

литература / Sharapov_V._Datchiki
.pdfГлава 10. Электромагнитные преобразователи
ное изменение воздушного промежутка может привести к значительно большему изменению магнитного сопротивления цепи, чем изменение, вызванное магнитоупругим эффектом.
Магнитоупругие преобразователи изготавливают обычно дифференциальными. В таких преобразователях один из магнитоупругих элементов является рабочим преобразователем измерительной силы F, а идентичный ему второй элемент, который не подвергается действию на него механических усилий, служит для компенсации начальной индуктивности рабочего преобразователя, а также для компенсации влияния внешних факторов, в частности температуры и частоты источника питания. При дифференциальном включении, например, в мостовую измерительную цепь, показания измерительного прибора будут практически линейной функцией измеряемой силы.
Одной из основных составных погрешностей магнитоупругих преобразователей является погрешность, определяемая магнитоупругим гистерезисом. Значение этой погрешности особенно большое (2...3) % при низких начальных напряжениях магнитного поля и уменьшается до (0,8...1) % при напряжениях, близких к Нmmax. Кроме этого, значительное влияние на значение этой погрешности имеет так называемая «механическая тренировка» чувствительного элемента. Неоднозначность функции преобразования во время первого цикла механической нагрузки и разгрузки может достигать 10 %. После «механической тренировки» она уменьшается до уровня 1% и в дальнейшем сохраняется неизменной. Механические напряжения в материале чувствительного элемента не должны превышать 0,15...0,20 предела упругой деформации.
Несмотря на сравнительно низкую точность (суммарная погрешность магнитоупругого преобразователя достигает (3...4 %), благодаря простоте конструкции магнитоупругие преобразователи широко применяются для преобразования больших механических усилий (105...106 Н) в сложных условиях эксплуатации (полевые условия, буровые колонки) [14, 15].
Взаимоиндуктивные магнитоупругие преобразователи могут быть двух разновидностей: преобразователи, в которых используется изменение магнитной проницаемости чувствительного элемента только в одном направлении и преобразователи, в которых используется изменение магнитной проницаемости чувствительного элемента в двух взаимоперпендикулярных направлениях. Последние называют магнитоанизотропными. Магнитоанизотропный преобразователь — это пакет пластин из трансформаторной стали, по диагоналям которого симметрично размещены четыре отверстия (рис. 10.10, а). Через соответствующие пары отверстий под углом 90° одна к другой проложены намагничивающая и измерительная обмотки, которые образуют углы 45° к направлению преобразуемого усилия F.
При отсутствии деформации силовые линии магнитного потока намагничивающей обмотки будут симметричными и не будут сцепляться с измерительной обмоткой (рис. 10.10, б). После приложения силы F в результате разного изменения магнитной проницаемости в направлении действия силы и в перпендикулярном к ней направлении силовые линии магнитного поля вытягиваются в направлении большей проницаемости и сжимаются в направлении меньшей, сцепляются с измерительной обмоткой (рис. 10.10, в) и индуктируют в ней ЭДС е2 = f(F).

10.6. Датчики Холла
а) |
б) |
в) |
Рис. 10.10. К принципу действия магнитоанизотропных преобразователей
Необходимо отметить, что из-за некоторой магнитной анизотропии при отсутствии деформации (силы) может индуктироваться начальная ЭДС. Для ее уменьшения в магнитопроводах из листового материала чередуют листы с взаимно перпендикулярными направлениями проката, используют дополнительные компенсирующие обмотки, специальные магнитные шунты и т.п.
10.6. Датчики Холла
Эффект Холла был открыт в 1879 г. Суть гальваномагнитного эффекта Холла можно объяснить так. Если через относительно длинную пластину (l >> b), выполненную из полупроводника, например, с n-проводностью, помещенную в магнитное поле (рис. 10.11), пропустить в направлении оси X электрический ток I, то на каждый электрон, который двигается внутри пластины, действует сила Лоренца. Если вектор индукции B нормален к плоскости пластины, то есть направленный вдоль оси Z, сила Лоренца равняется
Fl e0 vB, |
(10.28) |
где e0 — заряд электрона, v — средняя скорость движения носителей заряда в направлении линии тока.
Рис. 10.11. К принципу действия гальваномагнитного преобразователя Холла

Глава 10. Электромагнитные преобразователи
Гальваномагнитные эффекты сильне всего выражены в полупроводниках только с электронной или только дырочной проводимостью (германий, кремний, висмут, арсенид индия, арсенд галлия, селенид ртути, арсенид кадмия и другие), из которых и изготавливаются гальваномагнитные преобразователи.
Под действием этой силы электроны будут отклоняться к одной из продольных граней пластины, в результате чего их концентрация увеличится, а на противоположной грани — уменьшится. Это приведет к пространственному распределению зарядов и к появлению некоторой разницы потенциалов между гранями и, соответственно, к возникновению поперечной составляющей напряженности Еv электрического поля, которое называется напряженностью Холла. В результате на электрон начинает действовать, кроме силы Лоренца F1, сила электрического взаимодействия
F2 = e0 Ey. |
(10.29) |
Накопление зарядов на продольных гранях пластины будет продолжаться до тех пор, пока действие электрического поля Холла на заряды не уравновесит действие силы Лоренца. Условие равновесия будет иметь вид
Ev = vB. |
(10.30) |
Поскольку ток I, который протекает через прямоугольную пластину сечением b Ї d, связан со средней скоростью носителей заряда соотношением
|
Π |
I |
, |
|
|
(10.31) |
|||
|
e0 nbd |
|
|
||||||
|
|
|
|
|
|
|
|||
то выражение для Ev можно записать в виде: |
|
|
|
||||||
|
E y |
|
I |
B, |
|
(10.32) |
|||
|
e0 nbd |
|
|||||||
|
|
|
|
|
|
|
|||
откуда ЭДС Холла |
|
|
|
|
|
|
|
|
|
eh |
Ev b |
IB |
|
|
Rh |
IB, |
(10.33) |
||
e0 nd |
d |
||||||||
|
|
|
|
|
|
||||
где Rh 1 / (e0n) — коэффициент Холла, который зависит от природы материала чувствительного элемента (пластины); n — концентрация электронов, то есть их количество в единице объема.
Теоретически функция преобразования, то есть зависимость ЭДС Холла от индукции при заданном I = const, является линейной лишь для идеального полупроводника, безгранично длинного в направлении оси X и при ограниченных значениях индукции. Практически линейной можно считать функцию преобразования такого датчика, в котором отношение длины к ширине больше чем 2...3 и верхний предел диапазона преобразования за индукцией не превышает 1...5 Тл.
ЭДС Холла может быть постоянной или переменной в зависимости от того, в какое поле помещен датчик и каким током он питается. Если индукция исследуемого поля и ток питания постоянны, тогда eh — постоянная. Если индукция поля постоянная, а ток питания переменен (или наоборот), тогда eh будет переменной и той же частоты, что и частота переменной входной величины.
В полупроводниках с p-проводимостью при том же направлении тока и магнитного поля полярность ЭДС Холла будет противоположной полярности

10.6. Датчики Холла
ЭДС полупроводника с n-проводимостью, коэффициент Холла Rh = 1/(e0 p), где p — концентрация дыр.
В технических расчетах очень часто пользуются выражением для коэффициента Холла, записанного через подвижность носителей заряда, которая равняется отношению скорости v направленного движения носителей к напряженности Eх внешнего электрического поля, которое вызывает это движение:
= v / Eх. |
(10.34) |
Учитывая, что напряженность Ex связана с током I, который протекает через пластину, ее геометрическими размерами и удельным электрическим сопротивлением зависимостью
Ex bd
I
выражение для ЭДС Холла принимает вид
eh BI, d
а
Rh = .
(10.35)
(10.36)
(10.37)
Если гальваномагнитный преобразователь подключен к источнику напряжения (U = const), а не к источнику тока, то, выражая ток через прилагаемое напряжение, удельное электрическое сопротивление и площадь пересечения пластины, получим
eh |
b |
BU . |
(10.38) |
|
|||
|
l |
|
|
Как понятно из последнего выражения, ЭДС Холла пропорциональна при других одинаковых условиях подвижности носителей заряда и произведению BU.
Конструктивное выполнение и геометрические размеры датчиков Холла могут быть самыми разнообразными. Чаще всего они изготовляются в форме плоской четырехугольной пластины, к поперечным граням которой присоединяются сплошные электроды, которые служат для подведения электрического тока. К центрам продольных граней прикреплены так называемые холловские электроды, изготовленные в виде точечных контактов.
На рис. 10.12 приведены символы преобразователя Холла (рис. 10.12, а) и некоторые их конструктивные формы (рис. 10.12, б, в, г), а в табл. 10.1 основные характеристики некоторых преобразователей Холла.
а) |
б) |
в) |
г) |
Рис. 10.12. Символы и некоторые разновидности конструктивных форм преобразователей Холла

Глава 10. Электромагнитные преобразователи
Таблица 10.1. Основные характеристики некоторых типов датчиков Холла
|
|
Размеры |
Номи |
Сопротивление, Ом |
Удельная чув |
||
Тип |
Материал |
чувствительного |
нальный |
|
|
ствительность, |
|
токовой цепи |
выходное |
||||||
|
|
элемента, мм |
ток, мА |
В/(АТл) |
|||
|
|
|
|
|
|
|
|
Х-500 |
Фосфид индия |
0,8 Ї 0,5 Ї 0,1 |
100 |
0,7 |
7 |
0,6…1 |
|
Х-114 |
Германий |
8 Ї 4 Ї 0,25 |
50 |
18 |
30 |
8…12 |
|
ДХК-7С |
Кремний |
12 Ї 6 Ї 0,2 |
20 |
500 |
1000 |
45 |
|
Х-200 |
Арсенид индия |
0,8 Ї 0,5 Ї 0,1 |
130 |
0,5 |
5 |
0,6…1,3 |
|
|
|
|
|
|
|
|
|
На рис. 10.13 показано несколько способов использования элементов Холла в бесконтактных преобразователях положения (позиции). Преобразователи по схеме рис. 10.13, а имеют два возможных направления изменения положения. В обоих случаях функции преобразования, то есть eh = f(d) при х = const и eh = (x) при d = const, являются нелинейными. Поэтому такие датчики по большей части применяются в сигнализаторах предельного положения.
Преобразователи малых перемещений (рис. 10.13, б) могут быть выполнены с использованием одного датчика Холла или дифференциально включенных двух датчиков Холла. В таких преобразователях в качестве рабочей используется линейный участок функции преобразования.
а)
б)
Рис. 10.13. Структурные схемы и функции преобразования датчиков линейных и угловых перемещений

10.7. Магниторезистивные преобразователи
На рис. 10.14, а и б приведены структурные схемы и функции преобразования соответственно бесконтактных сигнализатора положения (преобразователя малых перемещений), а также счетчика оборотов (угла отклонения), с использованием дополнительного ферромагнитного тела.
а)
б)
Рис. 10.14. Структурные схемы и функции преобразования датчиков линейных
иугловых перемещений с дополнительным ферромагнитным телом
10.7.Магниторезистивные преобразователи
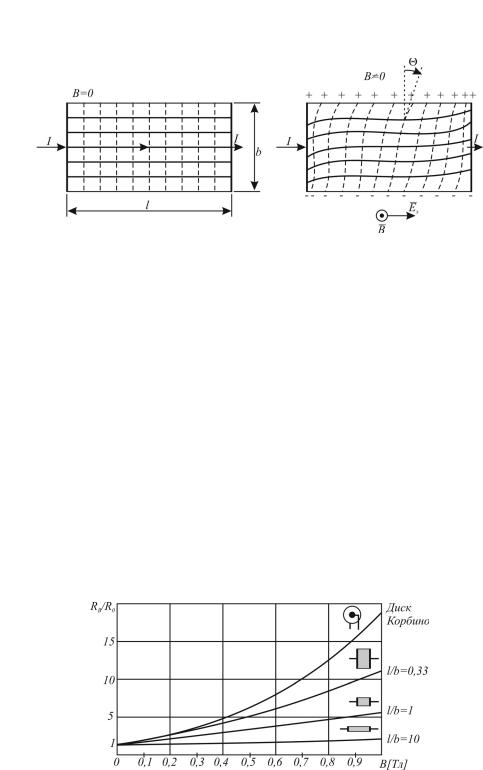
Магниторезистивный эффект, то есть эффект увеличения электрического сопротивления гальванического элемента, является результатом искривления траектории движения носителей заряда под действием магнитного поля. На рис. 10.15 показаны линии тока и эквипотенциальные линии в n-полупровод- нике при условии отсутствия внешнего магнитного поля (рис. 10.15, а) и в результате действия на гальваномагнитный элемент внешнего магнитного поля (рис. 10.15, б).
Глава 10. Электромагнитные преобразователи
а) |
б) |
|
Рис. 10.15. Линии тока и эквипотенциальные линии в n-полупроводнике при |
|
В = 0 и В ! 0 |
Количественно магниторезистивный эффект проявляется по-разному и зависит от материала гальванорезистивного элемента и его формы. В проводниковых материалах гальванорезистивный эффект проявляется слабо. Значительно сильнее он проявляется в некоторых полупроводниках.
С достаточной для практики точностью зависимость сопротивления магниторезистора RB от индукции В может быть записана в виде
RB = R0(1 + A 2B2),
где R0 — сопротивление магниторезистора при отсутствии магнитного поля, А — коэффициент, который зависит от формы магниторезистора, — подвижность носителей заряда, значение которых обратно пропорционально удельному электрическому сопротивлению и концентрации n электронов (носителей).
Характер зависимости относительного изменения сопротивления от индукции для разных форм магниторезистора демонстрирует рис. 10.16 [12]. Наибольшее относительное изменение сопротивления в магнитном поле имеют магниторезисторы, выполненные в форме так называемого диска Корбино.
Рис. 10.16. Зависимость относительного изменения сопротивления магниторезистора от индукции для разных его форм

10.7. Магниторезистивные преобразователи
Для увеличения электрического сопротивления путем увеличения рабочей длины магниторезистора последний выполняют в виде меандра (рис. 10,17, а) [12]. Для увеличения сопротивления при одновременном сохранении высокой чувствительности магниторезистор выполняют в виде ряда последовательно соединенных полупроводниковых пластин, разделенных токопроводящими слоями. В этом случае преобразователю предоставляют обычно также форму меандра (рис. 10.17, б).
Токопроводящий слой
а) |
б) |
Рис. 10.17. Магниторезистор в форме меандра
Еще один тип магниторезисторного датчика фирмы Honeywell (рис.10.18) описан в [39].
Рис. 10.18. Магниторезисторный датчик на основе пермаллоя
Принцип работы этого датчика основан на изменении направления намагниченности внутренних доменов слоя пермаллоя (NiFe) под воздействием внешнего магнитного поля. В зависимости от угла между направлением тока и вектором намагниченности изменяется сопротивление пермаллоевой пленки. Под углом 90° оно минимально, угол 0° соответствует максимальному значению сопротивления.
Конструкция магниторезистивных датчиков Honeywell состоит из четырех пермаллоевых слоев, которые организованы в мостовую схему. Кроме того, на плату датчика добавлены две катушки: SET/RESET и OFFSET. Катушка SET/RESET создает легкую ось, которая необходима для поддержания высокой чувствительности датчика, катушка OFFSET предназначена для компенсации воздействия паразитных магнитных полей (созданных, например, ка- ким-либо ферромагнитным объектом или металлическими предметами).
Датчики позволяют измерять самые слабые магнитные поля (от 30 мкГаусс) с последующим их преобразованием в выходное напряжение. В конструкции датчика могут быть объединены несколько мостовых схем, образуя, таким образом, двух- и трехосевые сенсоры.

Глава 10. Электромагнитные преобразователи
Магниторезистивные датчики применяются для:
•контроля перемещений объектов в робототехнике;
•измерения слабых полей (системы навигации, компенсация поля Земли, электронные и цифровые компасы и т.д.);
•измерения частоты вращения (КПП, АБС, системы управления двигателем);
•измерения угловой координаты (например, для регулировки сидения, в посудомоечных машинах, в системах рулевого управления, для регулировки фаз и т.д.);
•построения бесконтактных датчиков тока с гальванической развязкой.
10.8. Магнитодиоды
Магнитодиодом (МД) называется преобразователь магнитного поля, принцип действия которого основан на магнитодиодном эффекте.
Магнитодиод представляет собой полупроводниковый прибор с р-п переходом и невыпрямляющими контактами, между которыми находится область высокоомного полупроводника (рис. 10.19, а). Отличие от обычных полупроводниковых диодов состоит в том, что магнитодиод изготавливается из высокоомного полупроводникового материала, проводимость которого близка к собственной, а ширина базы d в несколько раз больше диффузионной длины пробега носителей L, в то время как в обычных диодах d < L. В «длинных» диодах при прохождении электрического тока определяющими становятся процессы, зависящие от рекомбинации и движения неравновесных носителей заряда в базе и на поверхности.
а) |
б) |
Рис. 10.19. Конструкция (а) и вольт-амперная характеристика (б) «торцевого» магнитодиода
Длину L можно изменять, воздействуя на диод магнитным полем. Оно приводит к закручиванию движущихся носителей, и их подвижность уменьшается, следовательно, уменьшается и L. Одновременно удлиняются линии тока, то есть эффективная толщина базы растет. Это и есть магнитодиодный эффект.

10.9. Магнитотранзисторы
Если магнитодиод, через который протекает ток, поместить в поперечное магнитное поле, то произойдет увеличение сопротивления базы. Сопротивление базы увеличивается и за счет повышения роли поверхностной рекомбинации отклоняющихся к поверхности полупроводника носителей заряда.Эквивалентную схему магнитодиода можно представить в виде магниторезистopa с последовательно включенным усилителем. Типичная вольт-амперная характеристика «торцевого» магнитодиода приведена на рис. 10.19, б.
На рис. 10.20 даны без объяснений две простейшие схемы включения магнитодиодов в электрическую схему.
а) |
б) |
Рис. 10.20. Схемы включения магнитодиодов: а — в транзисторный каскад, б — к операционному усилителю
Применение магнитодиодов. Магнитодиоды применяются в качестве чувствительных элементов в функционально-ориентированных магнитных датчиках: скорости и направления вращения, угла поворота и преобразователях типа «угол—код», уровня и т.п. Их используют в бесконтактной клавиатуре ПЭВМ, вентильных электродвигателях, бесконтактных реле предельного тока, регуляторах электрической мощности, в бытовой электронной аппаратуре, системах автоматического управления, устройствах считывания информации ЭВМ, в электронных и электрифицированных игрушках и т.д.
Физика процессов в магнитодиодах, их характеристики описаны в работах [1, 2, 4—6, 11, 13].
10.9. Магнитотранзисторы
Наибольшее практическое распространение получили горизонтальные (планарные) магнитотранзисторы, т.е. транзисторы, коллекторы которых расположены на одной поверхности пластины (рис. 10.21). Их магниточувствительные свойства обусловлены двумя основными эффектами — изменением эффективной длины базы и отклонением инжектированных носителей от коллектора (либо к нему) [1, 11, 13].
В отсутствие магнитного поля инжектированные из эмиттера Э носители движутся под действием электрического поля Е к коллектору К и попадают в область его объемного заряда. Одновременно они диффундируют в глубь базы Б.