинамических весов уравновешивающего преобразования
Выпрямленное и усиленное электронным усилителем напряжение подается на вход обратного магнитоэлектрического преобразователя. В результате взаимодействия тока в компенсирующей обмотке с полем постоянного магнита образуется компенсирующая сила, направленная встречно силе притяжения. При равенстве измеряемой силы притяжения компенсирующей силе значения компенсирующего тока Iк будет мерой измеряемой силы притяжения, а выходным измеряемым прибором обычно является цифровой вольтметр, который измеряет падение напряжения на образцовом сопротивлении R0.
Глава 12. Датчики и приборы для измерения механических величин
Интерферометрические методы измерения массы
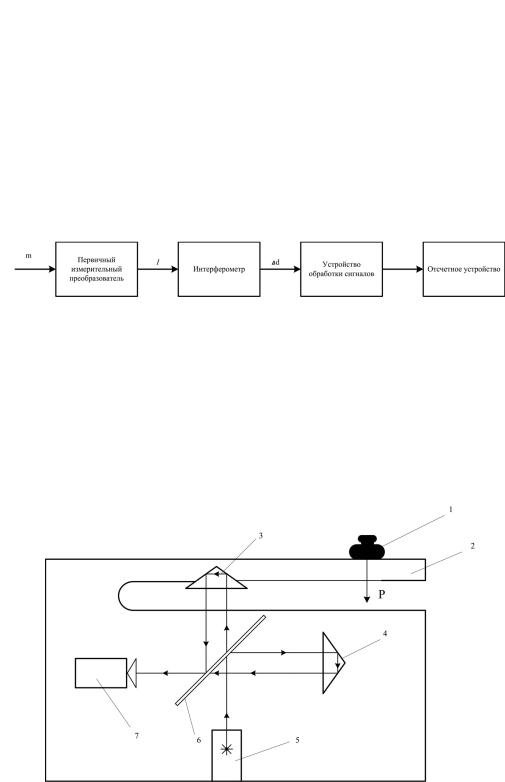
При точных взвешиваниях малых масс, в частности, в фармацевтической, ювелирной промышленности, чаще всего используются методы оптической интерферометрии, поскольку они обеспечивают нанометрическую точность и соответствующую разрешающую способность взвешивания. При этом масса с помощью соответствующих первичных преобразователей преобразуется в перемещение, которое влияет на фазу интенсивности лазерного света в плоскости экрана, а после прорабатывания интерферометрической картинки значения измеряемой величины освещается индикатором (отсчетным устройством) (рис. 12.7) [12].
Рис. 12.7. Структурная схема средства взвешивания массы
Первичный преобразователь выполнен в виде консольно закрепленной пластины 2 (плоской пружины из кварцевого стекла), свободный конец которой может перемещаться под действием внешней силы, например, веса взвешиваемой массы 1. Чувствительность такой пружины составляет 0,04 мм/г. Для достижения разрешающей способности по массе, равной 0,1 мг, необходимо обеспечить разрешающую способность по перемещению — 4 нм. Такие возможности созданы миниатюрным интерферометром (рис. 12.8). Разрешающая способность этого интерферометра — 1 нм.
Рис. 12.8. Структура интерферометрического преобразователя

12.3. Датчики давления и разницы давлений
Измерительный отражатель 3 интерферометра вмонтирован в пластину 2, потому он может двигаться под действием нагрузки 1. Опорный отражатель 4 является неподвижным. Источником монохроматического излучения служит лазер 5. Его световой поток расщепляется полупрозрачным зеркалом 6 на две части, каждая из которых направляется к отражателю 3 и 4 соответственно. Результирующее излучение воспринимается приемником 7. Следовательно, под действием массы т пружина 2 в точке ее приложения испытывает смещение lп, которое в месте установления отражателя 3 пропорционально отношению Lb/Ln расстояний от точки приложения массы до точки закрепления пластины Ln и от точки установления отражателя до точки закрепления пластины Lb [12].
Это, в свою очередь, создает отличие Дd между путями прохождения лучей — опорного и измерительного, а следовательно, изменение фазы колебаний светового луча.
В устройстве обработки сигналов оптические сигналы с помощью фотодиодов преобразуются в электрические, усиливаются, преобразуются в цифровую форму. Цифровой фильтр выделяет информативный параметр сигнала. После демодулирования в отсчетном устройстве получаем показание, которое отвечает взвешенной массе.
Микроконтроллер обеспечивает соответствующее масштабирование и коррекцию измерительной информации. Недостатком этих весов является их чувствительность к механическим вибрациям, влияние которых несколько уменьшается благодаря использованию цифрового фильтрования [12].
12.3. Датчики давления и разницы давлений
Широкий диапазон измеряемых давлений — от частиц Па до почти 1010 Па обусловил и большое разнообразие методов и средств их измерений. Значительная часть методов основана на предварительном преобразовании давления в механическое напряжение, деформацию или перемещение, с помощью упругих преобразовательных элементов с последующим измерением механического напряжения, деформации или перемещения. В других средствах используются физические эффекты, которые дают возможность непосредственно преобразовывать измеряемое давление в электрическую величину, например, в заряд, как в пьезоэлектрических манометрах, или в изменение исходного электрического сопротивления в результате барического тензоэффекта [11—13].
В зависимости от характера и значения измеряемого давления все приборы для измерения давления с общим названием манометры разделяются на такие группы:
•барометры — приборы, которые предназначены для измерений атмосферного давления;
•манометры избыточного давления — приборы, которые предназначены для измерений давления выше атмосферного, а фактически — разницы между абсолютным и атмосферным давлениями;
•вакуумметры — приборы, предназначенные для измерений давления ниже атмосферного;

Глава 12. Датчики и приборы для измерения механических величин
•дифференциальные манометры — приборы, которые предназначены для измерений разницы двух давлений, ни одно из которых не является атмосферным давлением.
По принципу действия манометры разделяют на:
•жидкостные манометры — приборы, в которых измеряемое давление уравновешивается давлением столба жидкости соответствующей высоты;
•механические деформационные манометры — приборы, в которых измеряемое давление определяется по размеру деформации разных упругих чувствительных элементов или по силе, которую они развивают, и имеют механические отсчетные устройства;
•электромеханические манометры — приборы, в которых измеряемое давление предварительно превращается в деформацию упругого чувствительного элемента, или перемещение его незакрепленной части с последующим превращением этих величин в электрические величины с использованием тензорезистивных, емкостных, индуктивных, взаимоиндуктивных, пьезоэлектрических и других вторичных преобразователей;
•электрофизические манометры, принцип действия которых основан на зависимости электрических параметров (сопротивление, емкость, электропроводимость и др.) манометрического преобразователя от измеряемого давления.
В манометрах с гидродинамическим уравновешиванием мерой измеряемого давления является высота столба рабочей, так называемой манометрической, жидкости. Ею может быть дистиллированная вода, ртуть, этиловый спирт, трансформаторное масло и др. Выбор рода жидкости определяется диапазоном измерений, условиями эксплуатации, необходимой точностью измерений.
Широкое применение в промышленности приобрели механические деформационные манометры. Они просты конструктивно, надежны и имеют относительно высокую точность.
Для передачи перемещения упругого чувствительного элемента к стрелке манометра в таких приборах используются зубчатые передаточные механизмы.
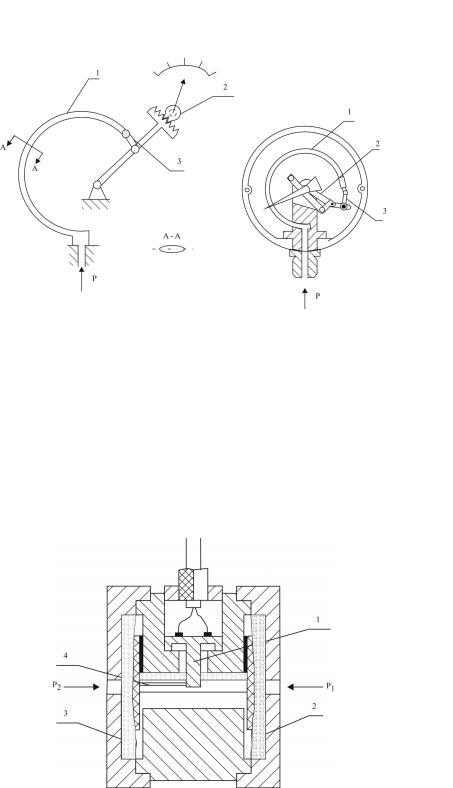
На рис. 12.9 показаны конструкции манометра с секторным передаточным механизмом. Первичным преобразователем здесь является одновитковая трубчатая пружина (трубка Бурдона) 1. Перемещение свободного конца пружины, вызванное измеряемым давлением, через тягу 3 передается передаточному механизму 2, соединенному с указателем (стрелкой) отсчетного устройства.
Предельные номинальные значения измеряемого давления таких манометров находится в пределах от 0,1 до 160 МПа. Наивысший класс точности — 0,5.
Для работы в системах автоматического контроля абсолютного, избыточного или гидростатического давления, а также разницы давлений двух исследуемых сред и их преобразования в унифицированный выходной сигнал, промышленностью выпускается свыше 20 моделей измерительных преобразователей типа «Сапфир». Диапазон преобразуемых давлений этих преобразователей находится в пределах от 0,25 кПа до 100 МПа с допустимыми основными погрешностями 0,25; 0,5 или 1 % и нормируемым исходным током 0...5 мА, 0...20 мА и 4...20 мА.
12.3. Датчики давления и разницы давлений
Рис. 12.9. Конструкция манометров с одновитковой трубчатой пружиной
На рис. 12.10 показана конструкция тензорезистивного датчика разницы давлений типа «Сапфир». Датчик имеет первичный мембранно-рычажный преобразователь разницы давлений 1, разделительные мембраны 2 и 3, соединенные между собой и с концом рычага первичного преобразователя с помощью тяги 4. Действие измеряемой разницы давлений Р1 > Р2 приводит к перемещению тяги и, соответственно, конца рычага, деформации мембраны, из монокристаллического сапфира, на внешнюю поверхность которой нанесена тензочувствительная гетероэпитаксиальная пленка кремния (см. гл. 7). Тензорезисторы через герметический вывод подсоединяются ко вторичному преобразователю, который входит в состав «Сапфира» и служит для преобразования изменения сопротивления тензорезисторов в выходной унифицированный сигнал.
|
+ |
Рис. 12.10. Датчик разности давления типа «Сапфир»

Глава 12. Датчики и приборы для измерения механических величин
В емкостных преобразователях давления чувствительными элементами, которые преобразуют измеряемое давление в перемещение, являются мембраны. Одновременно они могут быть использованы в качестве подвижных электродов. Емкостные преобразователи обычно имеют верхнюю границу (200...800) Па при чувствительности (0,5...1,0) пФ/Па и начальной емкости (10...20) пФ. Основная их погрешность составляет (1...2)%.
Для измерений давления с предварительным его преобразованием в перемещение широко применяются вторичные приборы с дифференциально трансформаторными измерительными цепями, как указывающие типа КПД, так и самопишущие типа КСД [11, 12].
12.4.Преобразователи крутящих моментов (торсиометры)
Приборы для измерений крутящих моментов называются торсиометрами. Для измерения крутящих моментов чаще всего используют методы, основанные на преобразовании крутящего момента в деформацию (механические напряжения) упругого элемента, выполненного в виде сплошного или полого вала (торсиона), спиральных пружин, подвесов или растяжек. Деформация (механическое напряжение) упругого элемента преобразуется в электрический сигнал с помощью тензорезистивных, индуктивных, магнитоупругих и других преобразователей.
Тангенциальное напряжение ф на поверхности сплошного вала, который находится под действием крутящего момента Мкр, связано с последним зависимостью
|
2 M кp / W p , |
где W P |
<R 3 |
— полярный момент сопротивления круглого вала радиусом R. |
|
|
2 |
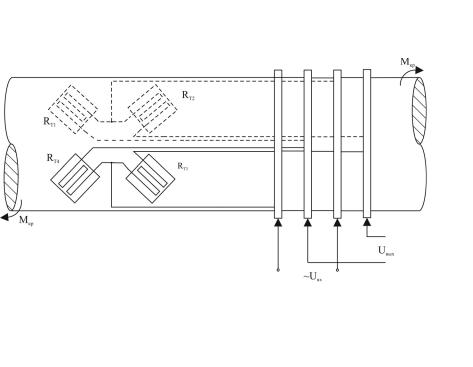
Для измерений тангенциальных напряжений можно использовать тензорезисторы, наклеенные непосредственно на валах исследуемых объектов, а если это невозможно, — на упругих элементах, соединенных с рабочим валом (рис. 12.11). Тензорезисторы наклеивают в направлении наибольших тангенциальных напряжений, то есть под углом 45° к оси вала. В этом случае чувствитель-
ный элемент тензорезистора будет испытывать деформации
2 , 2G
где G — модуль сдвига материала исследуемого вала.
Размещением тензорезисторов под углом 45° к оси вала и под углом 90° друг к другу, а также попарно на диаметрально противоположных сторонах вала, как показано на рис. 12.11, с последующим соединением их в схему одинарного моста обеспечивается не только температурная компенсация, но и устраняется влияние деформации изгиба вала на результат измерений.
Если используют четыре тензорезистора, которые попарно воспринимают деформацию разных знаков, исходное напряжение мостовой цепи [12, 13]:
U вых U вх k U вх k |
2 |
U вх k |
8M кp |
, |
|
2G |
<D2 G |
||||
|
|
|
12.4. Преобразователи крутящих моментов (торсиометры)
Рис. 12.11. К измерениям крутящих моментов вращающихся валов
откуда
M КР <D3GU вых , 8kU вх
где k — коэффициент относительной тензочувствительности тензорезистора. Одним из важных элементов торсиометра для измерения крутящих момен-
тов вращающихся валов является токосъемник, который соединяет тензорезисторы с электрической измерительной цепью. Его изготовляют в виде контактного кольца, насаженного на вал, и контактных щеток (рис. 12.11). Значительное влияние на результат измерений в таких случаях могут иметь флуктуации переходных сопротивлений контактов и контактные термоЭДС, которые возникают в результате нагревания контактов из-за трения в них. Для уменьшения этого влияния кольца и щетки изготовляют из материалов, которые в паре имеют малое переходное сопротивление и малую термоЭДС, а также применяют другие схемные решения. Например, если четыре тензорезистора соединить в замкнутое кольцо, а токоснимающие кольца подсоединить к вершине моста, тогда сопротивления контактов будут добавляться лишь к сопротивлениям источника питания и индикатора, а их влияние на результат измерений будет незначительным. Для устранения влияния паразитных контактных термоЭДС измерительную цепь питают от источника переменного напряжения.
Схема бесконтактного торсиометра для измерений крутящего момента вращающихся валов показана на рис. 12.12. На валу 1 четыре тензорезистора RT, размещенные попарно с двух сторон вала, образуют тензорезистивный мост. Питание мостовой цепи и подключеного к его выходу преобразователя напря- жение—частота (ПНЧ) 2 осуществляется от блока питания 3 через трансформатор 4 с подвижной вторичной обмоткой, которая находится на подвижном валу. Первичная обмотка w1 трансформатора подключена к источнику 5 синусоидного напряжения с частотой 5...10 кГц. В течение полупериода выходного напряжения ПНЧ, когда ключ S разомкнутый, напряжение, которое наводит-
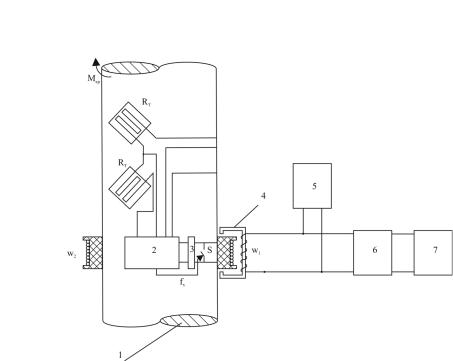
Глава 12. Датчики и приборы для измерения механических величин
Рис. 12.12. Схема бесконтактного торсиометра
ся во вторичной обмотке трансформатора, выпрямляется, стабилизируется и подается на тензометрический мост. Напряжение разбаланса моста поступает на вход ПНЧ, который служит для преобразования напряжения разбаланса в пропорциональную ему частоту fх.
Сигнал с выхода ПНЧ в виде частотно модулированного переменного напряжения управляет ключом S, который с частотой fх замыкает и размыкает вторичную обмотку w2 трансформатора, вызывая модуляцию напряжения на обмотке w1. Это напряжение после амплитудного демодулятора 6 подается на аналоговый или цифровой частотомер 7. Для несущей частоты 5 кГц чувствительность прибора к относительному изменению сопротивления тензорезисторов составляет Д fх /е = 5000 Гц % [13].
Погрешность измерения крутящих моментов с помощью наклеенных тензорезисторов может быть доведена до (1...1,5) % при предварительном градуровании измерительного прибора с наклеенными тензорезисторами. Без такого градуирования погрешность может достигать (5...10) %.
При измерении больших крутящих моментов (например, на валах буровых элементов) применяют магнитоупругие трансформаторные преобразователи, в которых в качестве магнитоупругого элемента, магнитная проницаемость которого изменяется с изменением механических напряжений (крутящего момента), используется сам стальной вал. Преимуществом такого метода является то, что намагничивающая и измерительная (вторичная) обмотки преобразователя размещены на неподвижном статоре, чем обеспечивается высокая надежность устройства. Погрешность измерения крутящих моментов с помощью серийных приборов такого типа не превышает 1,5 % [13].
12.4. Преобразователи крутящих моментов (торсиометры)
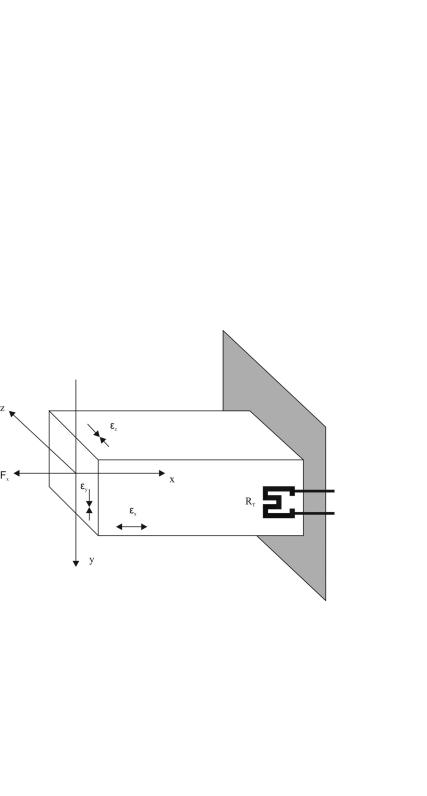
Для измерения механических напряжений чаще всего используются металлические или полупроводниковые тензорезисторы (см. гл. 7) по схемам, аналогичным измерению усилий. Для схемы, изображенной на рис. 12.13, при однородном объемнонапряженном состоянии изотропного материала в пределах упругих деформаций, можно по измеренным значениям главных деформаций ех, еу, еz определить главные напряжения ух, уу и уz, использовав уравнения связи:
x |
|
1 |
|
|
[> x (> y > z )]; |
|
||
|
|
|
|
|||||
|
|
|
|
E |
|
|||
y |
|
1 |
|
[> y > x > z ]; |
(12.6) |
|||
|
|
|||||||
|
|
|
|
E |
|
|||
z |
|
1 |
[> z > x > y ], |
|
||||
|
|
|||||||
|
|
|
|
E |
|
|||
где Е — модуль упругости; μ — коэффициент Пуассона.
Рис. 12.13. К определению механических напряжений
Для плосконапряженного состояния, когда, например, уz = 0, уравнения (12.6) принимают вид:
x |
|
1 |
|
(> x > y ); |
|
|||
|
|
|
|
|||||
|
|
|
E |
|
||||
y |
|
1 |
(> y > x ); |
(12.7) |
||||
|
|
|||||||
|
|
|
E |
|
||||
z |
|
1 |
> x > y , |
|
||||
|
|
|||||||
|
|
|
|
E |
|
|||